






一图两篇不同思路范文:
- 01
熊猫弟弟住在幽竹林山泉路,熊猫弟弟最喜欢唱歌,没事就会哼上几句,一直都想拥有一个话筒。
在一个夏日晴朗的下午,那天刚好是它的生日,他坐在院子里独自画画,画了一个金色的话筒,心想:要是这支话筒能够唱歌就好了。一个金色的话筒就真的出现在它面前。
他惊呆了!简直不敢相信自己的眼睛,他抑制不住内心的喜悦想:难道我画什么,就会出现什么吗?
他试着画了一只小鸭,心想:要是小鸭能够听到我唱歌就好了!一想完,他的眼前就出现了一只“嘎嘎叫”的鸭子,一摇一摆地朝它走来!他觉得神奇极了!
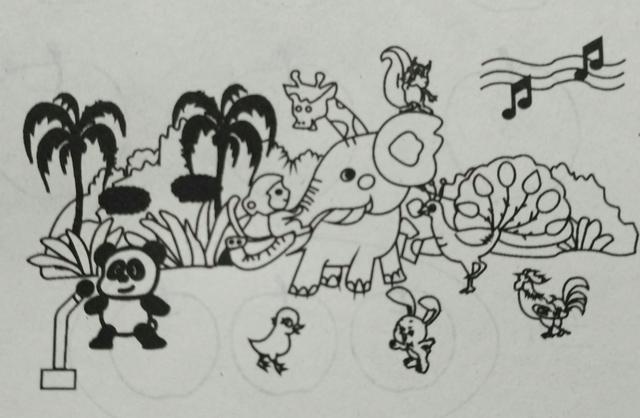
熊猫弟弟又画了兔子,公鸡,松鼠,猴子,孔雀,梅花鹿,大象!他们都出现在熊猫弟弟面前!
熊猫弟弟拿起那只金色的话筒,又唱又跳!动物们也跟着他跳起来唱起来!松鼠跳到大象的耳朵上,猴子跃到大象的鼻子上……
他们唱啊,跳啊!开心极了!
- 02
前几天,森林精灵送给小熊猫一支会唱歌的话筒,他拿着话筒边走边唱“我是勇者!你也是,他也是,咚咚……”正在洗澡的小象听到了,伸伸腿,甩甩鼻子,也跟在小熊猫后面唱了起来!
吊在树上吃香蕉的猴子听到了,扔掉香蕉一溜烟爬到小象鼻子上,甩着小象鼻子唱了起来。
不远处一只梅花鹿竖着耳朵吃着鲜嫩的叶子,她马上转过身不吃了,蹬蹬腿,也跟着唱了起来。
“这首歌太好听了!我也参加!”松鼠丢掉松子,“嗖”地从松树上窜下来跳到小象背上。
他们的队伍越来越大!孔雀展开美丽的尾巴来了;公鸡顶着红冠昂着头来了;小兔子一声不吭地来了;小鸭摇摇晃晃地迈着步子悄悄跟在后面,扭着屁股唱了起来……
“我是勇者,你也是,他也是!咚咚……我们大家都是!”
歌声在林中穿越,飞荡,一浪高过一浪!
看图写话小提示:
以上面看图写话为例子,根据这样一幅图要编写出一个童话来,引导很重要,爸爸妈妈可以这样引导孩子编写。
遇到动物类看图写话,可以融入简单的情节,从趣味性入手,调动孩子的多重感官,充分引导孩子发挥想象力,尝试编写童话。
首先引导孩子说说小动物在干啥?
孩子们肯定都能说出唱歌跳舞,因为图中有音符和话筒。
再引导孩子猜猜动物们为什么这样做?
孩子们可能会说:他们在开生日派对、表演、动物节……任由他们发挥想象。
因为看图写话就是要重发挥想象!而且还要大胆!
最后引导孩子把故事串起来,这一步很难,爸爸妈妈可以运用填空的方法,或者运用思维导图方式,还可以运用续编的方法……
总之,每一次动物类的看图写话都可以引导孩子编写童话为以后作文打下基础!

以上文字仅属于个人观点,欢迎留言探讨更多的方法!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









