






让产品守护生活,行动发现产品之美,以技术分析为基础,工艺为着眼点,关注用户使用及体验,最专业的“星耀杯”全国智能门锁测评活动正在火热进行中。
西门子——世界五百强企业,品牌百强企业,是专注于电气化、自动化、数字化战略的全球巨型企业之一,致力中国市场超过了140年。近年来,随着智能门锁产业的高速发展,这家世界巨头企业也于2019年初正式进入到智能门锁行业,并于7月初发布了首款旗舰产品西门子C321智能门锁,受到了行业和市场的普遍性关注。
本次“星耀杯”智能门锁测评团队采样到了西门子两个不同型号的智能门锁产品,其中本次测评的产品是旗舰机型C321,以期让市场及消费者了解,作为全球知名的电气化巨头,智能门锁的产品到底是怎样的,其外观、工艺、结构及功能体验是否如品牌观一样呢?
一、外表看就很“西门子”
一致的色系、一致的风格、仅从外包装来看,西门子品牌的辨识度就非常高,极具品牌特点——简洁、大气、清晰、明了,给人强烈的品牌归属感,这是测评团队见到西门子C321智能锁的第一反应。同时测评团队注意到,西门子的外包装说明是目前最全面的智能锁之一,包括了产品型号、生产商、制造商、工作条件、执行标准、服务方式等内容,体现了百年企业的历史积淀,让测评团队对这款锁充满了期待。

打开外包装,可以明显看得出旗舰产品的优势,非常齐全、整洁。安装使用说明书、尺寸规格卡、锁体包及配件包一应俱全,配件包内含有锁芯包、钥匙包、电池包、安装工具包,每样配件均有白色的独立外包装,显得清晰明了,唯一让测评小组感到美中不足的一点是,单独的配件包没有标识说明,需要打开查看,但瑕不掩瑜,这仍然不失为旗舰机中最优秀的外包装结构之一。

见到锁的真面目时,测评小组感觉这把锁总体走简约风格,直板式的外观,把手指纹识别、半自动锁,最上方有一块突出的部分写着西门子的标识,全隐藏式应急锁芯、应急充电等是目前主流通用的外观结构之一,但却总给人一种似曾相识的感觉,这可能就是品牌的调性使然吧。

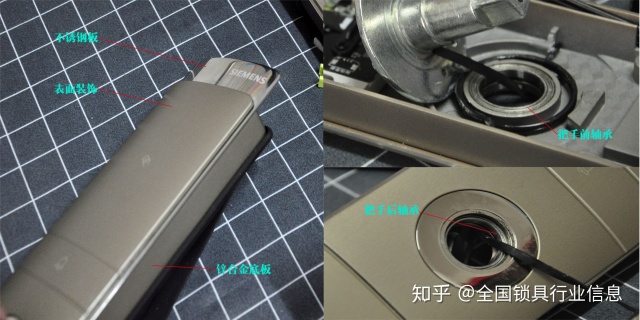
这款锁表面装饰板采用的是IML技术的金色拉丝工艺,看起来很有科技感,细节处理非常到位。接缝处均匀,没有明显的翘起和不平整现象,表面没有发现处理不到位的毛刺出现;卡扣式的结构,保障了牢固度;装饰板下,一块全不锈钢防护板的独特设计,体现了一种全新的外观构造,让测评小组也不禁猜测,这块钢板设计是否是为了更好的安全防护而为呢?
面板底板采用锌合金压铸,表面喷金色油漆处理,整体抛光整洁,喷漆均匀,没有发现起泡、脱落、掉漆等情况;但把手让测评小组有一些惊讶,一方面这款锁采用了瑞典FPC极少见的大面积192的传感器,提升使用体验,另一方面这款锁的把手竟然采用了全实心的金属打造,并实现把手指纹识别,有些略显粗重,体验上有一些差异,但却非常的结实,体现了德国企业对工艺追求的极致精神。

