




简介:Modbus TCP是一种广泛应用于工业自动化系统的通信协议,基于TCP/IP实现设备间数据交换。本文详细讲解如何使用C#语言开发一个功能完整的Modbus TCP客户端。内容涵盖Modbus协议基础、TCP通信实现、报文构造与解析、功能码操作、异步编程、异常处理、性能优化以及实际应用场景。通过本项目,开发者可以掌握工业通信开发的核心流程,并提升C#网络编程能力。
1. Modbus TCP协议原理与基础
Modbus TCP是一种基于以太网的工业通信协议,起源于1979年Modicon公司为PLC设备设计的串行通信协议。随着工业自动化的发展,Modbus协议逐渐演进为支持TCP/IP网络的Modbus TCP,成为跨平台、跨设备的标准通信方式。
1.1 Modbus TCP的通信模型
Modbus TCP协议基于客户端-服务器架构,运行在TCP/IP协议栈之上。它使用端口号502进行通信,具备良好的开放性和兼容性。协议通过以太网传输数据,实现设备之间的可靠连接与数据交换。
1.2 Modbus TCP在OSI模型中的位置
| OSI 层级 | Modbus TCP 的实现 |
|---|---|
| 应用层 | Modbus应用数据与功能码 |
| 传输层 | TCP协议(端口号502) |
| 网络层 | IP协议(IPv4/IPv6) |
| 链路层 | 以太网或Wi-Fi通信 |
Modbus TCP将原始Modbus协议封装在TCP/IP数据包中,省去了串行通信中的校验(如CRC),由TCP协议保障数据完整性与顺序性,提升了通信的稳定性和传输距离。
2. Modbus功能码详解(0x03/0x04/0x06)
Modbus协议是一种广泛应用于工业自动化领域的通信协议,其核心在于通过功能码(Function Code)实现对设备寄存器的读写操作。本章将深入解析Modbus协议中三个常用的功能码:0x03(读取保持寄存器)、0x04(读取输入寄存器)、0x06(写入单个寄存器),从功能码的结构、通信流程、数据格式到实际应用场景进行详细剖析。
2.1 Modbus协议中的功能码概述
Modbus协议中定义了多个功能码,用于指示主站(客户端)向从站(服务器)发送的请求类型。这些功能码决定了从站如何响应请求、读取或写入哪些寄存器数据。
2.1.1 功能码的作用与分类
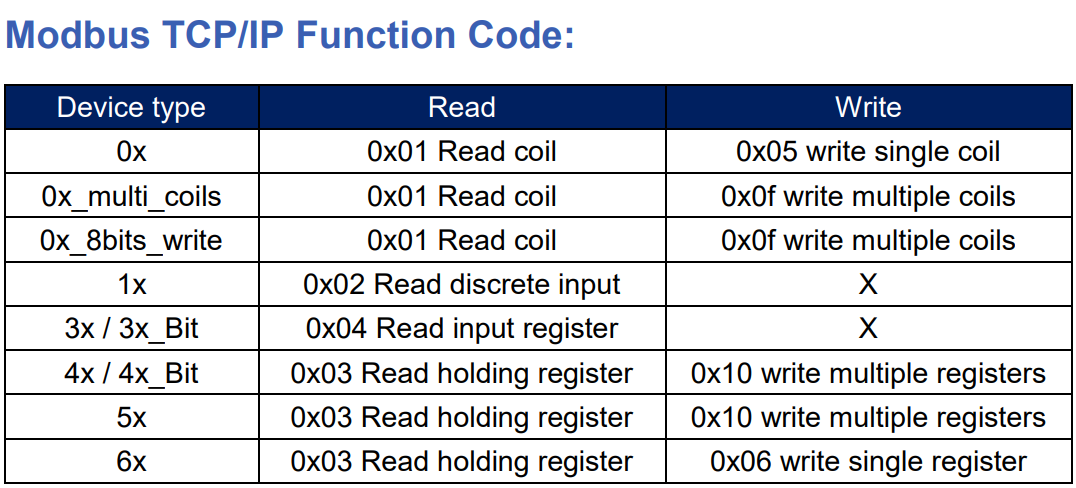
Modbus功能码用于标识主站请求的类型。常见的功能码包括:
| 功能码 | 十六进制 | 描述 |
|---|---|---|
| 01 | 0x01 | 读取线圈状态 |
| 02 | 0x02 | 读取离散输入状态 |
| 03 | 0x03 | 读取保持寄存器(Holding Register) |
| 04 | 0x04 | 读取输入寄存器(Input Register) |
| 05 | 0x05 | 写入单个线圈 |
| 06 | 0x06 | 写入单个保持寄存器 |
| 15 | 0x0F | 写入多个线圈 |
| 16 | 0x10 | 写入多个保持寄存器 |
功能码可以分为以下几类:
- 读操作类 :如0x03、0x04;
- 写操作类 :如0x05、0x06、0x0F、0x10;
- 异常类 :当请求失败时,从站返回的功能码为原始功能码加0x80,如0x83表示功能码0x03请求失败。
2.1.2 通用功能码与保留功能码的区别
Modbus协议定义了标准功能码和保留功能码两类:
- 通用功能码 :由Modbus官方定义,所有设备厂商必须支持,例如0x03、0x04等;
- 保留功能码 :用于特定设备厂商自定义功能,如一些高级诊断功能、设备状态查询等。保留功能码不能被通用客户端直接使用,需根据设备手册进行适配。
2.2 功能码0x03:读取保持寄存器
功能码0x03是Modbus中最常用的功能码之一,用于主站读取从站中的保持寄存器(Holding Register)数据。
2.2.1 请求与响应报文结构
请求报文结构(主站发送):
| 字段名称 | 字节数 | 描述 |
|---|---|---|
| 从站地址 | 1 | 从站设备的唯一标识(0x01) |
| 功能码 | 1 | 固定为0x03 |
| 起始寄存器地址 | 2 | 要读取的第一个寄存器地址 |
| 寄存器数量 | 2 | 要读取的寄存器个数 |
响应报文结构(从站返回):
| 字段名称 | 字节数 | 描述 |
|---|---|---|
| 从站地址 | 1 | 从站设备的唯一标识(0x01) |
| 功能码 | 1 | 固定为0x03 |
| 字节数 | 1 | 返回数据的总字节数 |
| 数据内容 | N | 每个寄存器占2字节,共N = 2 × 数量 |
示例代码(C#构造请求报文):
byte[] BuildReadHoldingRegistersRequest(byte slaveId, ushort startAddress, ushort registerCount)
{
byte[] request = new byte[12]; // Modbus TCP请求长度为12字节
// MBAP头(前8字节)
request[0] = 0x00; // Transaction ID High
request[1] = 0x01; // Transaction ID Low
request[2] = 0x00; // Protocol ID High
request[3] = 0x00; // Protocol ID Low
request[4] = 0x00; // Length High
request[5] = 0x06; // Length Low(6字节的PDU)
request[6] = slaveId; // 从站地址
request[7] = 0x03; // 功能码
// 起始地址
request[8] = (byte)(startAddress >> 8); // High Byte
request[9] = (byte)(startAddress & 0xFF); // Low Byte
// 寄存器数量
request[10] = (byte)(registerCount >> 8); // High Byte
request[11] = (byte)(registerCount & 0xFF); // Low Byte
return request;
}
逻辑分析:
-
request[0]和request[1]表示事务标识符(Transaction ID),用于匹配请求与响应; -
request[2]和request[3]表示协议标识符(Protocol ID),Modbus TCP固定为0x0000; -
