







介绍
Space-Time Neighbor-Aware Network (STNNet-pytorch)时空邻域感知网络
这是用于检测、跟踪和计数的 PyTorch 版本存储库满足人群中的无人机:基准测试。
先决条件
我们使用 Anaconda 作为环境。该代码已在 Ubuntu 18.04 上使用 Python 3.6、CUDA 10.2 和 PyTorch v1.6.0 进行了测试。训练和测试都需要 NVIDIA GPU。
安装 PyTorch==1.6 和 torchvision==0.7:
conda create -n STTNet python=3.6 pytorch=1.6 torchvision -c pytorch
安装包依赖:
pip install -r requirments.txt
出现的问题
1.安装spatial-correlation-sampler时出现错误 error:You‘re running a too old version of GCC. We need GCC 5 or later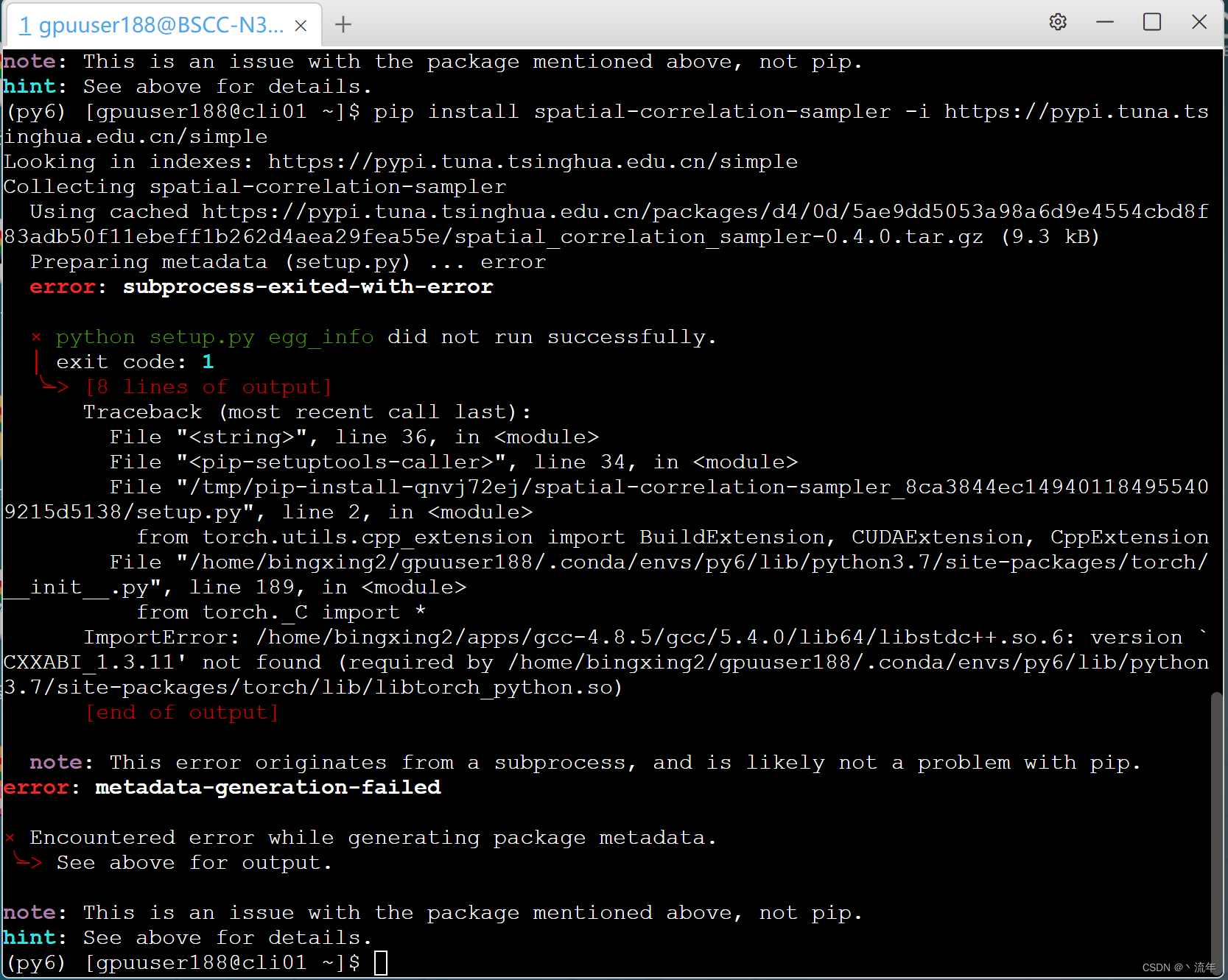
解决:gcc版本过低,利用 module avail gcc 查看已安装的gcc版本, module load gcc/版本号 加载版本。实验时发现gcc7.3依然版本低,最终用了gcc9.3.
2. 安装sklearn时出现错误 ModuleNotFoundError: No module named 'sklearn'
解决:注意一般情况下缺少“XXX”,就需要conda install XXX,但是使用conda install sklearn时,报错;原因是需要安装:scikit-learn包!!!对于sklearn模块的安装方法是改为conda install scikit-learn
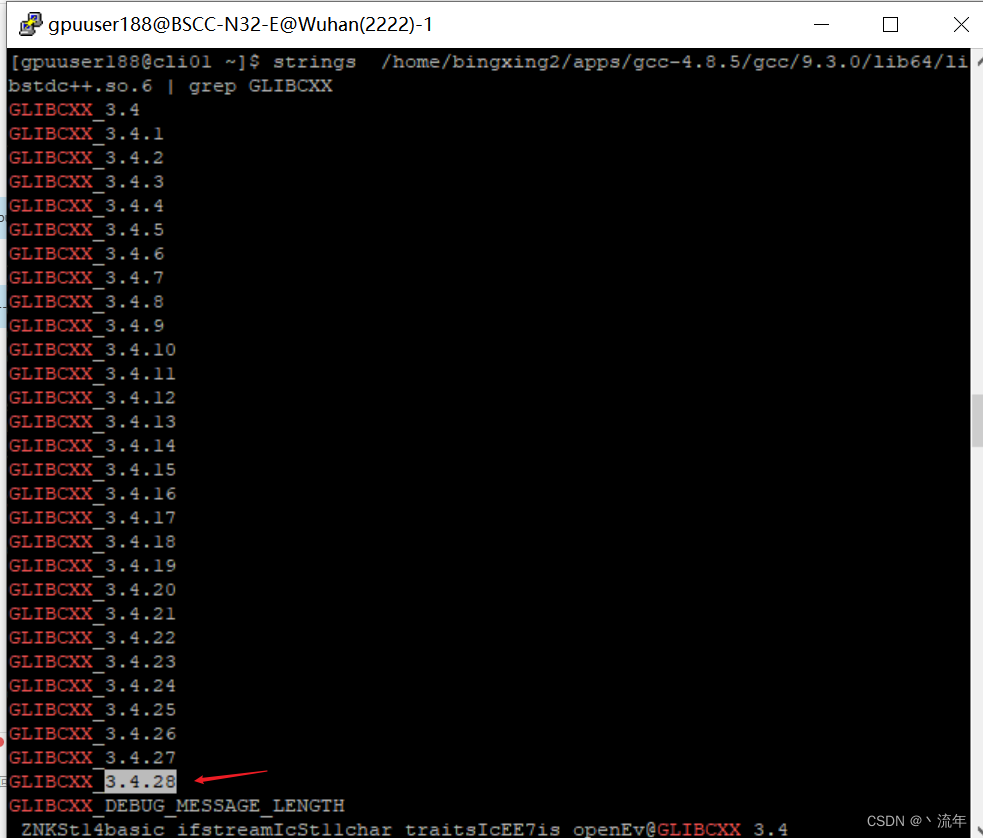
3. ImportError: /home/bingxing2/apps/anaconda/2021.11/lib/libstdc++.so.6: version `GLIBCXX_3.4.29' not found (required by /home/bingxing2/gpuuser188/.conda/envs/py6/lib/python3.7/ste-packages/scipy/spatial/ckdtree.cpython-37m-x86 64-linux-gnu.so)
 解决:GLIBCXX要求3.4.29版本太高了,超算最高版本的9.3.0是支持3.4.28 最后是超算工程师解决。
解决:GLIBCXX要求3.4.29版本太高了,超算最高版本的9.3.0是支持3.4.28 最后是超算工程师解决。
4. Python: NameError:name 'dataset' is not defined
python2.0和python3.0版本不同,代码有些许差异
未解决
代码流程
1. 真值生成
