







 这篇博客记录了一次计算机操作系统实验,通过C语言模拟实现进程的创建、查看、换出、杀死等功能。实验旨在理解进程概念,掌握进程控制,并通过进程控制块(PCB)管理进程状态。文中详细介绍了实现思路,包括使用两个链表分别表示执行和阻塞状态的进程,并提供了部分源代码文件名。
这篇博客记录了一次计算机操作系统实验,通过C语言模拟实现进程的创建、查看、换出、杀死等功能。实验旨在理解进程概念,掌握进程控制,并通过进程控制块(PCB)管理进程状态。文中详细介绍了实现思路,包括使用两个链表分别表示执行和阻塞状态的进程,并提供了部分源代码文件名。
计算机操作系统实验一模拟进程管理(C语言)
这星期开始上计算机操作系统的实验课,打算把每个实验的内容和思路记录一下
实验目的
1、 理解进程的概念,明确进程和程序的区别。
2、 理解并发执行的实质。
3、 掌握进程的创建、睡眠、撤销等进程控制方法。
实验内容与基本要求
用C,C++等语言编写程序,模拟实现创建新的进程;查看运行进程;换出某个进程;杀死进程等功能。
实验报告内容
1.进程、进程控制块等的基本原理
a.为了能使程序并发执行,并且可以对并发执行的程序加以描述和控制,引入了“进程”的概念。它是资源分配和独立运行的基本单位。
b.进程控制块(PCB)是操作系统为进程配置的一个专门的数据结构。系统利用PCB来描述进程的基本情况和活动过程,进而控制和管理进程。
进程PCB可以包含
/*
|进程ID|
|进程优先级|
|进程大小(进程执行时间|
|进程内容|
|进程状态|
|指针|
*/
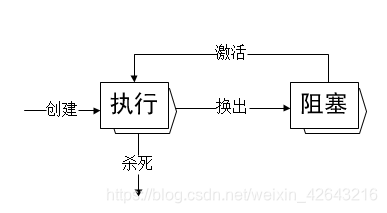
2.进程过程图
以传统菜单的形式呈现功能。
1.创建新的进程 2.查看运行进程”
3.换出某个进程 4.杀死运行进程”
5.唤醒某个进程 6.退出程序 “
实现思路及功能分析
系统利用进程控制块(Process Control Block,PCB)来描述系统的基本情况和活动过程,要进行进程管理,实际上就是在操作进程的PCB。因此要求模拟进程管理,首先要模拟出PCB的结构,再实现它的创建、撤销等操作。
一般来说,进程拥有三种基本状态:就绪、执行、阻塞。在引入了挂起原语操作后,还会细分为活动就绪、静止就绪、活动阻塞、静止阻塞。在我的理解中,活动与静止的区别就是,活动时进程是在主存中的,而静止时进程已经被调到了辅存里。
在单处理机系统中,只有一个进程处于执行状态,而在多处理机系统中,能有多个进程处于执行状态。因此在这里我们不将执行状态与就绪状态特别区分开来,只设置两个链表,一个链表用于保存处于执行(或就绪)状态的进程,一个链表用于保存处于阻塞状态的进程。
当然,如果想模拟单处理机系统的话,也可以将处于就绪状态链表的第一个结点默认设置为执行状态,当有优先度更高的进程时,让它成为执行状态,插入链表头部,原有的第一个结点转为就绪状态即可。但是本实验中不涉及优先级调度的算法,所以就简化处理了。
同样,我们模拟内存的大小,例如理论上可以同时运行20个进程,那么将处于执行状态的进程转为阻塞状态时,可以看做把它转移到了辅存中。但是不区分活动阻塞、静止阻塞,只是简单地设置成运行进程个数的变化。
总的来说,我们这次试验的思路是
- 设置两个单链表,一个用于存储运行的进程,一个用于存储阻塞状态的进程
- 默认内存中可以存放最多20个进程,将处于运行队列的进程看作在内存中,阻塞状态不在内存中
- 进程创建,则去申请内存空间,填写完进程信息后直接加入运行队列
- 杀死进程,则将进程从运行队列中删除,并直接释放
- 进程的换出与唤醒,就是让进程在运行队列与阻塞队列之间转换(进程自己的状态也发生改变)