二、从工艺看,仍然是很西门子
从外观及包装配件上来看,这款锁很具有西门子品牌的调性及品牌特色,让测评小组充分感受到了西门子品牌的底蕴,但内部的结构以及工艺是否如外观一样具有西门子特色呢?带着疑问与期待,测评小组开始了下一步的拆机工作。
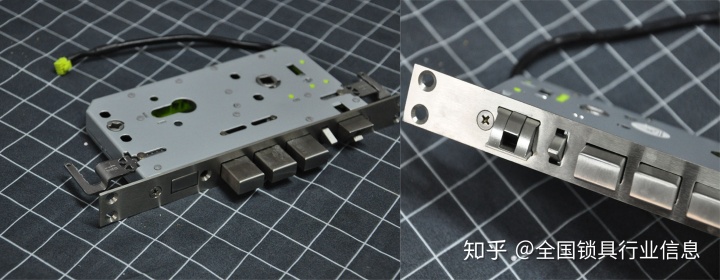
从锁体来看,这款锁采用的锁体规格为60系通用锁体,材质及结构采用了当前智能门锁旗舰产品标准配置,具备锁舌状态的传感装置,核心受力部件均为不锈钢精铸而成,锁体的连接线材、电机等均采用了国内一线大厂的产品,与其它锁体不一样的是这款锁体没有使用常用的电子反锁按键,而是机械式反锁装置,通过装置的改进提升了用户的体验。
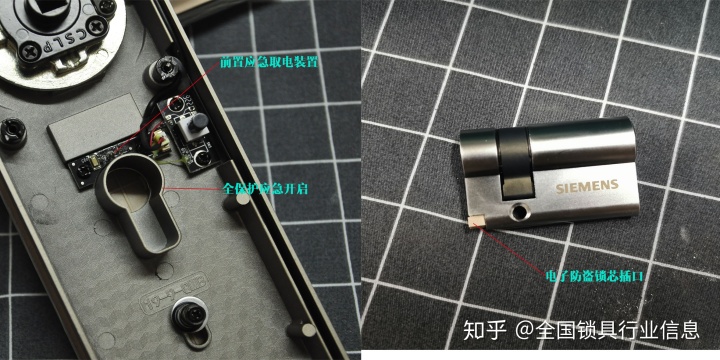
打开前面板,同样很具有西门子的特色,整个前面板布局合理、专用走线槽更加工整,结构清晰简单,上半部分是模块化的电子方案,中间把手结构,下半部USB应急取电,直插式应急开启装置保护也做的很到位,下面的音腔设计也体现了大厂的风格。
拆解电子部分,模块化的电子部分设计使得拆解非常的方便,更加利于维护。主板、元器件、线材均是国际一线大厂品牌,显示了西门子对供应链把控的专业性与严谨性,线路板印刷与三防措施做的也非常到位。但让测评小组关注的是在发布会当中宣传的“法拉第笼”的设计。
在拆下了电子主板之后,测评小组发现了在主板后方有一块不锈钢网状的板,判断应该是在宣传中与面板共同组成的“法拉第笼”的一部分,这种结构是目前在智能锁当中极少采用的结构,但却对电磁安全性能的提升起到了极大的作用。同时,在拆解电子部分的过程中,测评小组发现,这款锁疑似采用了双处理器结构,是双向通讯,即前面板不负责处理相关数据,只做传输,而是由内面板中的处理器处理相关数据及判断,大大提升了信息及电子安全性。这更让测评小组对这款锁产生了期待。

在把手结构的拆机过程中,测评小组最关注的是关于把手指纹识别装置的线材处理以及把手手感体验的处理,这款锁也给了测评小组一些惊喜。在把手走线结构当中,这款锁同样采用了两段式固定装置,以确保线材不被换向、上提下压把手时被扯断,但在细节处理上却体现了西门子的严谨,在把手头固定线位置,因是经常会出现摩擦,这款锁细心的放上了一个胶垫,以减少摩擦,提升使用寿命。

