






四、内核功能接口
内核功能接口主要包括:
- NVIC接口;
- SysTick接口;
- Reset接口。
4.1 NVIC功能接口
4.1.1 配置优先级分组
/**
* @brief Set the Priority Grouping in NVIC Interrupt Controller
*
* @param PriorityGroup is priority grouping field
*
* Set the priority grouping field using the required unlock sequence.
* The parameter priority_grouping is assigned to the field
* SCB->AIRCR [10:8] PRIGROUP field. Only values from 0..7 are used.
* In case of a conflict between priority grouping and available
* priority bits (__NVIC_PRIO_BITS) the smallest possible priority group is set.
*/
static __INLINE void NVIC_SetPriorityGrouping(uint32_t PriorityGroup)
{
uint32_t reg_value;
uint32_t PriorityGroupTmp = (PriorityGroup & 0x07); /* only values 0..7 are used */
reg_value = SCB->AIRCR; /* read old register configuration */
reg_value &= ~(SCB_AIRCR_VECTKEY_Msk | SCB_AIRCR_PRIGROUP_Msk); /* clear bits to change */
reg_value = (reg_value |
(0x5FA << SCB_AIRCR_VECTKEY_Pos) |
(PriorityGroupTmp << 8)); /* Insert write key and priorty group */
SCB->AIRCR = reg_value;
}
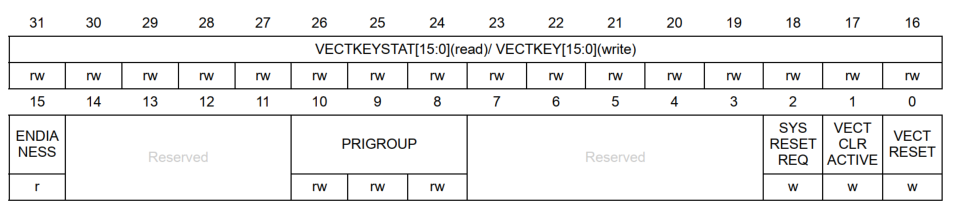
注意点:
- 配置优先级分组,需要配置SCB_AIRCR寄存器。
- SCB_AIRCR寄存器提供了处理模式需要的优先级分组、数据访问的端状态和系统的复位控制。
- SCB_AIRCR寄存器需要特权等级访问。
- 写SCB_AIRCR寄存器前需要写
0x5FA给VECTKEY,否则处理器写无效。 - 注意优先级有效位
__NVIC_PRIO_BITS。
接口功能解析:
- 保留输入有效值;
- 用定义的掩码清零
VECTKEY和PRIGROUP区域; - 打开写保护的同时配置优先级分组。
4.1.2 获取优先级分组
/**
* @brief Get the Priority Grouping from NVIC Interrupt Controller
*
* @return priority grouping field
*
* Get the priority grouping from NVIC Interrupt Controller.
* priority grouping is SCB->AIRCR [10:8] PRIGROUP field.
*/
static __INLINE uint32_t NVIC_GetPriorityGrouping(void)
{
return ((SCB->AIRCR & SCB_AIRCR_PRIGROUP_Msk) >> SCB_AIRCR_PRIGROUP_Pos); /* read priority grouping field */
}
接口功能解析:
- 移位返回。
4.1.3 关闭使能相应的中断(IRQ,非系统错误)
/**
* @brief Get the Priority Grouping from NVIC Interrupt Controller
*
* @return priority grouping field
*
* Get the priority grouping from NVIC Interrupt Controller.
* priority grouping is SCB->AIRCR [10:8] PRIGROUP field.