- 为了操作简便,额外写了几个辅助函数来使用
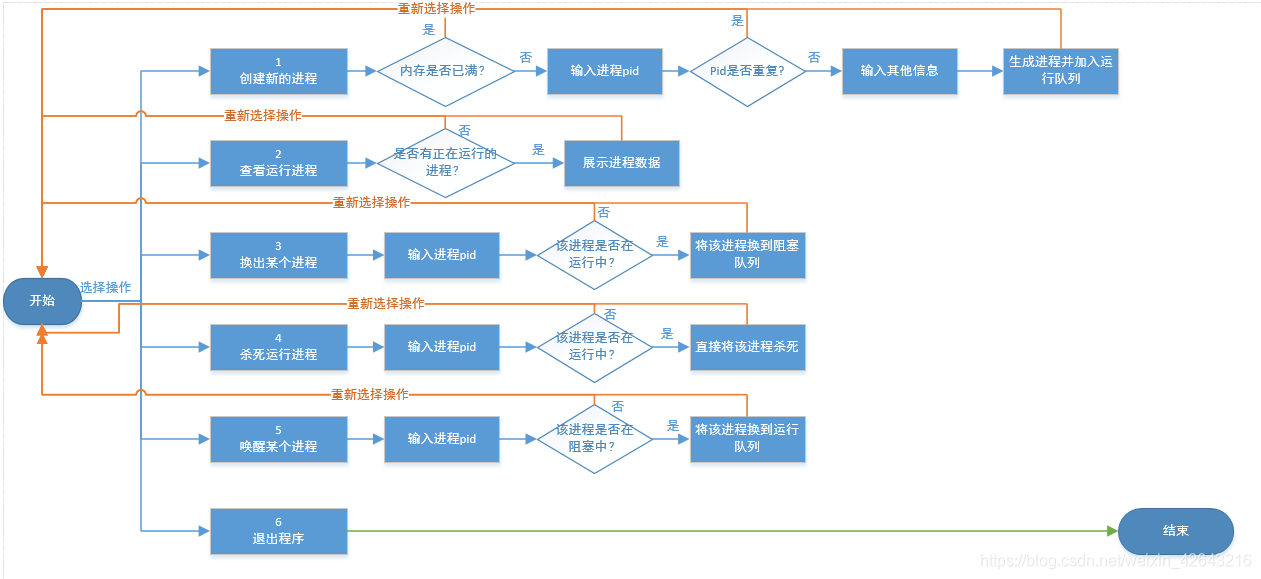
流程图
全部代码
工程图
ProcessControl.h
//
// ProcessControl.h
// ProcessControlTest
//
// Created by Apple on 2019/10/13.
// Copyright © 2019 Yao YongXin. All rights reserved.
//
#ifndef ProcessControl_h
#define ProcessControl_h
#include <stdio.h>
#include <stdlib.h>
#include <assert.h>
//最大内存的大小
#define MAX_SIZE 20
//线程状态:运行(就绪) 阻塞
enum process_type{
process_type_running = 1000,
process_type_block = -1000,
process_type_ready = 500
};
//进程控制块结构体
typedef struct PCB_Type{
//进程的id
int pid;
//进程的优先级
int priority;
//进程大小(执行时间)
int size;
//进程内容
char content[20];
//进程的状态 执行 阻塞
int state;
//下一个要执行的进程
struct PCB_Type *next;
}PCB;
//创建新的进程
void create(PCB *running_list,PCB *block_list,int *size);
//查看运行进程
void show_running(PCB *running_list);
//换出某个进程
void change(PCB *running_list,PCB *block_list,int *size);
//杀死运行进程
void killed(PCB *running_list,int *size);
//唤醒某个进程
void wake_up(PCB *running_list,PCB *block_list,int *size);
//判断在运行(就绪)队列中是否存在有该pid值的进程 0->不存在 1->存在
int exist_in_running(PCB *running_list,int pid);
//判断在阻塞队列中是否存在有该pid值的进程 0->不存在 1->存在
int exist_in_block(PCB *block_list,int pid);
//通过pid寻找进程的位置(返回其前一个结点的地址
PCB *find(PCB *list,int pid);
#endif /* ProcessControl_h */
ProcessControl.c
//
// ProcessControl.c
// ProcessControlTest
//
// Created by Apple on 2019/10/13.
// Copyright © 2019 Yao YongXin. All rights reserved.
//
#include "ProcessControl.h"
//创建新的进程
void create(PCB *running_list,PCB *block_list, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