与此同时,在拆解把手的过程当中,在把手结构前、后两端各发现了一个滚珠轴承,这两个轴承直接提升了把手在使用过程中的体验,该结构也是大量的被应用于智能门锁的旗舰机型当中。
同时,测评小组通过拆解的不断深入也更加了解了这款锁“三明治”结构的优点,IML负责装饰,不锈钢板负责防暴安全、电磁安全,底板负责安装固定各种配件,三部分各司其责,各有其专,这种结构是目前测评小组在智能锁测评过程中首次发现的亮点,极具西门子品牌产品的个性特征。
在下半部分的结构中,测评小组发现了一处贴心的设计以及提升安全性能的装置。这款锁USB应急取电及插式锁芯采用全隐藏式,在前面板的下部,用卡扣式面板全隐藏,使得外观看起来更加简洁,同时直插式应急取电设计一举解决了在底部应急取电使用过程中插入困难,不好判断插入状态等体验不佳的问题,同时应急开启锁芯一方面在面板结构上做了全锁芯防护装置,以防止暴力手段开启,另一方面还采用了目前在智能门锁中少见的电子报警锁芯装置,极大的提升了安全性能的短板,使得整机的防护安全得到提升。
打开后面板,果然如测评小组猜测的一样,在后面板上发现了一块主板及相应的处理器,并且共有三条数据线,一条是与前面板通讯、一条与锁体通讯,另一条是电子防盗锁芯的通讯线,基本上可以确认这是一款具备了更加安全的双向通讯的智能门锁。同时,测评小组在后板还发现,由于采用了机械式反锁,同时为了防止意外因素导致室内被反锁,这款锁采用了一种特殊的结构,在旋钮上添加了弹簧,只在下压才可以旋转,提升了用户体验,也不失为一种优秀的设计之一。

同时,测评小组发现,也许是西门子的品控要求,这款锁的后板数据线显得有一些粗、长,容易导致安装困难,并且在后续的安装过程中也确实发现安装时收线比较费力。
三、安装及功能体验
因为采用了标准的60系列的锁体,西门子C321这款锁安装并没有特别费力,20分钟左右就在锁架上安装成功了,是安装比较方便的锁之一,一般动手能力强的用户可以自行安装。但在安装的过程中要注意的问题是方杆的长度一定要适合,否则会出现安装尺寸对不上导致门锁被顶住的现象发生,方杆长度在与门两侧持平或者超过3mm以内最好。

在功能体验上,这款锁尽管只是预留了网络功能,只具备传统的指纹、密码、CPU高安全加密卡、机械开启等四项功能,但仍然给测评小组留下了深刻的印象,在使用体验上非常具备西门子的特色。
首先声音完全模拟了真人语音,是目前智能锁测评中语音效果最佳的智能锁之一,甚至测评团队有些人认为没有之一,是最佳的;其次导航功能非常全面和清晰,完全可以不依赖说明书来设置相关功能;第三,读卡采用的是高安全的CPU卡,基本上杜绝了被复制的功能,但用户想要配卡也只能找厂家;第四,使用体验及灯光细节,无论是把手以及大面积识别都是目前测评当中最优之一,灯光细节的柔和度及舒适度体现了国际一线品牌的实力。
四、总体评价
经过了近两天的外观、拆机看结构、安装、功能体验等几个维度的测评后发现,西门子C321这款锁给测评小组的直观印象是:这是一款极具西门子特色的智能门锁。
从外观到表面处理细节等体现了国际品牌对产品的要求,显示了品牌特色;在使用体验细节上,双轴承结构,极大地提升了使用的舒适度,灯光、声音等细节则更加贴心;在结构上,无论是独特的“三明治”结构、电子报警锁芯、双向通讯功能、“法拉第”牢笼、电子报警等均提升了产品的安全性;从结构性能、工艺要求等方面来看,这款锁在质量和产品上的要求体现了德国企业对产品精益求精的态度。
但两天的测评过程当中,测评小组仍然发现,把手粗壮会给使用上带来一定的差异,安装过程中,方杆安装切割长度要求偏高,安装收线不方便,暂时不具备网络通讯功能仍会有一些遗憾。但这仍然不能影响测评小组对这款锁的评价,这款锁很“西门子”,是旗舰机型的顶尖水平之一。

















 331
331

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









