






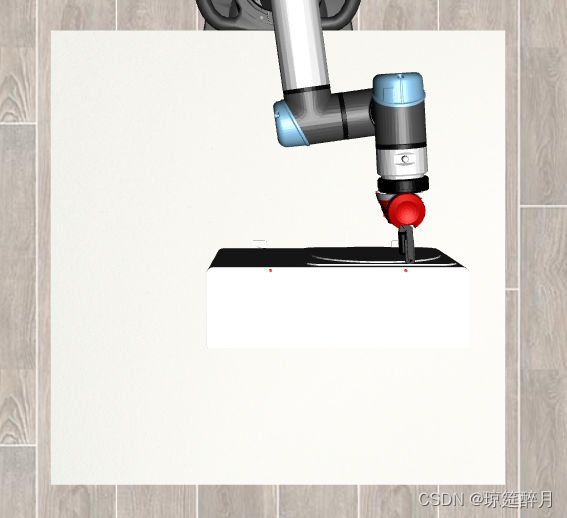
针对怼螺丝孔场景交叉测试
基于训练场景,进行修改,用以验证泛化性
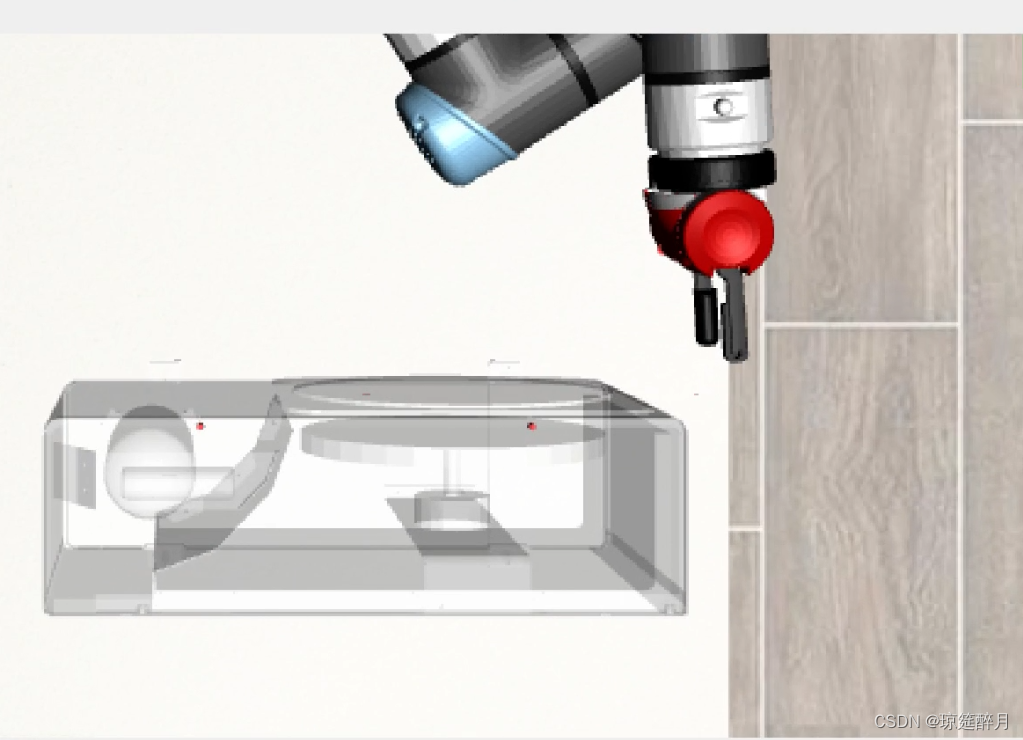
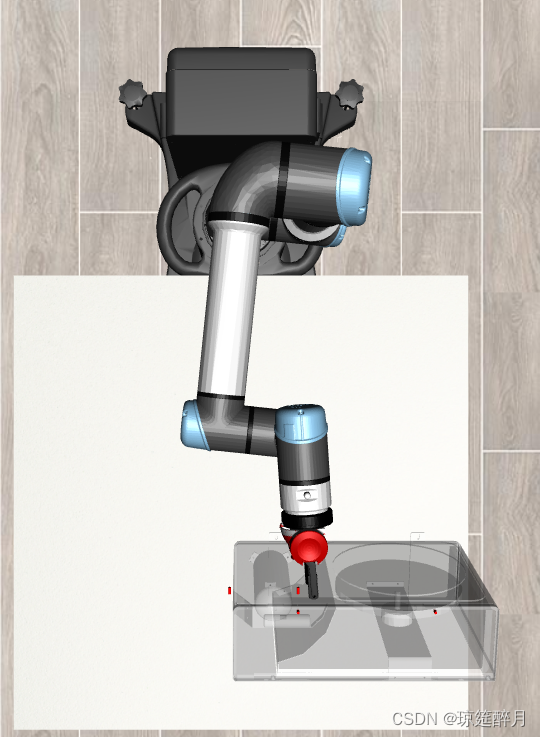
模型说明:训练所用的物体模型上,有两个孔位,其中左侧为1号孔位,右侧为2号孔位
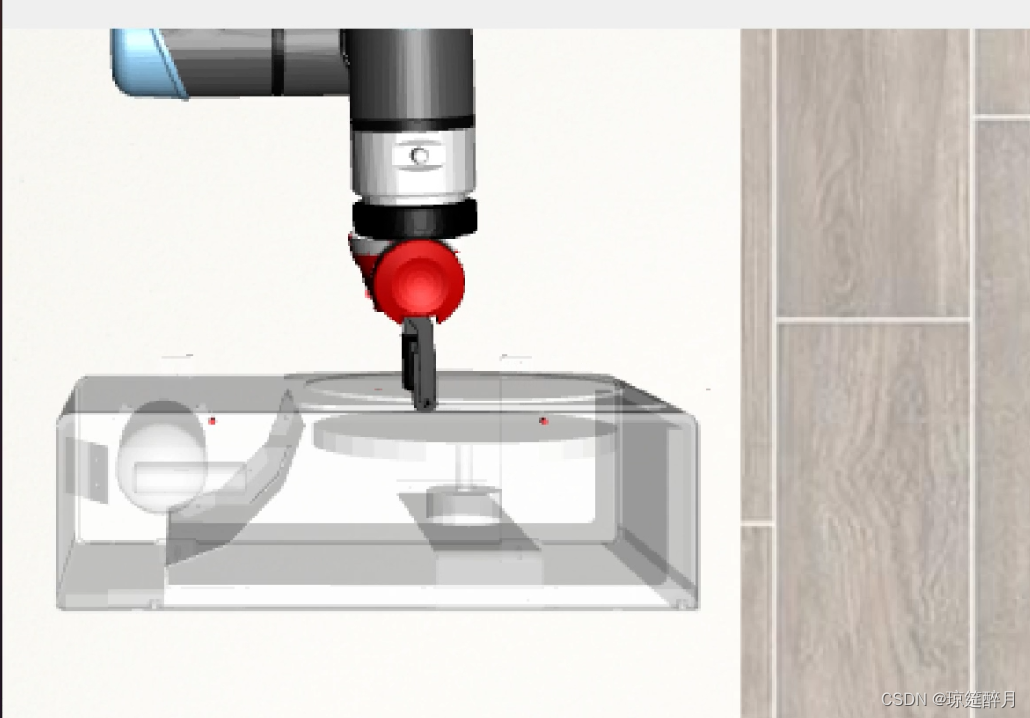
现状:可在设定的场景中,可任意平移外机,能准确的触碰到2号孔位
修改一:
修改内容: 修改 _check_success 中物体的姿态,改成 1号孔位相对与外机的坐标
结果:无效,机器人依旧前往 2号孔位
修改二:
修改内容: 修改 _setup_observables 函数中的观测对象,将该对象改成 1号孔位的坐标,
@sensor(modality=modality)
def cube_pos(obs_cache):
