







目录
创建DEM完整流程
命令1:lronac2isis
命令2:spiceinit
命令3:lronaccal命令4:spicefit- 描述:为相机指向(camera pointing)拟合一个函数。运行该命令之前,要求使用spiceinit初始化cube文件。该程序查看cube文件的设备指向表(InstrumentPointing table),并利用最小二乘解算赤经、赤纬和扭曲(twist)到抛物线的拟合。该程序将减少“噪声”指向数据。要恢复原始指向,只需重新运行spiceinit。该程序只针对线阵相机(line scan cameras),不针对框幅式相机。
命令5:lronacecho
命令6:
bundle_adjust --ip-detect-method 0 /home/xxx/yyyy/bundle/M140890072RE.cal.echo.cub /home/xxx/yyyy/bundle/M140903652LE.cal.echo.cub -o /home/xxx/yyyy/output/ba
命令行选项(options)
| 选项 | 描述 | 值 |
| --ip-detect-method | 选取特征点检测方法 | 默认:0 0=OBAloG;1=SIFT;2=ORB |
| --ip-uniqueness-threshold | 阈值越高,兴趣点越多,但独特性更低 | 默认:0.7 |
| --epipolar-threshold | 从核线到搜索特征点的最大距离。 | 默认:-1 |
| --filter | 网格划分时应用于已知圆形邻域内点云高度的过滤器(半径利用--search-radius-factor控制) | 默认:weighted_average; min;max;mean;median;stddev;count(点数);nmad |
以上选项有时也出现在命令运行时的终端界面上。
- 输出结果文件:
*.vwip:影像特征文件。如果有配准方法(alignment-method),则SP将自动搜索用作连接点的影像特征。原始影像特征存储在*.vwip文件中,每个输入图像对应一个文件。该文件也可以使用ipfind手动生成(并可以对检测算法进行更细微的调整)。