*/
static __INLINE uint32_t NVIC_GetPriorityGrouping(void)
{
return ((SCB->AIRCR & SCB_AIRCR_PRIGROUP_Msk) >> SCB_AIRCR_PRIGROUP_Pos); /* read priority grouping field */
}
注意:
- IRQn >= 16。
- NVIC_ICERx不包括0~15系统错误。
4.1.4 获取中断挂起(IRQ,非系统错误)
/**
* @brief Read the interrupt pending bit for a device specific interrupt source
*
* @param IRQn The number of the device specifc interrupt
* @return 1 = interrupt pending, 0 = interrupt not pending
*
* Read the pending register in NVIC and return 1 if its status is pending,
* otherwise it returns 0
*/
static __INLINE uint32_t NVIC_GetPendingIRQ(IRQn_Type IRQn)
{
return((uint32_t) ((NVIC->ISPR[(uint32_t)(IRQn) >> 5] & (1 << ((uint32_t)(IRQn) & 0x1F)))?1:0)); /* Return 1 if pending else 0 */
}
接口功能解析:
- 使用三目运算符判断挂起寄存器。
4.1.5 设置外部中断挂起(IRQ,非系统错误)
/**
* @brief Set the pending bit for an external interrupt
*
* @param IRQn The number of the interrupt for set pending
*
* Set the pending bit for the specified interrupt.
* The interrupt number cannot be a negative value.
*/
static __INLINE void NVIC_SetPendingIRQ(IRQn_Type IRQn)
{
NVIC->ISPR[((uint32_t)(IRQn) >> 5)] = (1 << ((uint32_t)(IRQn) & 0x1F)); /* set interrupt pending */
}
4.1.6 清除外部中断挂起(IRQ,非系统错误)
/**
* @brief Clear the pending bit for an external interrupt
*
* @param IRQn The number of the interrupt for clear pending
*
* Clear the pending bit for the specified interrupt.
* The interrupt number cannot be a negative value.
*/
static __INLINE void NVIC_ClearPendingIRQ(IRQn_Type IRQn)
{
NVIC->ICPR[((uint32_t)(IRQn) >> 5)] = (1 << ((uint32_t)(IRQn) & 0x1F)); /* Clear pending interrupt */
}
4.1.7 获取外部中断的活动位(IRQ,非系统错误)
/**
* @brief Read the active bit for an external interrupt
*
* @param IRQn The number of the interrupt for read active bit
* @return 1 = interrupt active, 0 = interrupt not active
*
* Read the active register in NVIC and returns 1 if its status is active,
* otherwise it returns 0.
*/
static __INLINE uint32_t NVIC_GetActive(IRQn_Type IRQn)
{
return((uint32_t)((NVIC->IABR[(uint32_t)(IRQn) >> 5] & (1 << ((uint32_t)(IRQn) & 0x1F)))?1:0)); /* Return 1 if active else 0 */
}
4.1.8 设置中断优先级(系统异常+外部中断)
/**
* @brief Set the priority for an interrupt
*
* @param IRQn The number of the interrupt for set priority
* @param priority The priority to set
*
* Set the priority for the specified interrupt. The interrupt
* number can be positive to specify an external (device specific)
* interrupt, or negative to specify an internal (core) interrupt.
*
* Note: The priority cannot be set for every core interrupt.
*/
static __INLINE void NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority)
{
if(IRQn < 0) {
SCB->SHP[((uint32_t)(IRQn) & 0xF)-4] = ((priority << (8 - __NVIC_PRIO_BITS)) & 0xff); } /* set Priority for Cortex-M3 System Interrupts */
else {
NVIC->IP[(uint32_t)(IRQn)] = ((priority << (8 - __NVIC_PRIO_BITS)) & 0xff); } /* set Priority for device specific Interrupts */
}
注意:
- 用正负判断系统异常和外部中断。
4.1.9 获取中断优先级(系统异常+外部中断)
/**
* @brief Read the priority for an interrupt
*
* @param IRQn The number of the interrupt for get priority
* @return The priority for the interrupt
*
* Read the priority for the specified interrupt. The interrupt
* number can be positive to specify an external (device specific)
* interrupt, or negative to specify an internal (core) interrupt.
*
* The returned priority value is automatically aligned to the implemented
* priority bits of the microcontroller.
*
* Note: The priority cannot be set for every core interrupt.