request[4]和request[5]表示后续PDU的长度,固定为0x0006; -
request[6]是从站地址,表示目标设备; -
request[7]是功能码0x03; -
request[8]和request[9]表示起始寄存器地址; -
request[10]和request[11]表示要读取的寄存器数量。
2.2.2 数据格式与字节序解析
Modbus协议中寄存器以16位(2字节)为单位进行传输,采用大端(Big-endian)字节序。
例如,若读取一个寄存器值为0x1234,则在响应报文中按顺序为:
[0x12, 0x34]
若需将两个字节转换为整数,C#代码如下:
short value = (short)((response[byteIndex] << 8) | response[byteIndex + 1]);
2.3 功能码0x04:读取输入寄存器
功能码0x04用于读取输入寄存器(Input Register),通常用于获取外部传感器或模拟量输入设备的数据。
2.3.1 输入寄存器与保持寄存器的差异
| 特性 | 输入寄存器(Input Register) | 保持寄存器(Holding Register) |
|---|---|---|
| 地址范围 | 30001 - 39999(逻辑地址) | 40001 - 49999(逻辑地址) |
| 读写权限 | 只读 | 可读可写 |
| 应用场景 | 外部传感器、模拟量输入 | 内部参数、设定值、控制输出 |
| 数据更新频率 | 实时更新 | 可由程序控制更新 |
2.3.2 实际应用场景与通信流程
输入寄存器通常用于工业现场中读取温度、压力、电压等模拟量数据。例如,在PLC中读取某个温度传感器的数据,其寄存器地址为30001(逻辑地址),对应物理地址为0x0000。
通信流程:
sequenceDiagram
主站->>从站: 发送功能码0x04请求(读取输入寄存器)
从站-->>主站: 返回指定寄存器的数值
C#代码示例:
byte[] BuildReadInputRegistersRequest(byte slaveId, ushort startAddress, ushort registerCount)
{
byte[] request = new byte[12];
request[0] = 0x00;
request[1] = 0x01;
request[2] = 0x00;
request[3] = 0x00;
request[4] = 0x00;
request[5] = 0x06;
request[6] = slaveId;
request[7] = 0x04; // 功能码0x04
request[8] = (byte)(startAddress >> 8);
request[9] = (byte)(startAddress & 0xFF);
request[10] = (byte)(registerCount >> 8);
request[11] = (byte)(registerCount & 0xFF);
return request;
}
该函数与功能码0x03类似,只是功能码字段设置为0x04。
2.4 功能码0x06:写入单个寄存器
功能码0x06用于向从站写入一个保持寄存器的值,常用于控制系统参数设定或输出控制。
2.4.1 写操作的报文格式
请求报文结构(主站发送):
| 字段名称 | 字节数 | 描述 |
|---|---|---|
| 从站地址 | 1 | 从站设备的唯一标识(0x01) |
| 功能码 | 1 | 固定为0x06 |
| 寄存器地址 | 2 | 要写入的寄存器地址 |
| 数据内容 | 2 | 要写入的16位整数值 |
响应报文结构(从站返回):
与请求相同,返回同样的报文结构以确认写入成功。
C#代码实现:
byte[] BuildWriteSingleRegisterRequest(byte slaveId, ushort registerAddress, ushort value)
{
byte[] request = new byte[12];
request[0] = 0x00;
request[1] = 0x01;
request[2] = 0x00;
request[3] = 0x00;
request[4] = 0x00;
request[5] = 0x06;
request[6] = slaveId;
request[7] = 0x06; // 功能码0x06
request[8] = (byte)(registerAddress >> 8);
request[9] = (byte)(registerAddress & 0xFF);
request[10] = (byte)(value >> 8); // 高字节
request[11] = (byte)(value & 0xFF); // 低字节
return request;
}
逻辑分析:
-
request[7]设置为0x06,表示写入单个寄存器; -
request[8]和request[9]表示目标寄存器地址; -
request[10]和request[11]表示要写入的值,使用大端方式存储。
2.4.2 数据一致性与错误反馈机制
写入操作成功后,从站将返回与请求相同的报文结构。若写入失败(如地址非法、寄存器只读等),从站将返回异常功能码(0x86),并附加错误代码。
错误响应示例:
| 字段名称 | 字节数 | 描述 |
|---|---|---|
| 从站地址 | 1 | 0x01 |
| 功能码 | 1 | 0x86(错误码) |
| 错误码 | 1 | 0x02(非法数据地址) |
异常处理建议:
在代码中应判断响应功能码是否为0x86,并根据错误码进行相应处理:
if (response[7] == 0x86)
{
byte errorCode = response[8];
Console.WriteLine($"写入失败,错误码:{errorCode:X2}");
}
至此,我们对Modbus协议中功能码0x03、0x04和0x06的报文结构、数据格式、通信流程及代码实现进行了深入分析。下一章节将继续探讨如何在C#中使用TcpClient与NetworkStream实现Modbus TCP通信。
3. C# TCP通信实现(TcpClient与NetworkStream)
3.1 C#网络编程基础
3.1.1 TcpClient类与NetworkStream的使用
在C#中, TcpClient 类是System.Net.Sockets命名空间下的核心类之一,用于实现基于TCP协议的客户端通信。它封装了底层Socket的复杂性,提供了更为简洁和易用的接口。 TcpClient 通常与 NetworkStream 类配合使用,用于在客户端与服务器之间发送和接收数据。