*.match:影像间的连接点文件。文件列出一组从前面的*.vwip文件中选择出的唯一点,这些点已经在一对影像中完成识别和匹配。如果这一对影像为left.cub和right.cub,匹配将会得到left_right.match文件。
*.vwip和*.match文件旨在作为缓存的连接点信息,有助于加快SP的预处理阶段,体现在:如果有了这两个文件,则parallel_stereo就会跳过特征点配准(对齐)阶段,并使用*.match文件中缓存的连接点。如果文件损坏,parallel_stereo也会自动重新生成(需删除损坏的文件)。均可以利用stereo_gui进行观察。
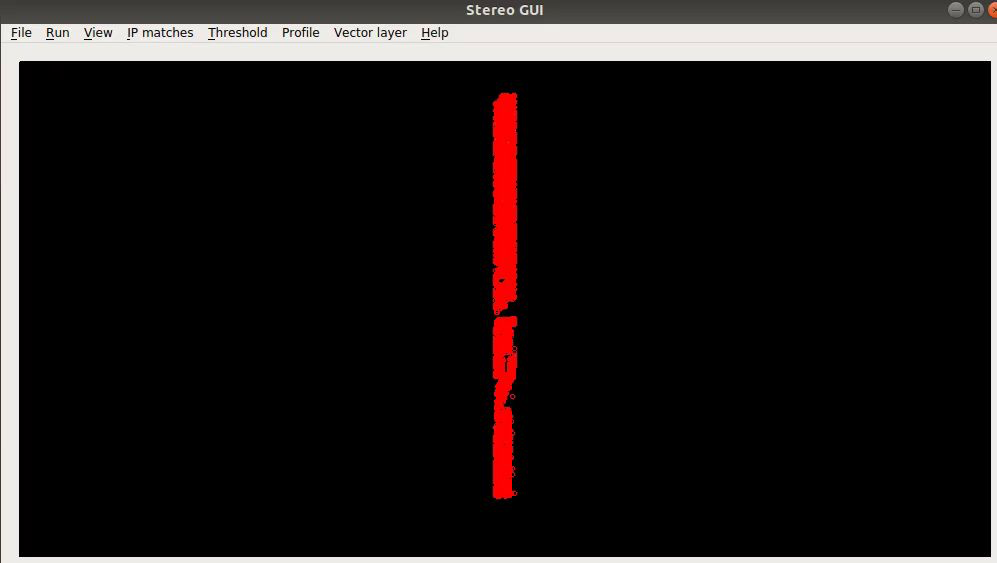
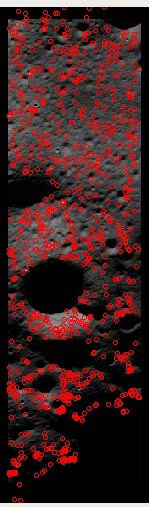
*.vwip文件(左:原图;右:放大)
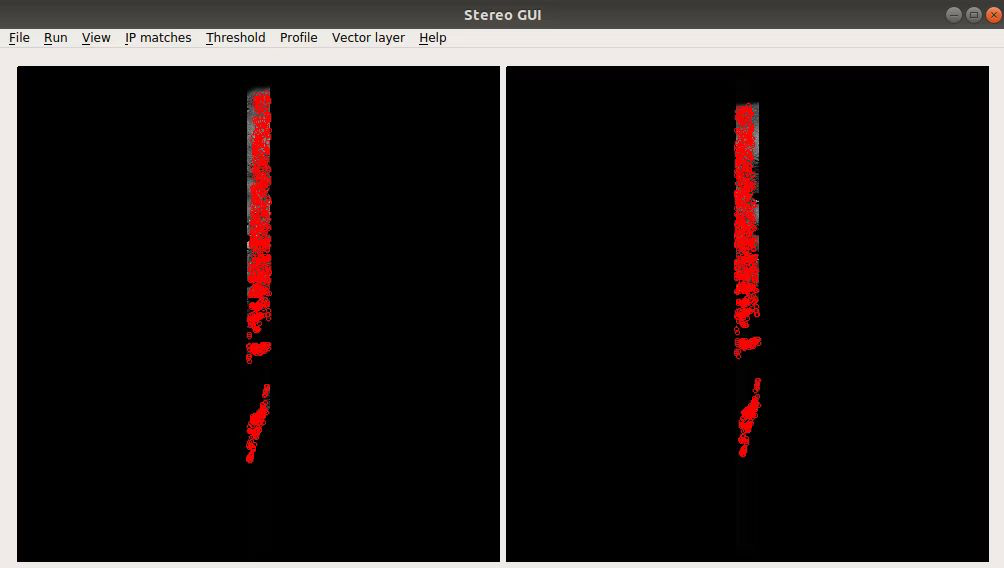
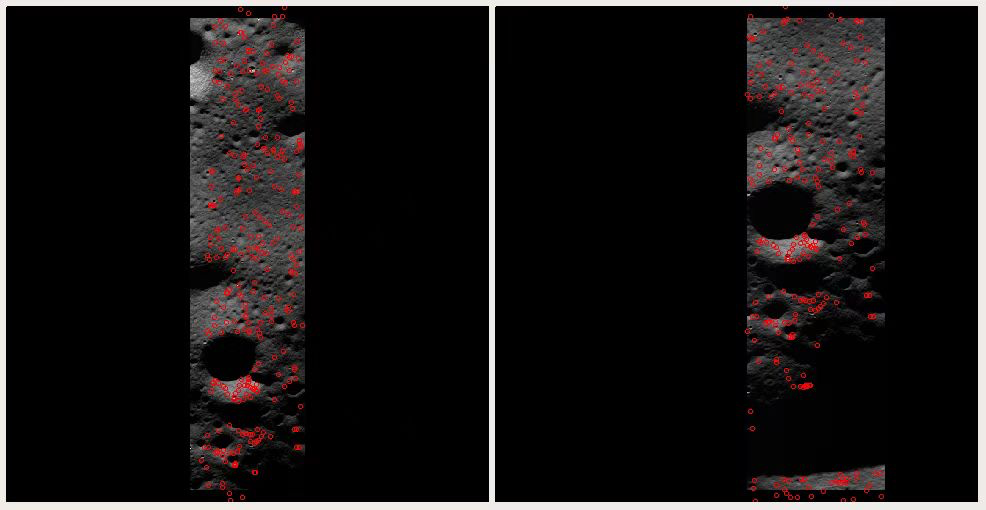
*.match文件(上:原图;下:放大)
- 输出误差文件:
如果指定了--datum选项,bundle_adjust将写入两幅或多幅影像间匹配的每个特征的三角化后的世界坐标,以及优化之前和之后每个位置的平均绝对残差(重投影误差)。
可以通过检查这些文件,查看哪些像素上的残差较大。
与GCP对应的残差将打印在这些文件的末尾,并用字符串#GCP标记。
字段num_observations计算了每个点被投影到多少张影像上。
*.residuals_stats.txt:每个相机的像素残差规范化后的初始和最终平均值(mean)和中值(median)。


