






相位解缠技术最早出现在20世纪60年代70年代初,当时主要是信号处理的需要,所研究的主要是一维问题,一般采用积分法进行相位解缠。从20世纪70年代末起,特别是90年代后,由于ISAR等二维图像处理的需要,二维相位解缠技术得到迅速发展。
目前,国内外学者已经提出了很多相位解缠算法。1988年Goldsteinu等人提出了枝切法,这种方法确定相位不连续点,设置枝切线,通过孤立相位不连续点来阻止误差的传播,但是当相位不连续点比较密集时无法正确设置枝切线;1990年Prati利用相位质量图指导枝切线的设置[1.,Derauw于1995年利用相干图指导设置枝切线,但是没有提出详细的算法1,1996年Flynn给出了详细的算法,称之为“mask-cut”算法。1997年Fynn等提出了基于最小不连续测度的相位解缠算法,即“Flynn”算法呵。1999年,XuWei等提出了区域增长法2000年Carballo提出了网络流法。另外Fried“等于1977年提出了无权最小二乘相位解缠算法。还有其它的一些算法,如条纹检测法、基于遗传算法的解缠算法、基于模拟退火理论的解缠算法等等相位解缠是制约ISAR精度的一个瓶颈,主要因为以下三个方面:①SAR 侧视成像方式以及地形起伏引起的图像几何畸变(雷达阴影、透视收缩叠掩);②干涉相位信号的信噪比太低;③地表不连续导致干涉相位存在显著跳跃
目前的相位解缠算法的可靠性很大程度上依赖于干涉图的质量,没有一种通用的算法。
InSAR相位解缠问题的出现至今还不足三十年的时间,然而提出的相应算法已经相当多。现有的相位解缠算法分为三大类,即路径跟踪法(枝切法,质量图,flynn's),最小范数法(PCG)和网络流法(SNAPHU)。路径跟踪法和最小二乘法的出发点是相同的,就是假设解缠相位梯度小于元,但是这种假设在有些相位点上是不成立的,这就导致解缠相位的梯度估值可能是不确定的。这两种算法的根本区别就在于解决这种不确定性问题的途径不同。路径跟踪法是对相位梯度估值沿预先确定的自相容的路径进行积分实现相位解缠的过程,其核心思想是在积分时绕过枝切线,避免误差传播。显然,这类算法都是一种局域算子,在干涉图质量相差较大的区域之间会出现不连续的情况。最小二乘法是通过寻求解缠前后的相位梯度差最小来实现相位解缠的,与前者不同的是,最小二乘法是一种全局算子,稳定性高,但是导致了误差的传播。以上两大类算法都致力于克服相位场的不一致性,在速度和精确性却不能同时兼顾。网络流法则兼顾了速度和精确性两方面,其基本思想是将解缠相位梯度和缠绕相位梯度之间的差异最小化。网络流法一般采用相干系数来确定权重,但是相关系数有时存在一定的估计偏差,导致解缠误差,所以如何确定无偏的权重提高解缠的精度是急待解决的问题:

结论与展望
通过对西安数据的实验,我们得到以下结论,
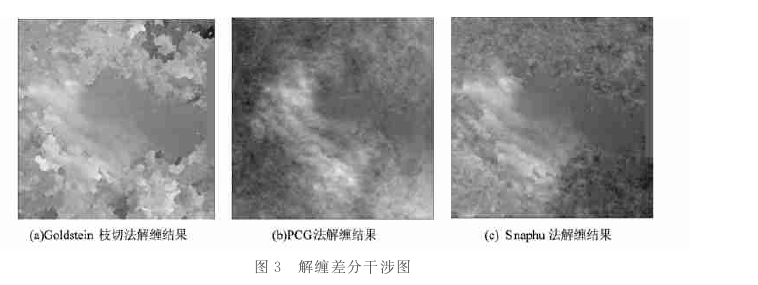
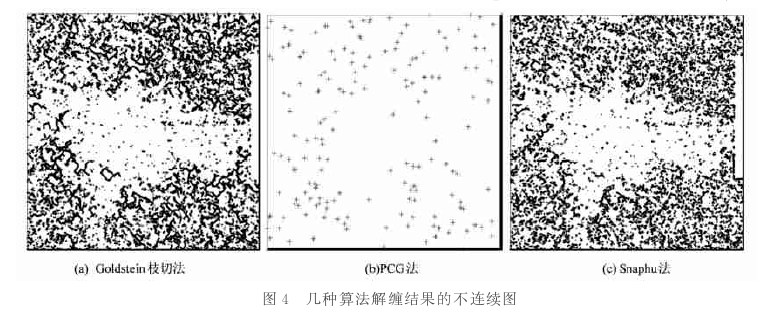
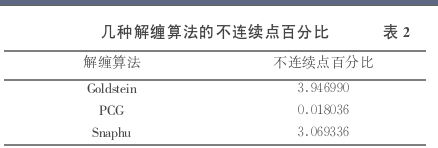
Goldstein 枝切法运行速度快,占用内存少,对噪声少的区域能获得正确的解缠结果。但是解缠结果的连续性较差,尤其表现在干涉图质量差异较大的区域。所以Goldstein枝切法较适合解缠质量整体较好的干涉图。
Snaphu算法解缠结果的连续性较好,算法对噪声的控制能力比较稳定,对于少量噪声的区域能很好的完成解缠,但是这种算法比较耗时,随着计算机技术的飞速发展,这种算法的运算效率是可以接受的。所以,对于含噪声不多的干涉图,用这种算法解缠比较合适。
预解共轭梯度法是较典型的最小二乘法,其解缠结果比较平滑,对噪声区域也能解缠,但同时将误差也传递到了高质量区域造成了系统性的偏差。我们也可以得到这三种算法的适用范围,一般来说,对于给定的干涉图,如果质量较好(噪声少),则我们直接用Goldstein枝切法解缠。统计费用网络流法适合于有部分噪声的干。

















 2930
2930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