using System.Net.Sockets;
TcpClient client = new TcpClient();
client.Connect("192.168.1.100", 502); // 连接至IP地址为192.168.1.100的服务器,端口502
NetworkStream stream = client.GetStream();
代码解析:
- TcpClient client = new TcpClient(); 创建一个TCP客户端实例。
- client.Connect() 方法用于建立与远程服务器的连接。参数分别为目标IP地址和端口号。
- client.GetStream() 返回一个 NetworkStream 对象,用于后续的数据读写操作。
NetworkStream 类支持同步和异步的数据传输,通过 Write() 和 Read() 方法实现数据的发送与接收。
3.1.2 套接字通信的基本流程
TCP通信的基本流程包括以下几个关键步骤:
- 创建
TcpClient实例 - 连接到指定的服务器地址和端口
- 获取
NetworkStream对象 - 使用
NetworkStream.Write()发送数据 - 使用
NetworkStream.Read()接收数据 - 关闭连接和释放资源
这个流程适用于大多数基于TCP协议的通信场景,例如Modbus TCP通信。
表格:TcpClient与NetworkStream关键方法对比
| 类名 | 方法名 | 功能描述 |
|---|---|---|
| TcpClient | Connect() | 建立与远程主机的连接 |
| TcpClient | GetStream() | 获取用于通信的NetworkStream对象 |
| NetworkStream | Write() | 向流中写入数据 |
| NetworkStream | Read() | 从流中读取数据 |
| TcpClient | Close() | 关闭连接并释放资源 |
3.2 建立Modbus TCP连接
3.2.1 客户端连接服务器的实现步骤
在Modbus TCP通信中,客户端需要与PLC、HMI或其他Modbus设备建立TCP连接。连接过程如下:
- 指定服务器IP地址与端口号(通常为502)
- 使用
TcpClient尝试连接 - 检查连接状态以确保通信链路建立成功
try
{
TcpClient client = new TcpClient();
client.Connect("192.168.1.200", 502);
Console.WriteLine("Connected to Modbus TCP server.");
}
catch (Exception ex)
{
Console.WriteLine("Connection failed: " + ex.Message);
}
代码逻辑分析:
- 使用 try-catch 块捕获连接过程中可能出现的异常,如目标不可达、端口未开放等。
- 连接成功后,输出提示信息,便于调试和状态跟踪。
3.2.2 IP地址与端口号的配置方式
在实际开发中,IP地址和端口号通常通过配置文件或用户输入方式进行动态设置。例如:
string ipAddress = ConfigurationManager.AppSettings["ServerIP"];
int port = int.Parse(ConfigurationManager.AppSettings["Port"]);
或者通过命令行参数:
string[] args = Environment.GetCommandLineArgs();
string ipAddress = args[1];
int port = int.Parse(args[2]);
参数说明:
- ConfigurationManager.AppSettings 用于从App.config文件中读取配置项。
- Environment.GetCommandLineArgs() 用于获取命令行启动参数,便于在不同环境下灵活配置。
3.3 数据收发机制
3.3.1 发送请求数据包
Modbus TCP通信中,客户端需要构造符合协议规范的请求数据包。以下是一个发送0x03功能码(读保持寄存器)请求的示例:
byte[] request = new byte[]
{
0x00, 0x01, // 事务标识符
0x00, 0x00, // 协议标识符
0x00, 0x06, // 报文长度
0x01, // 单元标识符
0x03, // 功能码
0x00, 0x0A, // 起始地址
0x00, 0x01 // 寄存器数量
};
stream.Write(request, 0, request.Length);
Console.WriteLine("Request sent.");
数据包结构解析:
| 字段 | 字节数 | 说明 |
|---|---|---|
| 事务标识符 | 2 | 用于匹配请求与响应 |
| 协议标识符 | 2 | 通常为0x0000 |
| 报文长度 | 2 | 后续字节数 |
| 单元标识符 | 1 | 从设备地址 |
| 功能码 | 1 | 0x03(读保持寄存器) |
| 起始地址 | 2 | 要读取的寄存器起始地址 |
| 寄存器数量 | 2 | 要读取的寄存器数量 |
3.3.2 接收并解析响应数据
当客户端发送请求后,需等待服务器返回响应数据,并对其进行解析:
byte[] buffer = new byte[256];
int bytesRead = stream.Read(buffer, 0, buffer.Length);
// 解析响应数据
byte functionCode = buffer[7];
if (functionCode == 0x03)
{
int byteCount = buffer[8];
byte[] registerData = new byte[byteCount];
Array.Copy(buffer, 9, registerData, 0, byteCount);
for (int i = 0; i < registerData.Length; i += 2)
{
ushort value = BitConverter.ToUInt16(registerData, i);
Console.WriteLine("Register Value: " + value);
}
}
逻辑分析:
- stream.Read() 从流中读取响应数据。
- functionCode 验证是否为预期的功能码。
