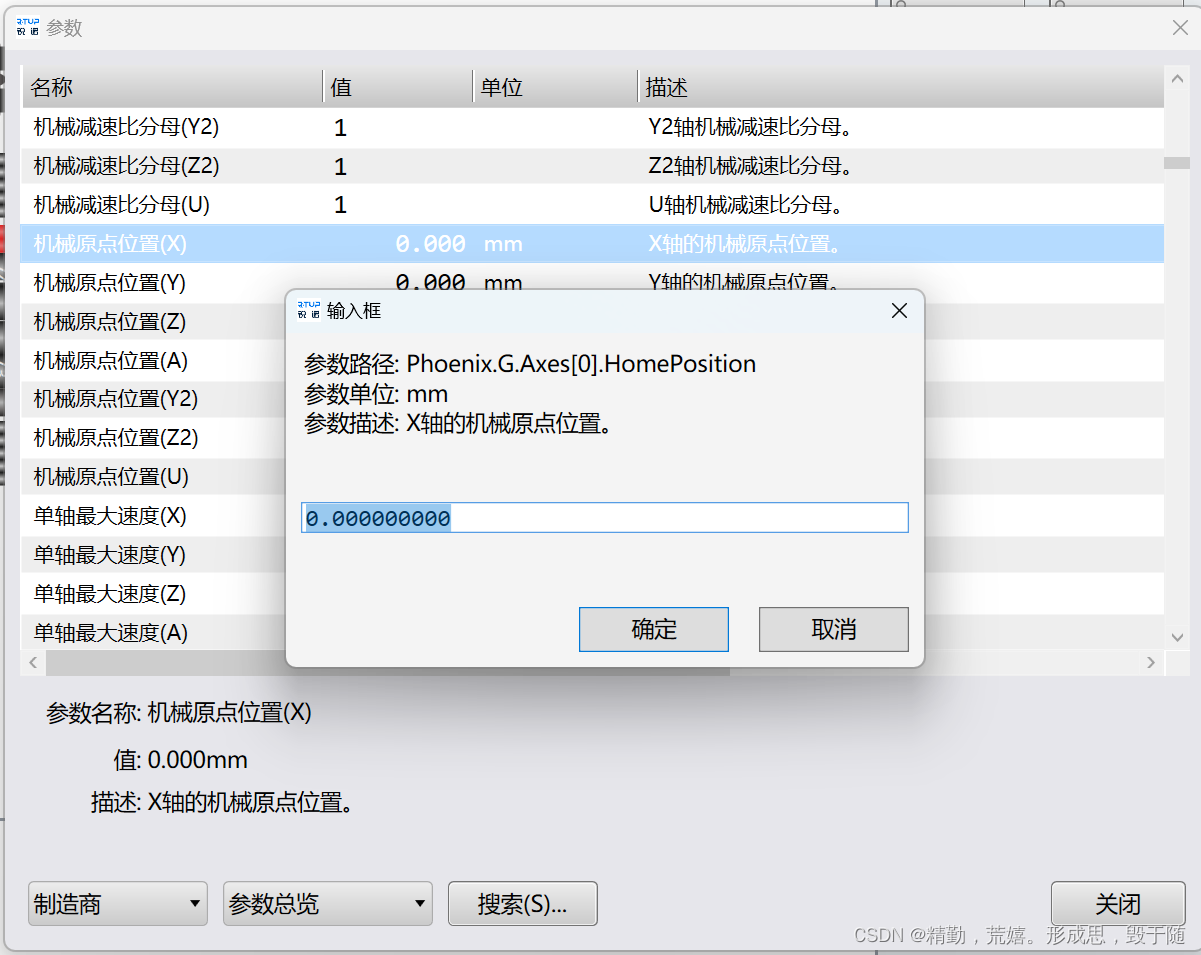
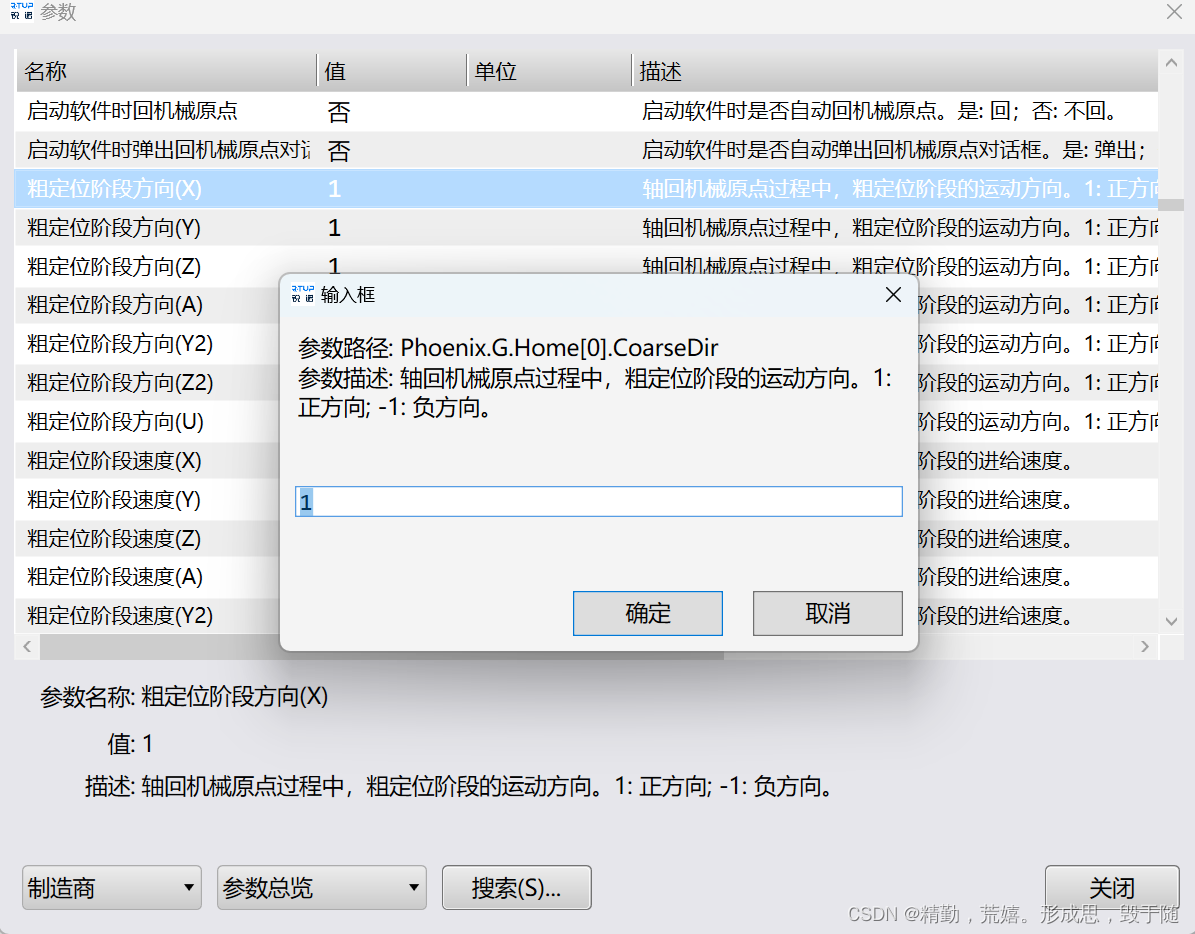