*.raw_pixels.txt:每个相机中的每个像素的行、列残差(重投影残差)。

除非bundle_adjust调用了--inline-adjustments选项,否则如果在原地修改相机,将输出*.adjust文件保存相机调整信息。存储了平移T(包括x,y,z,以米为度量)和旋转(w,x,y,z)。旋转指的是像素(0,0)围绕相机中心C的旋转。因此,如果P是ECEF中的一个点(相机世界),并且对相机做了一个调整,为了使P与调整后的相机一致,必须进行一个转换:
Bundle Adjustment
卫星的位置和方向误差直接影响到立体匹配产生的DEM的精度。光束法平差是同时调整许多相机的属性和他们看到的物体的三维位置的过程,以最小化估计的反投影像素位置与捕获的影像中的实际测量位置的误差。
光束法平差(bundle adjustment)确保单个地面特征在多个图像的观测是自身一致的。如果是不一致的,那么相机的位置和方向以及特征的三维位置都必须进行调整直至一致为止。这种优化是与数千个(或更多)类似的约束同时进行的,涉及到在其他影像中观察到的不同的特征。光束法平差可以在两幅有重叠的影像上进行操作,数千幅也可以。操作时需要谨慎,并要确保并验证其具有现实意义。
光束法平差还可以利用GCPs(地面控制点),地面控制点是已知特征的三维位置(通常是通过在另一个现有的DEM中进行手工量测)。GCPs可以提高DEM内部的一致性,或者将DEM与现有的数据产品进行配准(对齐)。只记录相机的最终属性供ASP使用。这些属性可以被加载到parallel_stereo中,该程序可以使用自身的方法三角化三维特征位置。
使用SP时,光束法平差是获取影像以及创建DEMs之间的一个可选步骤。在运行parallel_stereo前需要进行光束法平差。尽管光束法平差不是生成DEMs必须的步骤,但对于那些计划创建DEMs以进行科学分析和发表的用户是强烈推荐的。将BA合并到SP工作流中不仅会产生内部更一致的DEMs,也是将DEMs与其他数据集和大地控制网进行配准时的正确的方法。
PC_align:经过光束法平差和立体匹配后生成的DEM可能需要对齐到一个已知的参考坐标系。
--heights-from-dem 和 --reference-terrain:如何在光束法平差中合并外部DEM。这些只能局部优化相机参数,利用PC_align进行初始配准仍然是必要的。
基本影像预处理命令
S1:影像下载 Lunar Orbital Data Explorer - Product Search
S2:预处理(格式转换、星历获取、辐射校正、回声校正)
lronac2isis from = M1103787673LE.IMG to = M1103787673LE.cub&&spiceinit from = M1103787673LE.cub&&lronaccal from = M1103787673LE.cub to = M1103787673LE_cal.cub&&lronacecho from=M1103787673LE_cal.cub to=M1103787673LE_cal.echo.cubS3:cam2map
CTX数据处理
S1:影像下载 Mars Orbital Data Explorer - Product Search
S2:预处理(格式转换)
mroctx2isisISIS环境下遇到的问题合集
星历数据太大无法下载到虚拟机怎么办
接硬盘,把星历的下载路径改为硬盘路径(在终端运行以下命令),每次从硬盘中调用,path to data directory改为硬盘的data路径
python $CONDA_PREFIX/scripts/isisVarInit.py --data-dir=[path to data directory]**I/O ERROR**Unable to open [****/data/base/translations/pdsImage.trn]
在虚拟机主目录搜索translations文件夹,把整个目录复制到缺失的目录下,不知道为什么突然出现这种状况,translations文件夹在SP的安装目录下,通过搜索即可。
参考文献:ASP_book

















 1546
1546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