- Array.Copy() 提取有效数据部分。
- BitConverter.ToUInt16() 将两个字节转换为16位无符号整数。
3.4 通信稳定性与资源管理
3.4.1 连接状态的监控与维护
为了保证Modbus TCP通信的稳定运行,需要定期检查连接状态,并在断开时进行重连处理:
graph TD
A[启动客户端] --> B{连接状态检查}
B -- 已连接 --> C[正常通信]
B -- 未连接 --> D[尝试重连]
D --> E{重连成功?}
E -- 是 --> C
E -- 否 --> F[等待一段时间]
F --> D
流程说明:
- 定期通过 client.Connected 属性检查连接状态。
- 若连接断开,进入重连逻辑。
- 设置重连尝试次数和间隔时间,避免无限循环。
3.4.2 异常关闭与资源释放策略
在通信结束或出现异常时,应确保所有资源被正确释放,避免内存泄漏和连接未关闭的问题:
finally
{
if (stream != null)
stream.Close();
if (client != null)
client.Close();
Console.WriteLine("Resources released.");
}
资源管理策略:
- 使用 finally 块确保在任何情况下都会执行资源释放。
- 显式调用 Close() 方法释放 NetworkStream 和 TcpClient 对象。
- 在日志中记录资源释放信息,便于调试与监控。
表格:常见异常类型与处理建议
| 异常类型 | 原因说明 | 处理建议 |
|---|---|---|
| SocketException | 网络连接问题 | 重试连接、检查网络配置 |
| IOException | 流读写错误 | 检查流是否打开、重置连接 |
| TimeoutException | 超时 | 增加超时时间、重发请求 |
| InvalidOperationException | 无效操作状态 | 检查连接状态、重新初始化对象 |
总结:
本章详细讲解了使用C#实现Modbus TCP通信的关键技术,包括 TcpClient 与 NetworkStream 的使用、Modbus连接建立、数据收发机制、通信稳定性与资源管理。通过代码示例、表格对比和流程图展示,帮助开发者全面掌握C#网络编程在Modbus通信中的应用实践。
4. Modbus报文格式构建与校验计算
Modbus TCP协议的核心在于其标准化的报文结构与数据校验机制。在工业自动化系统中,设备间的通信依赖于精确的报文格式与可靠的校验算法,以确保数据的完整性和通信的稳定性。本章将深入探讨Modbus TCP报文的组成结构、构建流程、校验机制以及数据格式转换等关键技术环节。
4.1 Modbus TCP报文结构详解
4.1.1 MBAP头与功能码数据区的组成
Modbus TCP协议在TCP/IP协议栈上运行,其核心报文由MBAP(Modbus Application Protocol)头和功能码数据区组成。MBAP头负责标识事务、协议版本、报文长度和设备标识,而功能码数据区则包含实际的命令与数据。
MBAP头字段结构如下:
| 字段名称 | 长度(字节) | 描述说明 |
|---|---|---|
| 事务标识符(Transaction ID) | 2 | 用于匹配请求与响应的唯一标识符 |
| 协议标识符(Protocol ID) | 2 | 固定为0x0000,表示Modbus协议 |
| 报文长度(Length) | 2 | 后续字节数,包括Unit ID和数据字段 |
| 单元标识符(Unit ID) | 1 | 目标从站设备的地址 |
功能码数据区 则由功能码和相关参数构成。例如,在功能码0x03(读保持寄存器)中,数据区包含寄存器起始地址和读取数量。
以下是一个Modbus TCP请求报文的16进制示例:
00 01 00 00 00 06 01 03 00 00 00 0A
-
00 01:事务标识符(Transaction ID) -
00 00:协议标识符(Protocol ID) -
00 06:报文长度(6字节,包括Unit ID和数据) -
01:单元标识符(Unit ID) -
03:功能码(Function Code) -
00 00:起始地址(Start Address) -
00 0A:读取寄存器数量(Number of Registers)
4.1.2 报文长度与事务标识的设置
事务标识符(Transaction ID)用于匹配客户端发出的请求与服务器返回的响应,通常由客户端递增生成。该字段为2字节,最大值为65535,超过后重新从0开始。
报文长度(Length)字段表示MBAP头之后的数据总长度,包括Unit ID和功能码数据区。例如,功能码0x03请求中,Unit ID为1字节,功能码为1字节,地址为2字节,数量为2字节,总长度为6字节,因此Length字段为 00 06 。
4.2 报文构建流程
4.2.1 请求报文的组装方法
在C#中,Modbus TCP请求报文的构建通常使用 byte[] 数组进行手动拼接。以下是一个构建功能码0x03请求报文的示例代码:
public byte[] BuildReadHoldingRegistersRequest(byte unitId, ushort startAddress, ushort numberOfRegisters)
{
byte[] request = new byte[12]; // MBAP头(7字节) + 功能码数据(5字节)
// 设置事务标识符(递增)
byte[] transactionId = BitConverter.GetBytes((ushort)1);
Array.Copy(transactionId, 0, request, 0, 2);
// 协议标识符固定为0x0000
request[2] = 0x00;
request[3] = 0x00;
// 报文长度(后续字节数)
request[4] = 0x00;
request[5] = 0x06; // Unit ID (1) + Function Code (1) + Start Address (2) + Register Count (2)
// 单元标识符
request[6] = unitId;
// 功能码
request[7] = 0x03;
// 起始地址
byte[] startAddressBytes = BitConverter.GetBytes(startAddress);
Array.Copy(startAddressBytes, 0, request, 8, 2);
// 寄存器数量
