






1.Supervisor模式与SVC模式
- Supervisor模式是ARM处理器的一个特权工作模式,允许执行特权指令和访问特权资源。
- SVC模式(Supervisor Call)是与Supervisor模式相关的一个功能或指令,用于从用户模式切换到Supervisor模式,并触发系统服务例程的执行。
- SVC不是一种独立的工作模式,而是与Supervisor模式协同工作,用于系统调用和异常处理。
所以,Supervisor模式和SVC模式在ARM处理器中是不同的概念,但它们之间有密切的关联。SVC模式使用Supervisor模式的功能来提供系统服务。
2.指令+s的作用,影响N,Z,C,V位
ARM指令中的“S”后缀用于指示该指令执行后是否更新程序状态寄存器(CPSR)的条件标志位。这些标志位可以用于后续的条件判断或分支操作,从而影响指令的执行顺序。
以下是具体功能和详细解释:
-
条件标志位更新:当ARM指令后带有“S”后缀时,该指令执行后,程序状态寄存器的条件标志位(如N、Z、C、V等,分别代表负数、零、进位和溢出)将被刷新或更新。这些标志位经常用于对条件进行测试,例如是否溢出、是否进位等。
-
影响指令执行顺序:根据这些条件标志位的变化,程序可以执行不同的分支或循环,从而影响指令的执行顺序。例如,可以使用这些标志位来判断一个加法操作是否导致溢出,然后根据结果选择不同的后续指令。
-
指令格式:在ARM指令中,后缀“S”是可选的。当不使用“S”后缀时,指令执行后程序状态寄存器的条件标志位将不会发生变化。指令的一般格式可以表示为
<opcode>{ <cond> } {S}<Rd>,<Rn>{, <operand2> },其中<opcode>是操作码,<cond>是可选的条件码,<Rd>是目标寄存器,<Rn>是存放第一操作数的寄存器,<operand2>是第二操作数。 -
具体示例:以加法指令为例,
ADD R3, R5, R8(没有使用“S”后缀)执行后,条件标志位将不会发生变化;而ADDS R3, R5, R8(使用了“S”后缀)执行后,条件标志位将根据结果刷新。
3.CPSR(程序状态寄存器)/SPSR(程序状态保存寄存器)
在ARM架构中,CPSR(Current Program Status Register,当前程序状态寄存器)和SPSR(Saved Program Status Register,程序状态保存寄存器)是两个重要的状态寄存器,它们在处理器中扮演着关键的角色。以下是关于这两个寄存器的详细解释:
3.1. CPSR(当前程序状态寄存器)
N和C标志位被“置位”,指的是这些标志位被设置为特定的值以表示某种状态或条件。
功能与作用:
- CPSR在用户级编程时用于存储条件码。
- 它包含条件码标志、中断禁止位、当前处理器模式以及其他状态和控制信息。
内容详解:
- 条件标志位:包括N、Z、C、V等,用于表示指令执行后的状态,如运算结果的符号、零、进位和溢出等。
- 中断禁止位:包括I(IRQ中断禁止位)和F(FIQ中断禁止位),用于控制是否允许相应的中断发生。
- 处理器模式标志位:指示处理器当前处于哪种模式,如用户模式、系统模式、中断模式等。
访问方式:
- CPSR在任何处理器工作模式下都可以被访问。
3.2. SPSR(程序状态保存寄存器)
功能与作用:
- SPSR用于保存CPSR的状态,以便在异常返回后恢复异常发生时的工作状态。
内容详解:
- 当特定的异常中断发生时,SPSR会存放当前CPSR的内容。
- 在异常中断退出时,可以使用SPSR来恢复CPSR的状态。
注意:
- 由于用户模式和系统模式不是异常中断模式,所以它们没有对应的SPSR。
- 如果在用户模式或系统模式下尝试访问SPSR,将会产生不可预知的后果。
