






 本文主要介绍了ABB IRC5 Compact控制柜与IBR1200机器人本体的接线步骤,包括动力电缆、SMB电缆和示教器电缆的连接方法。在断电状态下,SMB板上的电池确保轴编码器能记住机器人位置。
本文主要介绍了ABB IRC5 Compact控制柜与IBR1200机器人本体的接线步骤,包括动力电缆、SMB电缆和示教器电缆的连接方法。在断电状态下,SMB板上的电池确保轴编码器能记住机器人位置。
新人在接触机器人的时候,一般不清楚到底机器人本体和控制器需要接多少线,接下来我来和大家分享下ABB机器人控制柜IRC5 Compact控制柜和机器人本体IBR1200的接线。
机器人与控制柜需要三条连接电缆,分别是1.动力电缆、2.SMB电缆、3.示教器电缆。(图1为控制柜动力电缆线XS1,图2为机器人本体尾部动力电缆),这里重点解释下SMB电缆,机器人本体有个SMB板,在控制柜断电的情况下,SMB板上有个电池供电,因为每个轴编码器全部汇总到这个SMB板上,所以可以在断电情况下记忆机器人当前位置。

图1控制柜动力电缆线XS1

图2为机器人本体尾部动力电缆
SMB电缆(直头)接入到控制柜XS2一端(图3),SMB电缆(弯头)接入到本体底座SMB端口(图4)

(图3)XS2机器人控制柜SMB电缆(直头)

(图4)机器人本体SMB电缆(弯头)
示教器电缆(红色)连接到控制柜XS4端口。(图5)
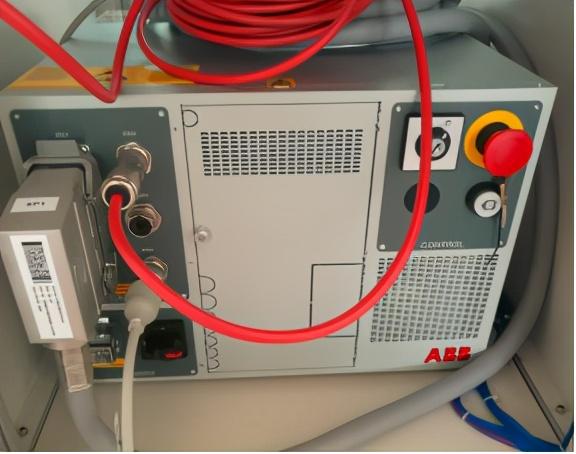
(图5)示教器电缆线连接脚位
除此之外,机器人还需要接入一条电源线(根据机器人型号及接头参数,准备电源线并制作控制柜端的接头)

(图6)XP0电源接线

(图7)接线器材

(图8)XP0接线口,旁边电源开关
本次分享就到这里,我是工控滁哥,感谢大家的支持,欢迎留言转发和关注,持续更新实用技术。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