byte[] countBytes = BitConverter.GetBytes(numberOfRegisters);
Array.Copy(countBytes, 0, request, 10, 2);
return request;
}
逐行分析:
- 第1行 :定义方法,传入Unit ID、起始地址和寄存器数量。
- 第2行 :初始化12字节的字节数组,用于存储完整的Modbus TCP请求报文。
- 第5-6行 :设置事务标识符,使用
BitConverter.GetBytes将ushort转换为byte数组。 - 第9-10行 :设置协议标识符为
0x0000。 - 第13-14行 :设置报文长度为6字节,包括Unit ID和功能码数据区。
- 第17行 :设置Unit ID。
- 第20行 :设置功能码为0x03。
- 第23-24行 :将起始地址转换为byte数组并复制到请求报文的相应位置。
- 第27-28行 :将寄存器数量转换为byte数组并复制到报文。
4.2.2 响应报文的解析策略
Modbus TCP响应报文的解析主要涉及MBAP头和功能码数据区的提取。以下是一个解析功能码0x03响应报文的示例:
public List<ushort> ParseReadHoldingRegistersResponse(byte[] response)
{
List<ushort> registers = new List<ushort>();
// 检查功能码是否为0x03
if (response[7] != 0x03)
{
throw new Exception("Invalid function code in response.");
}
// 获取字节数量
int byteCount = response[8];
// 读取寄存器值
for (int i = 0; i < byteCount; i += 2)
{
ushort value = BitConverter.ToUInt16(response, 9 + i);
registers.Add(value);
}
return registers;
}
逐行分析:
- 第1行 :定义解析方法,输入为响应字节数组。
- 第4-6行 :验证响应报文是否为功能码0x03。
- 第9行 :获取寄存器数据的总字节数。
- 第12-16行 :循环读取每个寄存器的值,使用
BitConverter.ToUInt16将两个字节转换为ushort。
4.3 校验计算机制
4.3.1 CRC16校验算法原理
Modbus RTU使用CRC16校验算法,而Modbus TCP由于运行在TCP之上,已具备错误检测机制,因此不使用CRC校验。但在Modbus RTU或串口通信中,CRC16用于校验数据完整性。
CRC16算法基于多项式 0xA001 (即 x^16 + x^15 + x^2 + 1 ),其计算过程如下:
graph TD
A[初始化CRC寄存器为0xFFFF] --> B[读取一个字节]
B --> C[与CRC寄存器低字节异或]
C --> D[CRC寄存器右移一位]
D --> E[判断最低位是否为1]
E -->|是| F[CRC寄存器异或0xA001]
E -->|否| G[继续右移]
F --> H[重复处理剩余位]
G --> H
H --> I[处理下一个字节]
I --> J[所有字节处理完毕,返回CRC值]
4.3.2 校验值的计算与验证流程
以下是Modbus RTU中CRC16校验的实现代码:
public static byte[] ComputeCRC(byte[] data)
{
ushort crc = 0xFFFF;
foreach (byte b in data)
{
crc ^= b;
for (int i = 0; i < 8; i++)
{
if ((crc & 0x0001) != 0)
{
crc >>= 1;
crc ^= 0xA001;
}
else
{
crc >>= 1;
}
}
}
return new byte[] { (byte)(crc >> 8), (byte)(crc & 0xFF) };
}
逐行分析:
- 第1行 :定义CRC计算方法,输入为字节数组。
- 第2行 :初始化CRC寄存器为0xFFFF。
- 第5-15行 :对每个字节进行CRC计算,依次处理每个bit。
- 第18行 :返回CRC值,高字节在前。
在发送或接收数据包时,应将CRC值附加在数据末尾以进行验证。
4.4 数据格式转换与字节序处理
4.4.1 整型、浮点型等数据类型的转换
在Modbus通信中,设备之间传输的数据通常为字节数组。因此,需要将字节数组转换为C#中的基本数据类型。例如:
byte[] data = new byte[] { 0x12, 0x34 };
ushort value = BitConverter.ToUInt16(data, 0); // 输出0x3412
注意: 在C#中, BitConverter 默认使用小端序(Little Endian),即低位字节在前。
4.4.2 大端与小端模式的兼容性处理
Modbus设备可能使用大端或小端模式存储数据。为确保兼容性,需在通信中处理字节序问题。
例如,将大端序的字节数组转换为ushort:
public static ushort ToUInt16BigEndian(byte[] data, int offset)
{
if (BitConverter.IsLittleEndian)
{
Array.Reverse(data, offset, 2); // 反转字节顺序
}
return BitConverter.ToUInt16(data, offset);
}
逐行分析:
- 第1行 :定义方法,用于大端序转换。
- 第4-6行 :如果系统为小端序,则反转字节顺序。
- 第7行 :将字节数组转换为ushort类型。
总结:
本章详细介绍了Modbus TCP报文的构建与校验机制,包括MBAP头结构、事务标识符与报文长度设置、请求报文组装与响应解析流程、CRC16校验算法的实现以及字节序处理。通过本章的学习,开发者可以掌握Modbus通信中关键的报文构造与数据处理方法,为后续的通信实现与优化打下坚实基础。
5. 异步编程模型在Modbus通信中的应用(async/await)
在现代工业自动化系统中,Modbus通信往往需要处理多个并发设备请求、长时间等待响应、资源竞争等复杂场景。传统的同步编程方式容易导致线程阻塞,降低系统吞吐量和响应速度。因此,采用异步编程模型(async/await)来实现Modbus通信成为提升系统性能与稳定性的关键手段。本章将从C#异步编程基础出发,逐步深入到异步Modbus通信的实现方式,并探讨如何通过异步设计提高通信效率。
5.1 C#异步编程基础