总结:
- CPSR是ARM处理器中的核心寄存器之一,用于存储处理器的状态信息,并在各种模式下提供对中断和其他功能的控制。
- SPSR作为CPSR的备份,用于在异常处理过程中保存和恢复处理器的状态。这两个寄存器共同确保了ARM处理器在各种复杂操作中的稳定性和可靠性。
4.跳转指令和加载指令
4.1跳转指令(b/bl/bx)
b:无条件跳转指令;
bl:用于函数调用,并在lr寄存器中保存返回地址。
bl和b之间的区别就在于bl会在lr寄存器中保存回来的地址。
bx:回到调用处,即:返回主调函数。
bxgt:满足gt条件时,回到调用处。(gt:>, ge:>=)
bx 基于寄存器的内容进行跳转,并支持 ARM/Thumb 切换。
4.2 加载指令(LDR)
- LDR指令:
- 功能:用于从内存中读取一个32位的字数据到目的寄存器中。
- 格式:
LDR{条件} 目的寄存器, <存储器地址> - 示例:
LDR R0, [R1]:将存储器地址为R1的字数据读入寄存器R0。LDR R0, [R1, #8]:将存储器地址为R1+8的字数据读入寄存器R0。
- 特点:
- 寻址方式灵活多样,支持直接地址、基址加偏移量等。
- 当程序计数器PC作为目的寄存器时,指令从存储器中读取的字数据被当作目的地址,从而可以实现程序流程的跳转。
- bic指定位清零指令:
- BIC{S}<c> <Rd>, <Rn>, #<const>;将rn中的字数据const为1的比特清零,把结果放入rd
- orr指定位置位指令:
- ORR{S}<c> <Rd>, <Rn>, #<const>
5.ARM中常见的数据处理指令
-
ADD:
- 含义:加法指令。
- 使用:将两个寄存器或立即数与一个寄存器相加,并将结果存储在一个寄存器中。
- 示例:
ADD R1, R2, R3将R2和R3的值相加,并将结果存储在R1中。
-
SUB:
- 含义:减法指令。
- 使用:从一个寄存器中减去另一个寄存器或立即数,并将结果存储在一个寄存器中。
- 示例:
SUB R1, R2, R3从R2中减去R3的值,并将结果存储在R1中。
ARM指令集中的数据处理指令是用于在寄存器中执行数学运算、逻辑运算以及数据传送的指令。这些指令在ARM架构中扮演着核心角色,允许CPU高效地执行各种计算任务。以下是一些ARM中常见的数据处理指令,按照其功能分类进行归纳:
- 数据传送指令:
- MOV指令:用于将一个寄存器或立即数的值传送到另一个寄存器。例如,MOV R1, R0 将寄存器R0的值传送到寄存器R1。
- MVN指令:是数据取反传送指令,将一个寄存器或立即数的反码传送到目标寄存器。例如,MVN R0, #0 将立即数0取反后传送到寄存器R0。
- 算术运算指令:
- ADD指令:用于将两个寄存器或立即数相加,并将结果存放到目的寄存器中。例如,ADD R0, R1, R2 将R1和R2的值相加后存放到R0。
- ADC指令:带进位的加法指令,用于将两个寄存器或立即数相加,并加上CPSR中的C条件标志位的值,然后将结果存放到目的寄存器中。
- 逻辑运算指令(虽然参考文章中没有直接提及逻辑运算指令,但它们是数据处理指令的重要部分):
- AND指令:用于将两个寄存器或立即数进行逻辑与运算。
- ORR指令:用于将两个寄存器或立即数进行逻辑或运算。
- EOR指令:用于将两个寄存器或立即数进行逻辑异或运算。
- 比较指令:
- CMP指令:用于比较两个寄存器或立即数的值,并更新CPSR中的条件标志位,但不保存运算结果。
- CMN指令:将一个寄存器或立即数的取反值与另一个寄存器或立即数进行比较,并更新CPSR中的条件标志位。
- 移位指令(虽然参考文章中没有直接提及移位指令,但它们也是数据处理指令的一部分):
