




 本文详细介绍了SIFT(尺度不变特征转换)算法,包括算法概述、尺度空间、高斯金字塔、DOG空间极值检测、关键点方向匹配、关键点描述和关键点匹配。通过实验展示了SIFT在图像特征提取和匹配中的优势,与其他算法(如Harris)的比较,以及在图像检索和地理标记匹配中的应用。同时,探讨了RANSAC算法在滤除误匹配对中的作用,通过实例分析了不同场景下RANSAC的效果。实验表明SIFT算法在旋转、尺度缩放和亮度变化下具有不变性,是图像处理中的强大工具。
本文详细介绍了SIFT(尺度不变特征转换)算法,包括算法概述、尺度空间、高斯金字塔、DOG空间极值检测、关键点方向匹配、关键点描述和关键点匹配。通过实验展示了SIFT在图像特征提取和匹配中的优势,与其他算法(如Harris)的比较,以及在图像检索和地理标记匹配中的应用。同时,探讨了RANSAC算法在滤除误匹配对中的作用,通过实例分析了不同场景下RANSAC的效果。实验表明SIFT算法在旋转、尺度缩放和亮度变化下具有不变性,是图像处理中的强大工具。
1、SIFT算法简介
1.1 算法概述
SIFT全称尺度不变特征转换。它用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量。SIFT算法的实质可以归为在不同 尺度空间 上查找 特征点(关键点) 的问题。
1.2 相关概念
1.2.1 关键点
关键点是指一些十分突出的点,这些点不会因光照、尺度、旋转等因素的改变而消失,比如角点、边缘点、暗区域的亮点以及亮区域的暗点。
1.2.2 尺度空间
概念:
尺度空间理论最早于1962年提出,其主要思想是通过对原始图像进行尺度变换,获得图像多尺度下的空间表示。从而实现边缘、角点检测和不同分辨率上的特征提取,以满足特征点的尺度不变性。
表示:
SIFT算法在构建尺度空间时采取高斯核函数进行滤波,使原始图像保存最多的细节特征,经过高斯滤波后细节特征逐渐减少来模拟大尺度情况下的特征表示。利用高斯核函数进行滤波的主要原因有两个:
(1)高斯核函数是唯一的尺度不变核函数。
(2)DoG核函数可以近似为LoG函数,这样可以使特征提取更简单。
一个图像的尺度空间L(x, y, σ) ,定义为原始图像 I(x, y)与一个可变尺度的2维高斯函数G(x, y, σ) 卷积运算。公式如下:
其中*表示卷积运算,(x,y)代表图像的像素位置。是尺度空间因子,值越小表示图像被平滑的越少,相应的尺度也就越小。大尺度对应于图像的概貌特征,小尺度对应于图像的细节特征。
1.2.3 高斯金字塔
构建:
尺度空间在实现时使用高斯金字塔表示,高斯金字塔的构建分为两步:
(1)对图像做高斯平滑。
(2)对图像做降采样。
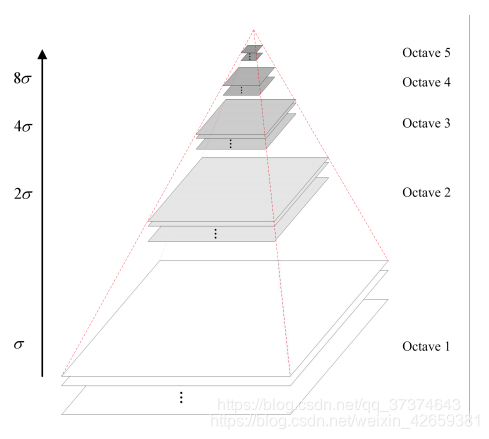
为了让尺度体现其连续性,高斯金字塔在简单降采样的基础上加上了高斯滤波。如上图所示,将图像金字塔每层的一张图像使用不同参数做高斯模糊,Octave表示一幅图像可产生的图像组数,Interval表示一组图像包括的图像层数。
表示:
高斯图像金字塔共o组、s层,则有:
σ:尺度空间坐标;s:sub-level层坐标;σ0:初始尺度;S:每组层数(一般为3~5)
最后可将组内和组间尺度归为:
i:金字塔组数;n:每一组的层数
1.2.4 DOG空间极值检测
DOG函数:

DOG高斯差分金字塔:
(1)对应DOG算子,需构建DOG金字塔。
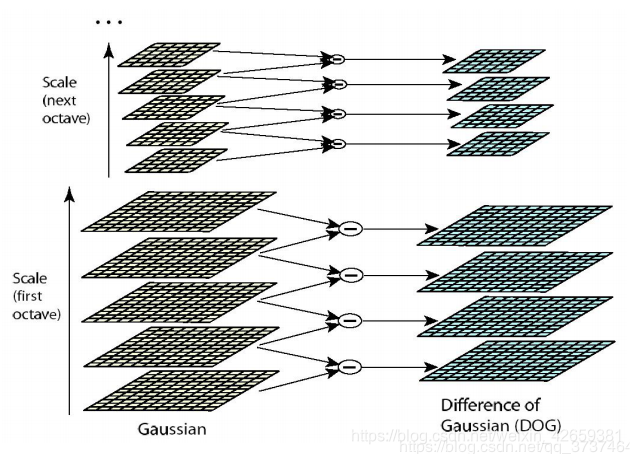
可以通过高斯差分图像看出图像上的像素值变化情况。(如果没有变化,也就没有特征。特征必须是变化尽可能多的点。)DOG图像描绘的是目标的轮廓。
(2)DOG局部极值检测
特征点是由DOG空间的局部极值点组成的。为了寻找DoG函数的极值点,每一个像素点要和它所有的相邻点比较,看其是否比它的图像域和尺度域的相邻点大或者小。
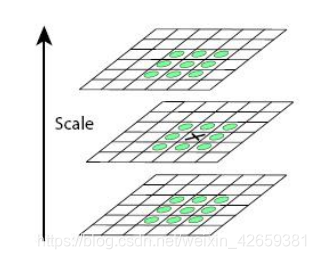
中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个
点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。
去除边缘响应:
由于DoG函数在图像边缘有较强的边缘响应,因此需要排除边缘响应。DoG函数的峰值点在边缘方向有较大的主曲率,而在垂直边缘的方向有较小的主曲率。主曲率可以通过计算在该点位置尺度的2×2的Hessian矩阵得到,导数由采样点相邻差来估计:
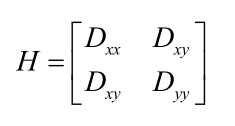
Dxx 表示DOG金字塔中某一尺度的图像x方向求导两次。
D的主曲率和H的特征值成正比。令 α ,β为特征值,则
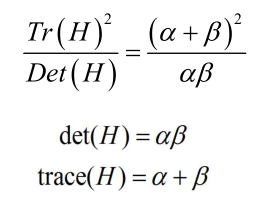
该值在两特征值相等时达最小。Lowe论文中建议阈值T为1.2,即
时保留,反之剔除。
1.2.5 关键点方向匹配
通过尺度不变性求极值点,可以使其具有缩放不变的性质。而利用关键点邻域像素的梯度方向分布特性,可以为每个关键点指定方向参数方向,从而使描述子对图像旋转具有不变性。通过求每个极值点的梯度来为极值点赋予方向。像素点的梯度表示:

1.2.6 关键点描述
对于每一个关键点,都拥有位置、尺度以及方向三个信息。为每个关键点建立一个描述符,用一组向量将这个关键点描述出来,使其不随各种变化而改变,比如光照变化、视角变化等等。这个描述子不但包括关键点,也包含关键点周围对其有贡献的像素点,并且描述符应该有较高的独特性,以便于提高特征点正确匹配的概率。
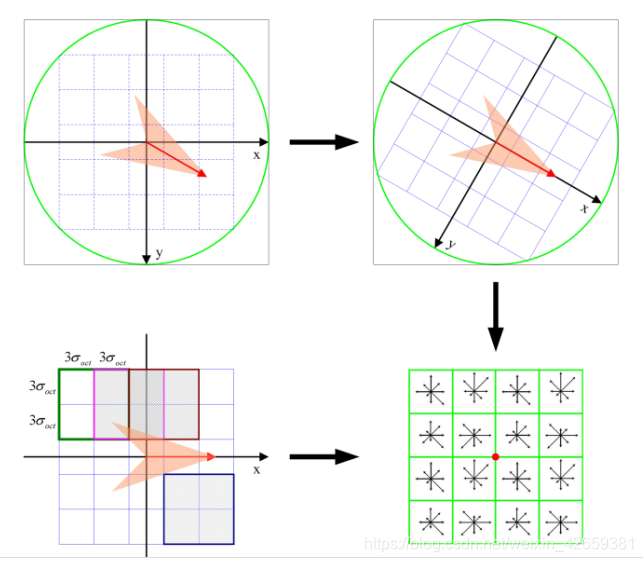
Lowe实验结果表明:描述子采用4×4×8=128维向量表征,综合效果最优(不变性与独特性)。
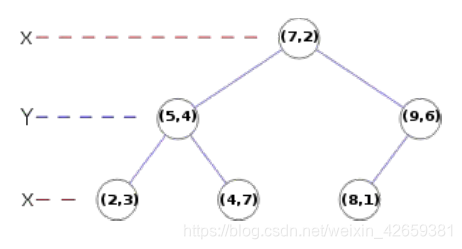
1.2.7 关键点匹配
关键点的匹配可以采用穷举法来完成,但是这样耗费的时间太多,一
般都采用kd树的数据结构来完成搜索。搜索的内容是以目标图像的关
键点为基准,搜索与目标图像的特征点最邻近的原图像特征点和次邻
近的原图像特征点。Kd树是一个平衡二叉树,如下所示:
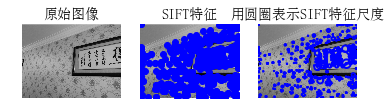
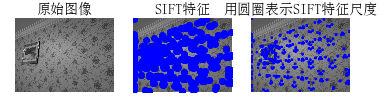
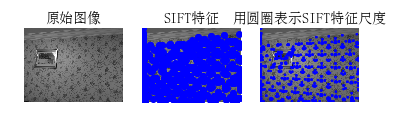
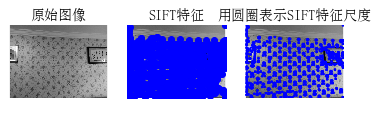
2、图像特征提取,并展示特征点
2.1 数据集