5.1.1 async/await关键字的使用方式
C#中的 async 和 await 关键字为异步编程提供了简洁而强大的语法支持。它们允许开发者以同步的方式编写异步代码,从而提高代码的可读性和可维护性。
以下是一个简单的异步方法示例:
public async Task<int> FetchDataAsync()
{
HttpClient client = new HttpClient();
string result = await client.GetStringAsync("https://example.com/data");
return result.Length;
}
代码解析:
-
async Task<int>:表示这是一个异步方法,返回一个Task<int>类型的结果。 -
await client.GetStringAsync(...):调用异步方法获取字符串数据,不会阻塞当前线程。 - 当前方法在遇到
await表达式时会立即返回一个未完成的Task,待异步操作完成后继续执行后续逻辑。
参数说明:
-
HttpClient.GetStringAsync(string requestUri):该方法用于发起异步HTTP请求,返回一个包含响应内容的字符串的Task<string>。
异步优势:
- 避免UI线程阻塞,保持应用程序响应性。
- 提高服务器端吞吐量,减少线程池资源浪费。
5.1.2 同步与异步调用的区别
| 特性 | 同步调用 | 异步调用 |
|---|---|---|
| 线程占用 | 阻塞当前线程直至完成 | 不阻塞线程,释放当前线程 |
| 响应性 | 易造成界面冻结 | 提升应用程序响应性 |
| 资源消耗 | 线程等待浪费资源 | 利用I/O完成端口等机制减少资源消耗 |
| 代码复杂度 | 简单直观 | 需要处理Task、await、异常捕获等 |
| 适用场景 | 简单操作、计算密集型任务 | 网络请求、文件读写、长时间等待 |
逻辑分析:
在Modbus通信中,尤其是通过TCP协议进行数据交换时,网络延迟是常见的问题。使用同步方法会导致主线程或工作线程被阻塞,无法响应其他请求或事件。而采用异步方法则可以让线程在等待网络响应时释放出来处理其他任务,从而提升整体系统性能。
5.2 异步Modbus通信实现
5.2.1 使用异步方法发送与接收数据
在Modbus TCP通信中,发送请求与接收响应是两个关键操作。使用 NetworkStream 类的异步方法可以实现非阻塞的数据传输。
以下是一个异步发送与接收Modbus请求的示例:
private async Task<byte[]> SendAndReceiveAsync(byte[] request, CancellationToken token)
{
using (var client = new TcpClient())
{
await client.ConnectAsync("192.168.0.100", 502, token);
using (var stream = client.GetStream())
{
// 异步发送请求
await stream.WriteAsync(request, 0, request.Length, token);
// 准备接收缓冲区
byte[] buffer = new byte[256];
int bytesRead = await stream.ReadAsync(buffer, 0, buffer.Length, token);
// 返回实际接收到的数据
return buffer.Take(bytesRead).ToArray();
}
}
}
代码解析:
-
await client.ConnectAsync(...):异步建立TCP连接,避免阻塞主线程。 -
await stream.WriteAsync(...):异步发送Modbus请求报文。 -
await stream.ReadAsync(...):异步等待服务器响应。 -
token:用于支持取消操作,避免长时间阻塞。
逻辑分析:
- 使用
async/await结构,可以确保网络通信不会阻塞UI线程,适用于GUI应用程序或Web服务。 -
CancellationToken参数允许在用户取消请求或超时时终止异步操作,提升程序的可控制性。 -
using语句确保资源在使用完毕后自动释放,避免内存泄漏。
5.2.2 异步任务的异常处理机制
在异步编程中,异常处理尤为重要。异步方法中抛出的异常不会立即触发,而是被封装在 Task 对象中,必须通过 try/catch 捕获。
示例如下:
public async Task ProcessModbusRequestAsync()
{
try
{
byte[] response = await SendAndReceiveAsync(requestPacket, token);
HandleResponse(response);
}
catch (OperationCanceledException)
{
Console.WriteLine("请求已被取消");
}
catch (IOException ex)
{
Console.WriteLine($"网络通信错误: {ex.Message}");
}
catch (Exception ex)
{
Console.WriteLine($"未知错误: {ex.Message}");
}
}
参数说明:
-
OperationCanceledException:在取消操作时抛出。 -
IOException:网络连接失败、断开等情况触发。 -
Exception:通用异常捕获,防止程序崩溃。
流程图示意:
graph TD
A[开始异步Modbus通信] --> B[发送请求]
B --> C{请求是否成功?}
C -->|是| D[接收响应]
C -->|否| E[捕获异常]
D --> F{响应是否正常?}
F -->|是| G[处理数据]
F -->|否| H[记录错误并重试]
E --> I[根据异常类型处理]
G --> J[结束]
H --> J
I --> J
逻辑分析:
- 在异步Modbus通信中,异常可能发生在连接、发送、接收等任何阶段。
- 通过结构化的异常捕获机制,可以区分不同的错误类型并进行针对性处理。
- 结合
CancellationToken,可以实现超时或用户取消请求的优雅退出。
5.3 提高通信效率的异步设计
5.3.1 并发请求与响应的处理方式
在工业现场,通常需要同时与多个Modbus从站设备通信。传统的串行请求方式效率低下,而使用异步并发请求则能显著提升性能。
以下示例展示了如何使用 Task.WhenAll 并发处理多个Modbus请求:
public async Task<List<byte[]>> SendMultipleRequestsAsync(List<byte[]> requests)
{
var tasks = new List<Task<byte[]>>();
foreach (var request in requests)
{
tasks.Add(SendAndReceiveAsync(request, token));
}
byte[][] results = await Task.WhenAll(tasks);
return results.ToList();
}
代码解析:
-
tasks.Add(...):将每个请求包装成一个Task<byte[]>任务。 -
await Task.WhenAll(tasks):并发执行所有任务,并等待全部完成。 - 返回值是一个包含所有响应数据的列表。
参数说明:
-
requests:包含多个Modbus请求报文的字节数组集合。 -
token:用于取消操作的令牌,确保并发任务可被中断。
逻辑分析:
- 异步并发请求可以充分利用网络带宽,减少总通信时间。
- 使用
Task.WhenAll可保证所有任务完成后统一处理结果。 - 适用于多设备数据采集、分布式控制系统等场景。
5.3.2 异步超时与取消机制的实现
在实际应用中,某些设备可能无法及时响应,或者由于网络波动导致通信失败。为防止程序长时间阻塞,应为异步请求添加超时与取消机制。
以下是一个带超时控制的异步请求示例:
public async Task<byte[]> SendWithTimeoutAsync(byte[] request, int timeoutMs)
{
using (var cts = new CancellationTokenSource())
{
var task = SendAndReceiveAsync(request, cts.Token);
var delay = Task.Delay(timeoutMs, cts.Token);
var result = await Task.WhenAny(task, delay);
if (result == delay)
{
cts.Cancel();
throw new TimeoutException("Modbus通信超时");
}
return await task;
}
}
代码解析:
-
CancellationTokenSource:用于管理取消操作。 -
Task.WhenAny(task, delay):等待任务完成或超时发生。 - 如果超时发生,取消令牌被触发,抛出
TimeoutException。
参数说明:
-
timeoutMs:设定的超时时间(单位:毫秒)。 -
cts.Cancel():取消正在进行的任务。
逻辑分析:
- 异步超时机制可以防止程序因设备无响应而陷入死循环。
- 使用
CancellationToken可以优雅地中止未完成的异步任务。 - 适用于对实时性要求较高的工业控制系统。
通过本章的讲解,我们了解了异步编程在Modbus通信中的重要性,并掌握了如何使用 async/await 实现高效的Modbus客户端通信。下一章将围绕功能码0x03的实际应用展开,详细介绍如何在C#中实现离散输入的读取操作。
6. 功能码0x03读离散输入实现
6.1 功能码0x03的业务逻辑设计
6.1.1 数据请求的构造逻辑
功能码0x03用于读取保持寄存器中的数据,常用于获取传感器、仪表等设备的状态信息。其请求报文包含以下字段:
| 字段名 | 长度(字节) | 描述 |
|---|---|---|
| 事务标识符(TID) | 2 | 标识事务,客户端递增 |
| 协议标识符(PID) | 2 | 通常为0x0000 |
| 长度(Length) | 2 | 后续数据字节数(含单元ID) |
| 单元标识符(UID) | 1 | 从站设备地址 |
| 功能码(Function) | 1 | 0x03,表示读取保持寄存器 |
| 起始地址(Start) | 2 | 寄存器起始地址(高位在前) |
| 寄存器数量(Qty) | 2 | 要读取的寄存器数量(高位在前) |
构造请求报文时,需确保数据顺序正确,并进行字节序转换。
6.1.2 返回数据的解析与封装
响应报文结构如下:
| 字段名 | 长度(字节) | 描述 |
|---|---|---|
| 事务标识符(TID) | 2 | 对应请求中的TID |
| 协议标识符(PID) | 2 | 通常为0x0000 |
| 长度(Length) | 2 | 后续数据字节数(含单元ID) |
| 单元标识符(UID) | 1 | 从站设备地址 |
| 功能码(Function) | 1 | 0x03 |
| 字节数(Byte Count) | 1 | 后续数据字节数 |
| 数据(Data) | N | 实际读取到的寄存器数据 |
数据字段中每两个字节表示一个16位整型寄存器值。解析时需注意字节序(大端或小端),并根据需要转换为整型、浮点型等。
6.2 在C#中实现0x03功能码通信
6.2.1 数据发送与接收代码实现
以下为C#中使用 TcpClient 与 NetworkStream 实现功能码0x03读取保持寄存器的代码示例:
using System;
using System.Net.Sockets;
using System.Threading.Tasks;
public class ModbusClient
{
private TcpClient _client;
private NetworkStream _stream;
public async Task ConnectAsync(string ip, int port)
{
_client = new TcpClient();
await _client.ConnectAsync(ip, port);
_stream = _client.GetStream();
}
public async Task<byte[]> ReadHoldingRegistersAsync(byte unitId, ushort startAddress, ushort quantity)
{
byte[] request = BuildReadRequest(unitId, startAddress, quantity);
await _stream.WriteAsync(request, 0, request.Length);
byte[] response = new byte[256]; // 根据实际响应大小调整
int bytesRead = await _stream.ReadAsync(response, 0, response.Length);