请按照make_data_density.py和make_data_localization.py分别生成密度图和位置图的ground-truth。
2. 训练过程
如果只使用密度头,运行:
python mytrain.py den --mGPUs --bs 4
如果同时使用密度头和定位头,请运行:
python mytrain.py loc --mGPUs --loc --bs 4
如果删除关系约束,请运行:
python mytrain.py tem --mGPUs --loc --trk --tem --bs 4 --pre loc_best_model.pth.tar
如果删除循环损失,请运行:
python mytrain.py trk --mGPUs --loc --trk --bs 4 --pre loc_best_model.pth.tar
对于 STNNet,运行:
python mytrain.py cyc --mGPUs --trk --cyc --bs 4 --pre loc_best_model.pth.tar
3. 测试过程
如果使用密度头评估 STNNet 变体,请运行:
python mytest.py
如果同时使用密度头和定位头评估 STNNet 变体,请运行:
python mytest.py --loc
如果在没有关系约束的情况下评估 STNNet 变体,请运行:
python mytest.py --loc --trk --tem
如果在没有循环损失的情况下评估 STNNet 变体,请运行:
python mytest.py --loc --trk
如果评估 STNNet,请运行:
python mytest.py --loc --trk --cyc
要评估检测和跟踪性能,请分别使用DroneCrowd-VID-toolkit和DroneCrowd-MOT-toolkit。
参考
如果您使用 STNNet 方法或 DroneCrowd 数据集,请引用我们的论文。谢谢!
<span style="color:#c9d1d9"><span style="background-color:#0d1117"><span style="background-color:var(--color-canvas-subtle)"><code>@inproceedings{dronecrowd_cvpr2021,
author = {Longyin Wen and
Dawei Du and
Pengfei Zhu and
Qinghua Hu and
Qilong Wang and
Liefeng Bo and
Siwei Lyu},
title = {Detection, Tracking, and Counting Meets Drones in Crowds: A Benchmark},
booktitle = {CVPR},
year = {2021}
}</code></span></span></span>














 2928
2928











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