*/
static __INLINE uint32_t NVIC_GetPriority(IRQn_Type IRQn)
{
if(IRQn < 0) {
return((uint32_t)(SCB->SHP[((uint32_t)(IRQn) & 0xF)-4] >> (8 - __NVIC_PRIO_BITS))); } /* get priority for Cortex-M3 system interrupts */
else {
return((uint32_t)(NVIC->IP[(uint32_t)(IRQn)] >> (8 - __NVIC_PRIO_BITS))); } /* get priority for device specific interrupts */
}
4.1.10 对中断优先级编码
/**
* @brief Encode the priority for an interrupt
*
* @param PriorityGroup The used priority group
* @param PreemptPriority The preemptive priority value (starting from 0)
* @param SubPriority The sub priority value (starting from 0)
* @return The encoded priority for the interrupt
*
* Encode the priority for an interrupt with the given priority group,
* preemptive priority value and sub priority value.
* In case of a conflict between priority grouping and available
* priority bits (__NVIC_PRIO_BITS) the samllest possible priority group is set.
*
* The returned priority value can be used for NVIC_SetPriority(...) function
*/
static __INLINE uint32_t NVIC_EncodePriority (uint32_t PriorityGroup, uint32_t PreemptPriority, uint32_t SubPriority)
{
uint32_t PriorityGroupTmp = (PriorityGroup & 0x07); /* only values 0..7 are used */
uint32_t PreemptPriorityBits;
uint32_t SubPriorityBits;
PreemptPriorityBits = ((7 - PriorityGroupTmp) > __NVIC_PRIO_BITS) ? __NVIC_PRIO_BITS : 7 - PriorityGroupTmp;
SubPriorityBits = ((PriorityGroupTmp + __NVIC_PRIO_BITS) < 7) ? 0 : PriorityGroupTmp - 7 + __NVIC_PRIO_BITS;
return (
((PreemptPriority & ((1 << (PreemptPriorityBits)) - 1)) << SubPriorityBits) |
((SubPriority & ((1 << (SubPriorityBits )) - 1)))
);
}
4.1.11 对中断优先级解码
/**
* @brief Decode the priority of an interrupt
*
* @param Priority The priority for the interrupt
* @param PriorityGroup The used priority group
* @param pPreemptPriority The preemptive priority value (starting from 0)
* @param pSubPriority The sub priority value (starting from 0)
*
* Decode an interrupt priority value with the given priority group to
* preemptive priority value and sub priority value.
* In case of a conflict between priority grouping and available
* priority bits (__NVIC_PRIO_BITS) the samllest possible priority group is set.
*
* The priority value can be retrieved with NVIC_GetPriority(...) function
*/
static __INLINE void NVIC_DecodePriority (uint32_t Priority, uint32_t PriorityGroup, uint32_t* pPreemptPriority, uint32_t* pSubPriority)
{
uint32_t PriorityGroupTmp = (PriorityGroup & 0x07); /* only values 0..7 are used */
uint32_t PreemptPriorityBits;
uint32_t SubPriorityBits;
PreemptPriorityBits = ((7 - PriorityGroupTmp) > __NVIC_PRIO_BITS) ? __NVIC_PRIO_BITS : 7 - PriorityGroupTmp;
SubPriorityBits = ((PriorityGroupTmp + __NVIC_PRIO_BITS) < 7) ? 0 : PriorityGroupTmp - 7 + __NVIC_PRIO_BITS;
*pPreemptPriority = (Priority >> SubPriorityBits) & ((1 << (PreemptPriorityBits)) - 1);
*pSubPriority = (Priority ) & ((1 << (SubPriorityBits )) - 1);
}
4.1.12 使能相应的中断(IRQ,非系统错误)
/**
* @brief Enable Interrupt in NVIC Interrupt Controller
*
* @param IRQn The positive number of the external interrupt to enable
*
* Enable a device specific interupt in the NVIC interrupt controller.
* The interrupt number cannot be a negative value.
*/
static __INLINE void NVIC_EnableIRQ(IRQn_Type IRQn)
{
NVIC->ISER[((uint32_t)(IRQn) >> 5)] = (1 << ((uint32_t)(IRQn) & 0x1F)); /* enable interrupt */
}
4.2 SysTick功能接口
4.2.1 初始化并启动SysTick计数器和它的中断
/**
* @brief Initialize and start the SysTick counter and its interrupt.