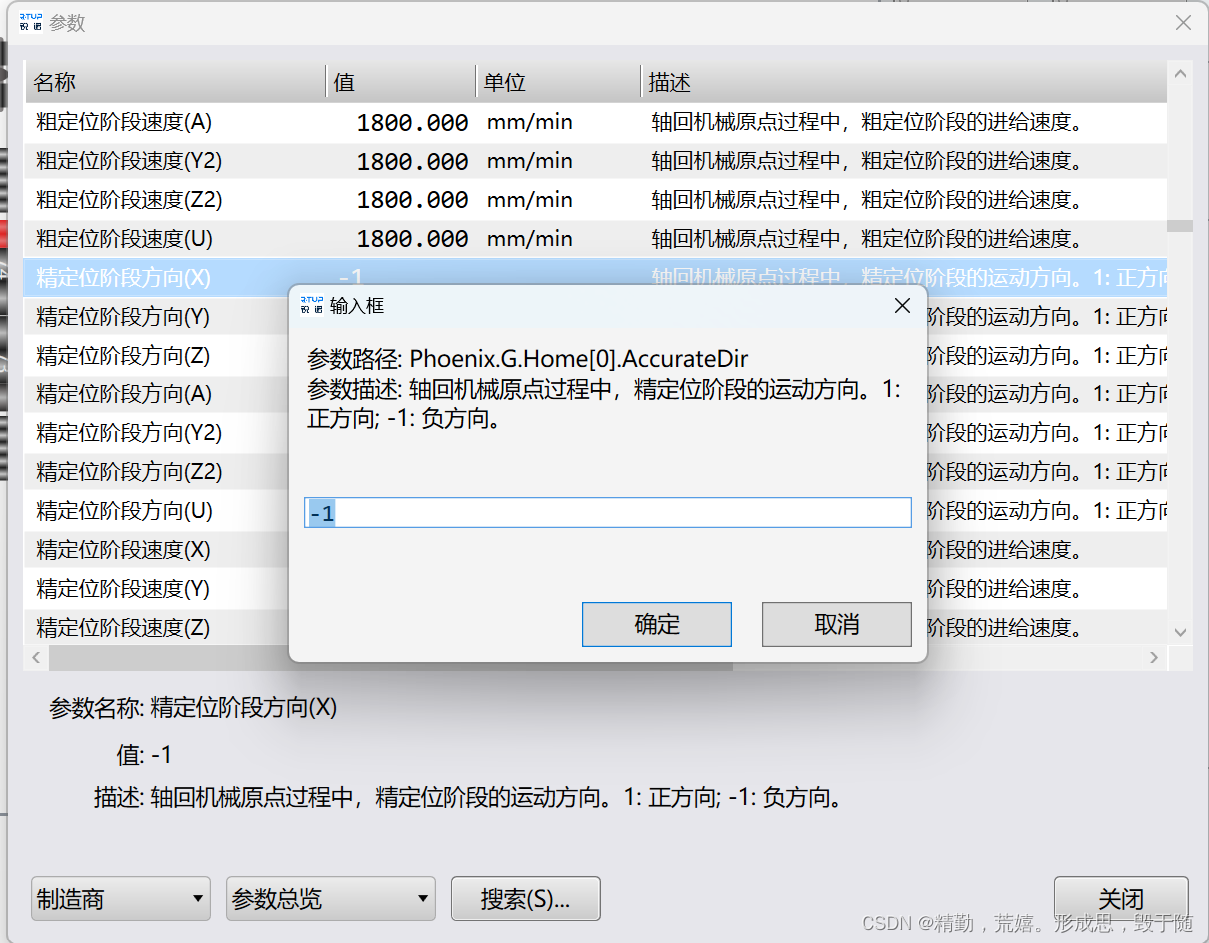
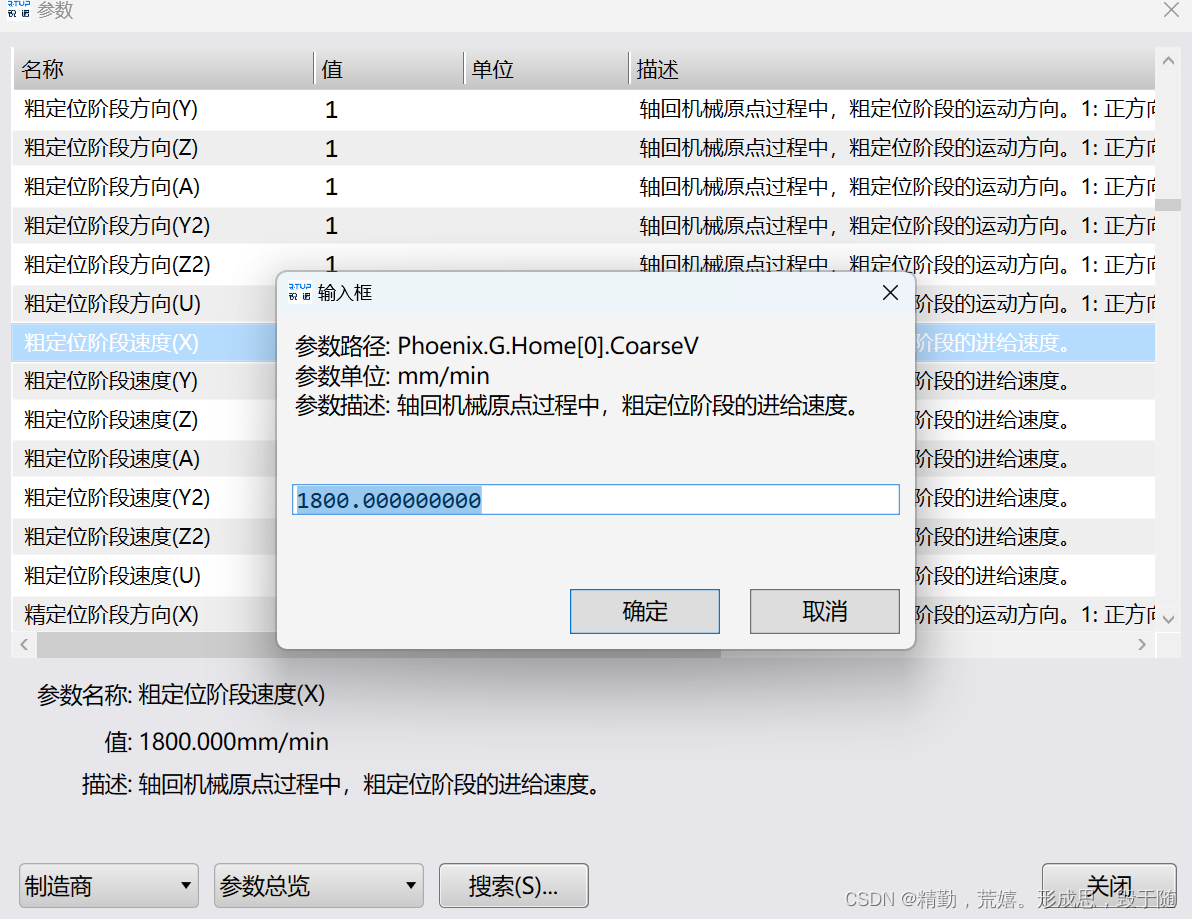