return ParseResponse(response, bytesRead, quantity);
}
private byte[] BuildReadRequest(byte unitId, ushort startAddress, ushort quantity)
{
byte[] request = new byte[12]; // 固定12字节MBAP头 + 6字节功能码数据
// 事务标识符递增
BitConverter.GetBytes((ushort)1).CopyTo(request, 0);
// 协议标识符为0
BitConverter.GetBytes((ushort)0).CopyTo(request, 2);
// 长度为6 + 1(单元ID)
BitConverter.GetBytes((ushort)6).CopyTo(request, 4);
// 单元ID
request[6] = unitId;
// 功能码0x03
request[7] = 0x03;
// 起始地址
BitConverter.GetBytes(startAddress).CopyTo(request, 8);
// 寄存器数量
BitConverter.GetBytes(quantity).CopyTo(request, 10);
return request;
}
private byte[] ParseResponse(byte[] response, int length, ushort quantity)
{
// 检查功能码是否为0x03
if (response[7] != 0x03)
throw new Exception("Invalid function code in response.");
int byteCount = response[8];
byte[] data = new byte[byteCount];
Array.Copy(response, 9, data, 0, byteCount);
return data;
}
public void Disconnect()
{
_stream?.Close();
_client?.Close();
}
}
6.2.2 数据解析与错误码处理
在 ParseResponse 方法中,我们首先检查返回的功能码是否一致,然后提取数据字段。如果响应中包含异常码(如功能码高位置位),则需进行特殊处理:
if (response[7] == 0x83) // 0x80 + 0x03 表示异常响应
{
byte exceptionCode = response[8];
throw new Exception($"Modbus Exception: Code {exceptionCode}");
}
此外,应设置合理的超时时间,并在读取失败时进行重试机制:
_stream.ReadTimeout = 1000;
6.3 离散输入读取的典型应用
6.3.1 工业现场传感器状态采集
功能码0x03广泛用于采集现场传感器的数据,如温度、压力、液位等。例如,某PLC设备将温度传感器的值写入保持寄存器地址40001(即地址0x0000),每次读取2个寄存器(4字节)表示一个浮点数:
var data = await client.ReadHoldingRegistersAsync(1, 0, 2);
float temperature = BitConverter.ToSingle(data, 0);
Console.WriteLine($"Temperature: {temperature} °C");
6.3.2 与PLC设备的通信实践
在与西门子、欧姆龙等PLC通信时,需根据设备手册确定寄存器地址和数据类型。例如,读取PLC的模拟量输入:
// 读取PLC地址为40010(即0x0009)的两个寄存器
var data = await client.ReadHoldingRegistersAsync(1, 9, 2);
ushort rawValue = BitConverter.ToUInt16(data, 0);
float voltage = rawValue / 100.0f; // 假设为电压值,单位V
6.4 通信优化与性能提升
6.4.1 批量读取与并发处理
为提高通信效率,可将多个读取请求合并为一次批量读取。例如,读取多个寄存器地址连续的数据:
var data = await client.ReadHoldingRegistersAsync(1, 0, 10); // 读取10个寄存器
for (int i = 0; i < 10; i += 2)
{
float value = BitConverter.ToSingle(data, i * 2);
Console.WriteLine($"Register {i}: {value}");
}
此外,使用异步并发处理多个请求:
var task1 = client.ReadHoldingRegistersAsync(1, 0, 2);
var task2 = client.ReadHoldingRegistersAsync(1, 2, 2);
await Task.WhenAll(task1, task2);
6.4.2 超时重试与连接保持策略
为增强通信稳定性,建议设置合理的超时和重试机制:
int retryCount = 3;
for (int i = 0; i < retryCount; i++)
{
try
{
var data = await client.ReadHoldingRegistersAsync(1, 0, 2);
break;
}
catch (Exception ex)
{
if (i == retryCount - 1)
throw;
await Task.Delay(500); // 等待后重试
}
}
同时,保持连接活跃状态,可定期发送心跳包:
while (true)
{
await Task.Delay(5000);
await client.KeepAliveAsync(); // 自定义方法发送心跳
}
简介:Modbus TCP是一种广泛应用于工业自动化系统的通信协议,基于TCP/IP实现设备间数据交换。本文详细讲解如何使用C#语言开发一个功能完整的Modbus TCP客户端。内容涵盖Modbus协议基础、TCP通信实现、报文构造与解析、功能码操作、异步编程、异常处理、性能优化以及实际应用场景。通过本项目,开发者可以掌握工业通信开发的核心流程,并提升C#网络编程能力。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