*
* @param ticks number of ticks between two interrupts
* @return 1 = failed, 0 = successful
*
* Initialise the system tick timer and its interrupt and start the
* system tick timer / counter in free running mode to generate
* periodical interrupts.
*/
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
if (ticks > SysTick_LOAD_RELOAD_Msk) return (1); /* Reload value impossible */
SysTick->LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1; /* set reload register */
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1); /* set Priority for Cortex-M0 System Interrupts */
SysTick->VAL = 0; /* Load the SysTick Counter Value */
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk; /* Enable SysTick IRQ and SysTick Timer */
return (0); /* Function successful */
}
接口功能解析:
- 参数检查;
- 配置重载寄存器;
- 配置SysTick中断优先级;
- 计数器现值清零;
- 配置时钟源为处理器时钟AHB;
- 使能时钟中断;
- 启动时钟;
4.3 Reset功能接口
4.3.1 发起系统复位请求
/**
* @brief Initiate a system reset request.
*
* Initiate a system reset request to reset the MCU
*/
static __INLINE void NVIC_SystemReset(void)
{
SCB->AIRCR = ((0x5FA << SCB_AIRCR_VECTKEY_Pos) |
(SCB->AIRCR & SCB_AIRCR_PRIGROUP_Msk) |
SCB_AIRCR_SYSRESETREQ_Msk); /* Keep priority group unchanged */
__DSB(); /* Ensure completion of memory access */
while(1); /* wait until reset */
}
注意:
- 复位时需要保持优先级分组不变。
- 系统复位不会复位调试系统。
接口功能解析:
- 配置写访问;
- 保持优先级分组不变;
- 发起系统复位信号;
- 等待内存访问完成;
- 等待系统复位。
4.4 调试输入输出功能接口
内核调试接口包括:
- 内核调试输入/输出功能;
- 内核调试定义;
- 内核调试变量。
extern volatile int ITM_RxBuffer; /*!< variable to receive characters */
#define ITM_RXBUFFER_EMPTY 0x5AA55AA5 /*!< value identifying ITM_RxBuffer is ready for next character */
4.4.1 输出字符在ITM通道0
/**
* @brief Outputs a character via the ITM channel 0
*
* @param ch character to output
* @return character to output
*
* The function outputs a character via the ITM channel 0.
* The function returns when no debugger is connected that has booked the output.
* It is blocking when a debugger is connected, but the previous character send is not transmitted.
*/
static __INLINE uint32_t ITM_SendChar (uint32_t ch)
{
if ((CoreDebug->DEMCR & CoreDebug_DEMCR_TRCENA_Msk) && /* Trace enabled */
(ITM->TCR & ITM_TCR_ITMENA_Msk) && /* ITM enabled */
(ITM->TER & (1ul << 0) ) ) /* ITM Port #0 enabled */
{
while (ITM->PORT[0].u32 == 0);
ITM->PORT[0].u8 = (uint8_t) ch;
}
return (ch);
}
4.4.2 用ITM_RxBuffer接收字符
/**
* @brief Inputs a character via variable ITM_RxBuffer
*
* @return received character, -1 = no character received
*
* The function inputs a character via variable ITM_RxBuffer.
* The function returns when no debugger is connected that has booked the output.
* It is blocking when a debugger is connected, but the previous character send is not transmitted.
*/
static __INLINE int ITM_ReceiveChar (void) {
int ch = -1; /* no character available */
if (ITM_RxBuffer != ITM_RXBUFFER_EMPTY) {
ch = ITM_RxBuffer;
ITM_RxBuffer = ITM_RXBUFFER_EMPTY; /* ready for next character */
}
return (ch);
}
4.4.3 通过变量 ITM_RxBuffer 检查字符是否可用
/**
* @brief Check if a character via variable ITM_RxBuffer is available
*
* @return 1 = character available, 0 = no character available
*
* The function checks variable ITM_RxBuffer whether a character is available or not.
* The function returns '1' if a character is available and '0' if no character is available.
*/
static __INLINE int ITM_CheckChar (void) {
if (ITM_RxBuffer == ITM_RXBUFFER_EMPTY) {
return (0); /* no character available */
} else {
return (1); /* character available */
}
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











