







 with(plots): R:=1:zhumian1:=plot3d([R*cos(t),R*sin(t),z],z=-2*R..2*R, t=0..2*Pi,color=yellow):zhumian2:=plot3d([R*cos(t),y,R*sin(t)],y=-2*R..2*R, t=0..2*Pi,color=green):zhumian3:=plot3d([x,R*cos(t),R*...
with(plots): R:=1:zhumian1:=plot3d([R*cos(t),R*sin(t),z],z=-2*R..2*R, t=0..2*Pi,color=yellow):zhumian2:=plot3d([R*cos(t),y,R*sin(t)],y=-2*R..2*R, t=0..2*Pi,color=green):zhumian3:=plot3d([x,R*cos(t),R*...
with(plots): R:=1:
zhumian1:=plot3d([R*cos(t),R*sin(t),z],z=-2*R..2*R, t=0..2*Pi,color=yellow):
zhumian2:=plot3d([R*cos(t),y,R*sin(t)],y=-2*R..2*R, t=0..2*Pi,color=green):
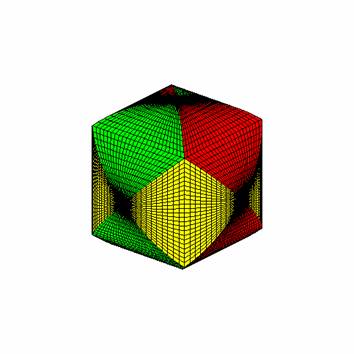
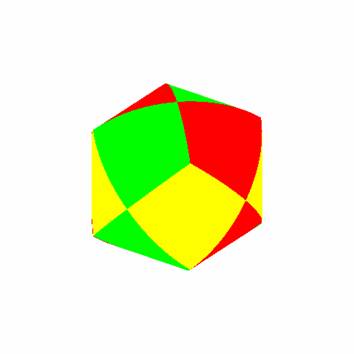
zhumian3:=plot3d([x,R*cos(t),R*sin(t)],x=-2*R..2*R, t=0..2*Pi,color=red):
display(zhumian1,zhumian2,zhumian3,scaling=constrained,orientation=[40,65]);
三个圆柱面所围成的立体:
with(plots): R:=1:
zhumian_a1:=plot3d([R*cos(t),R*sin(t),z],z=-R*sin(t)..R*sin(t),t=-Pi/4..Pi/4,color=yellow):
zhumian_a2:=plot3d([R*cos(t),R*sin(t),z],z=-R*cos(t)..R*cos(
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6235
6235











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