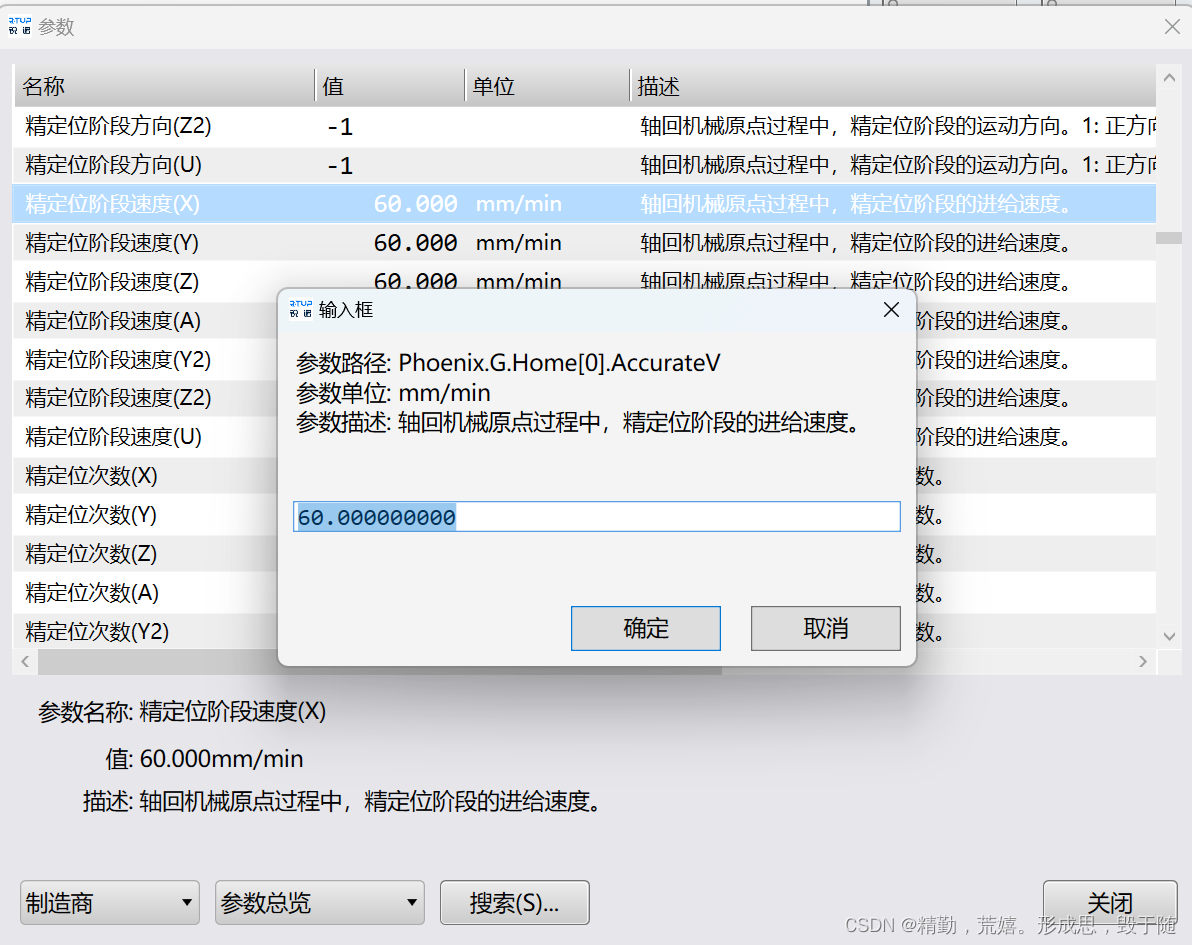
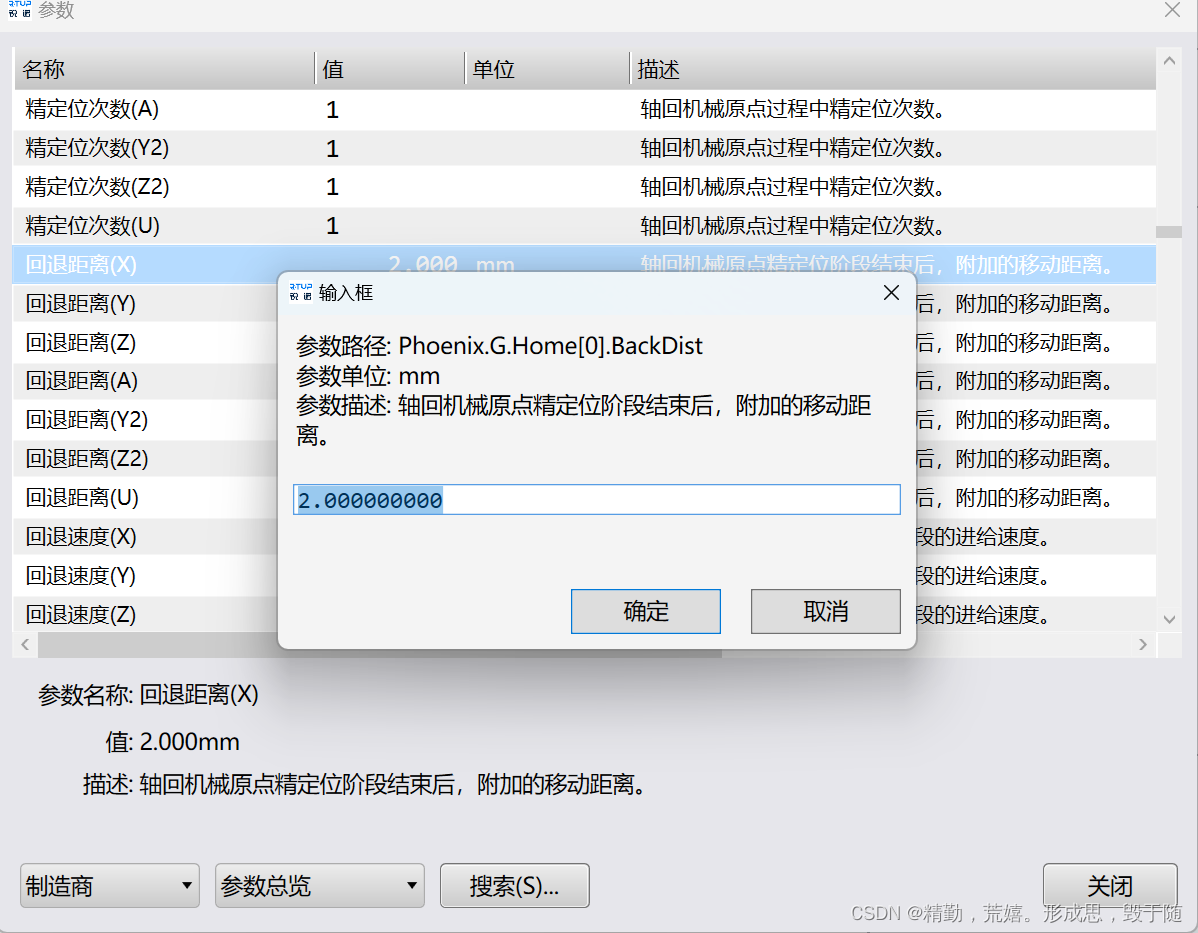