cube_pos = copy.deepcopy(self.sim.data.body_xpos[self.cube_body_id])
cube_pos[0] += -0.0564
cube_pos[1] += -0.1001
cube_pos[2] += 0.264
return cube_pos # np.array()
思路:修改观测函数的观察对象,希望后续通过变换孔位实现泛化
效果:有偏差,暂无法调分析效果
修改三
猜想:因为训练数据中有物体(外机)的位置和姿态信息,和一个固定孔洞的信息,这将导致策略无法实现孔洞转移后的正确执行(数据集中没有见过,无法执行),所以,下一步的计划:完善数据集,使数据集中随机出现1号或2号孔,然后在测试时,也是随机指定一个孔,以此实现单孔可任意放置的技能学习
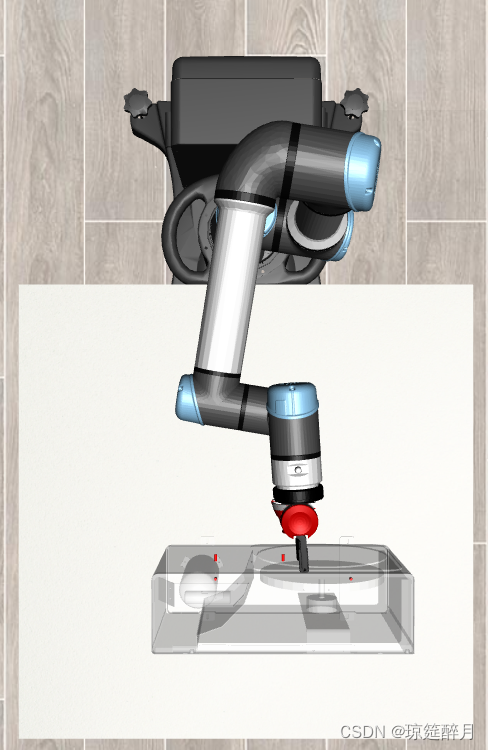
结果是失败的:
在对左侧孔的时候,总是怼到中间位置