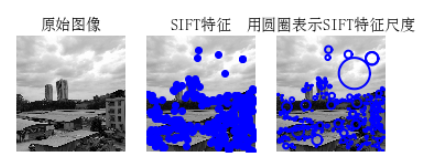
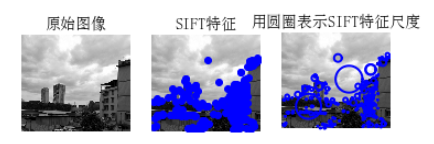
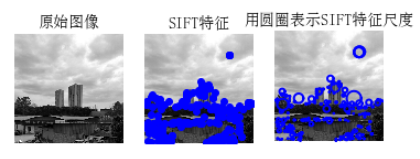
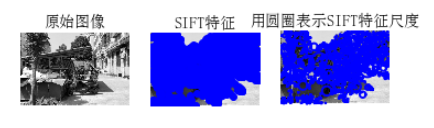
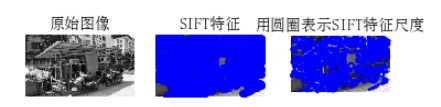
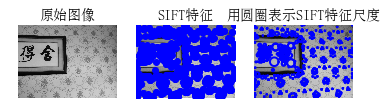
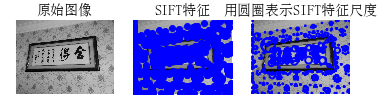
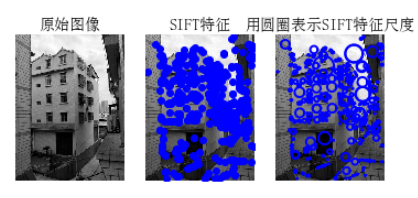
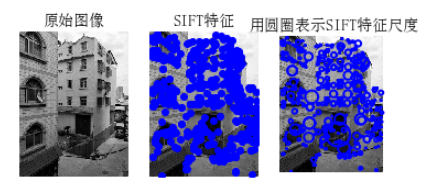
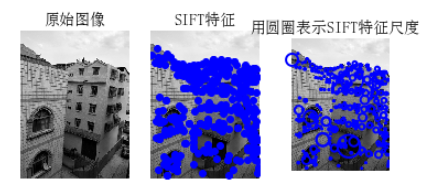
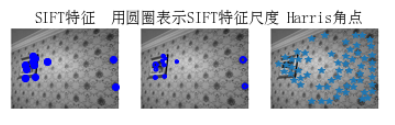
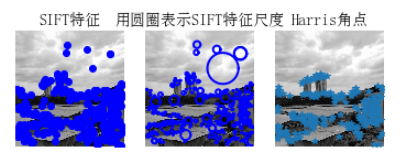
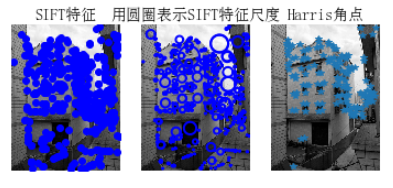
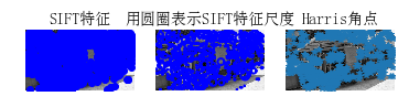
2.2 数据集特征提取结果展示

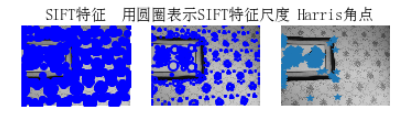
SIFT算法与Harris算法的比较
2.3 小结
- 以上实验拍摄了室内外不同场景,以及同一场景的不同角度不同尺度的图片。
- 从以上实验结果来,如对同一幅画不同角度不同尺度的拍摄,SIFT算法检测出来的特征点并无太大的区别,画中的特征点和墙上的细小特征点都没有基本一致,证明SIFT算法具有旋转不变性、尺度不变性、亮度不变性,以及SIFT算法的对于局部特征的提取是非常的稳定的。
- SIFT算法与Harris算法的比较:SIFT算法检测出来的特征点多于Harris角点检测出来的角点,体现出SIFT算法通过多次的采样,卷积等操作,输出的结果较为精准。且从运行的时间上相比,SIFT算法比Harris算法效率高。Harris角点只是对原图进行角点检测和变化,Harris特征点检测存在角点信息丢失与偏移的现象。
2.4 源代码
# -*- coding: utf-8 -*-
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
from PCV.localdescriptors import harris
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
imname = 'C:/TXX/1.png'
im = array(Image.open(imname).convert('L'))
sift.process_image(imname, 'empire.sift')
l1, d1 = sift.read_featur 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3056
3056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