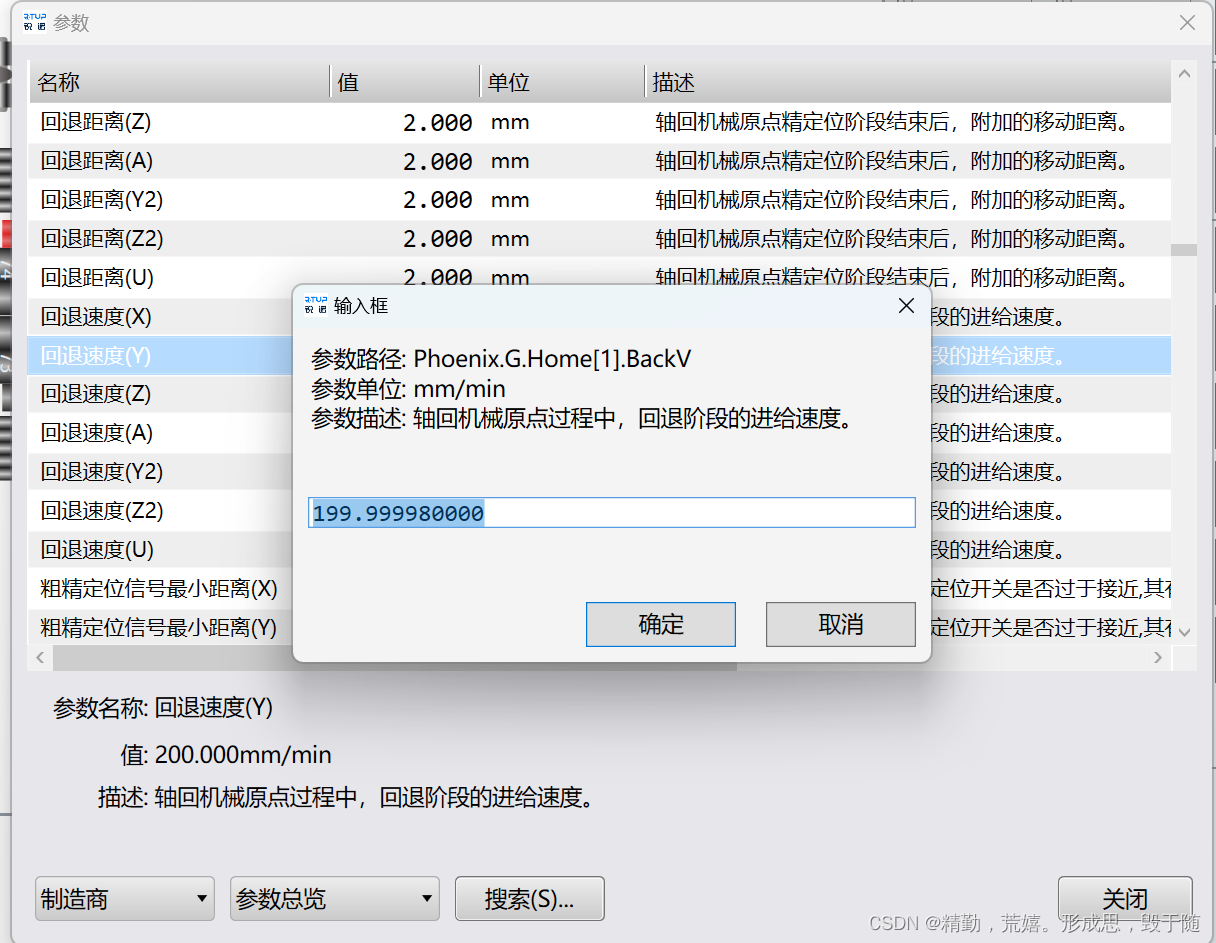
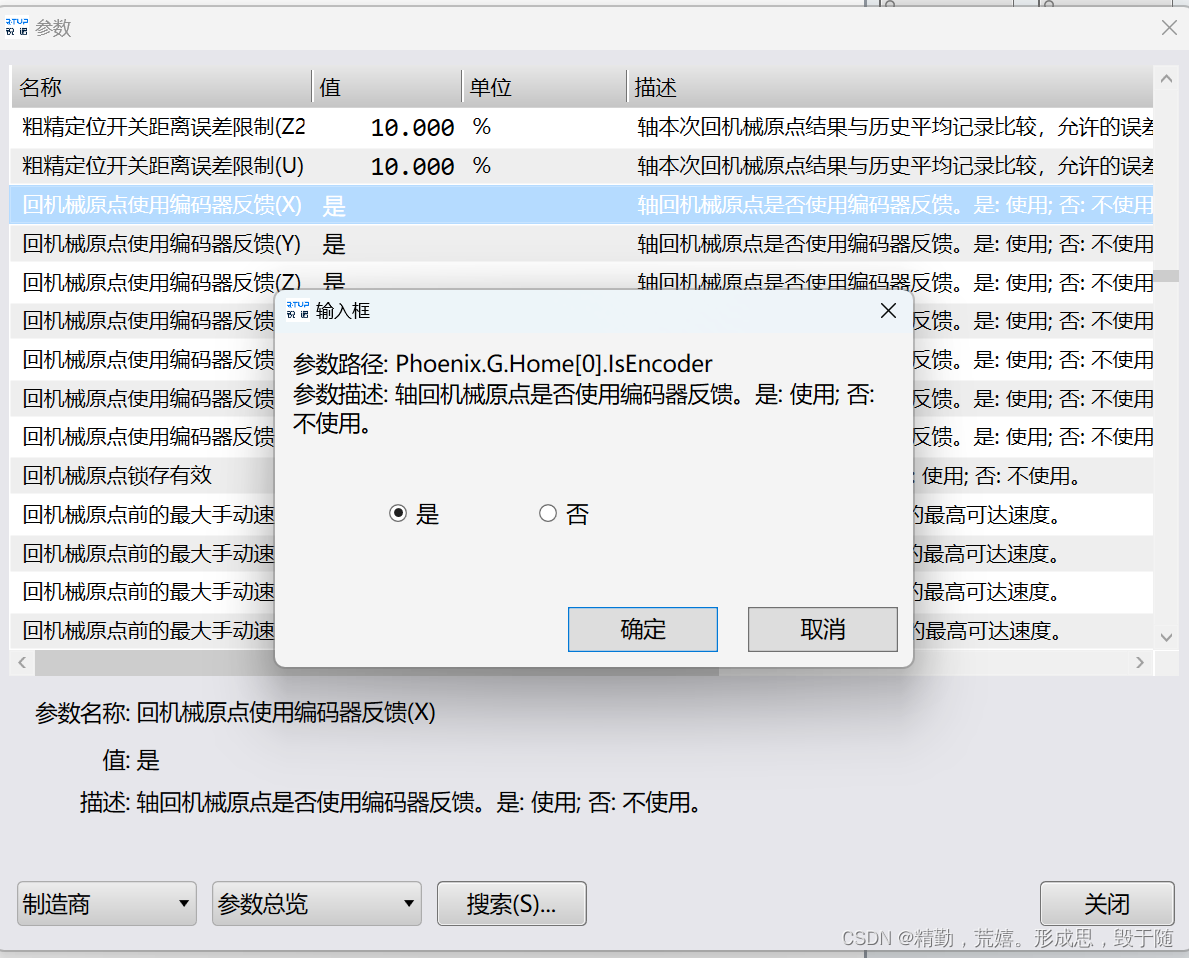
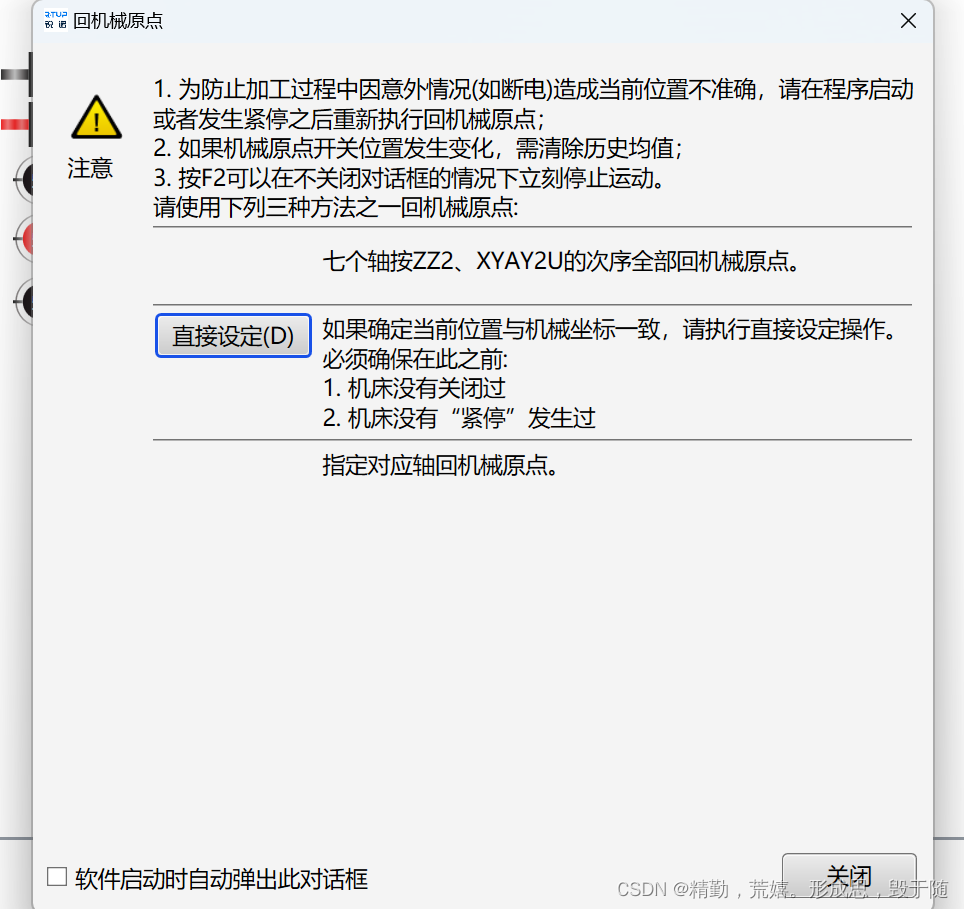
回机械原点 (1)设置机械原点的位置 (2)设置粗精定位方向 (3)设置粗精定位的速度以及精定位次数 (4)设置回退距离和回退速度 (5)设置编码器反馈 (6)回机械原点 注意,首次回机械原点前先检查机械原点信号-使用手轮引导-先回Z轴


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 文章详细阐述了回机械原点的六个步骤,包括设置原点位置、定位方向和速度,设定回退距离和速度,以及依赖编码器反馈来确保精度。首次操作前需检查机械原点信号,并优先回Z轴。
文章详细阐述了回机械原点的六个步骤,包括设置原点位置、定位方向和速度,设定回退距离和速度,以及依赖编码器反馈来确保精度。首次操作前需检查机械原点信号,并优先回Z轴。