疑问&分析:怼左侧孔正确率基本为0,怼右侧孔的正确率远远高于左侧孔,初步怀疑,是否是左侧孔的太靠外导致的
修改四
修改点: 将左侧孔往右侧平移
以右侧孔的位置作为训练时的数据,并进行测试;

修改五
双孔位处理
1:训练数据收集
更换孔位坐标后,策略模型测试效果如下:
修改点: 将模型坐标原点移动到一侧进行数据采集与训练
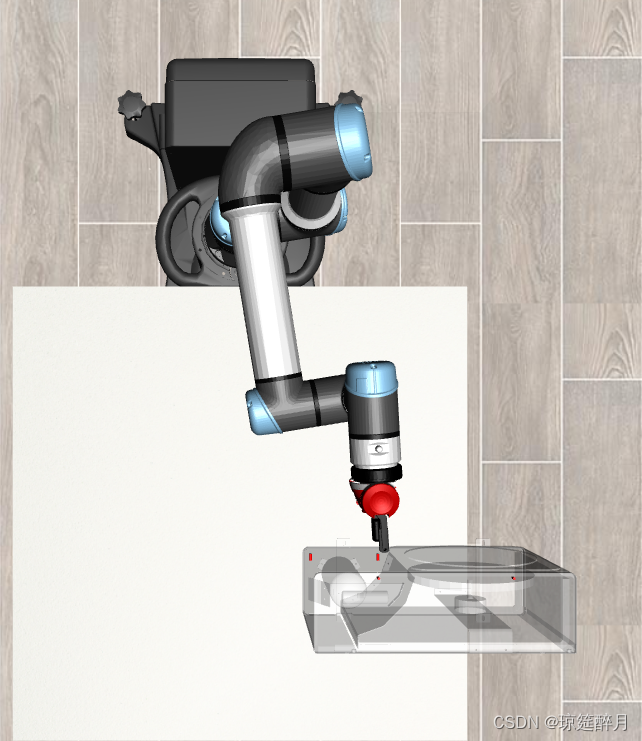
从测试结果得出结论:
- 任务是否成功与螺纹孔在外机的位置无直接关系;
- 螺纹孔与机器人的姿态关系较大
记录
1:f['data']['demo_1']['obs']['object'] 数据构成:
前7位为场景中 object 的位置+姿态,第8位到第10位暂时无法解析其含义,后面的均有自己定义,其中定义函数/代码为:

sensors 里面的元素就是[object]后面的数据的含义
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