- LSL指令:逻辑左移指令,将寄存器的内容向左移动指定的位数。
- LSR指令:逻辑右移指令,将寄存器的内容向右移动指定的位数。
- ASR指令:算术右移指令,在移位时保留符号位。
- 特殊数据处理指令:
- MOVS指令:与MOV指令类似,但会更新CPSR中的条件标志位。
- BIC指令:位清零指令,用于将某个寄存器中的特定位清零。
这些指令共同构成了ARM指令集中的数据处理部分,允许开发者在ARM架构的CPU上执行各种复杂的计算任务。需要注意的是,ARM指令集在不同的版本(如ARMv7、ARMv8等)中可能会有所不同,上述指令是ARM指令集中常见的和通用的部分。
6.栈的实现类型:
2440实现保护和恢复现场使用的栈是数组栈,即用一段连续的内存空间为栈提供空间。从数组栈的具体实现来看入栈的方式有四种做法:
- 空增:先写入数据,再让栈指针自增;(栈指针平时指向空)
- 空减:先写入数据,再让栈指针自减;(栈指针一开始指向栈顶)
- 满增:先让栈指针自增,再写入数据;(栈指针平时指向最高层数据)
- 满减:先让栈指针自减,再写入数据。(栈指针指向栈顶的上一个空位置)
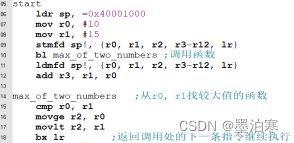
arm体系采用的方案是满减,但是在进行操作之前,我们必须告诉2440栈底的位置,这里我们把栈底设置为0x40001000,从地址0x40000000开始的0x1000这段内存空间对应的是2440内部的一段ram,总共4k。实际能够使用的内存空间为[0x40000000~0x40000FFF],设置栈底指针寄存器: ldr sp =0x40001000
6.1入栈保护指令stmfd(STMDB)
STMFD<c> <Rn>{!}, <registers>
其中Rn表示栈底指针寄存器,< registers >表示需要入栈保护的寄存器,!表示入栈之后sp自动自减。如:
stmfd sp!, {r0, r1, r2, r3-r12, lr} ;保护现场
6.2出栈恢复指令ldmfd(LDM/LDMIA/)
LDMFD<c> <Rn>{!}, <registers>
中Rn表示栈底指针寄存器,< registers >表示需要入栈保护的寄存器,!表示出栈之后sp自动自增。如:
ldmfd sp!, {r0, r1, r2, r3-r12, lr} ;恢复现场
7.汇编与C语言代码互相调用规则
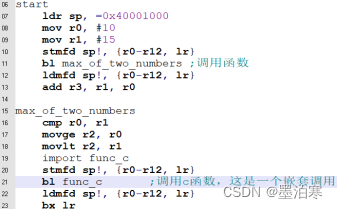
7.1在汇编中调用c语言编写的函数
设有c语言定义的函数void func_c(void);在汇编代码中调用该函数,只需用import(导入)声明函数名即可,之后就可以使用bl指令调用该函数,注意,既然是调函数,就一定要保护现场。
7.2 向c函数传参
向c函数传参的方法很简单,如果参数个数小于等于4个,就直接用r0~r3传参,c函数返回值通过r0寄存器返回:
设有c函数:
int add_c(int a, int b, int c, int d)
{
return a + b + c + d;
}
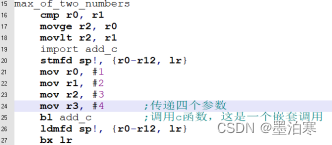
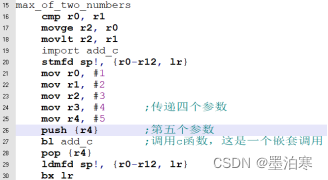
如果参数个数大于4个,从第五个参数开始就需要通过栈来传参(前4个参数传参,通过r0-r3传参,返回值用r0传参)
在c语言中调用汇编编写的函数类似,不过在汇编中用export声明函数,同时需要在c语言中用extern声明函数,按照标准,调用者负责保护现场和恢复现场
传参方法于此类似
8.切换ARM内核的工作模式
mrs:读取CPSR的状态;
msr:写入CPSR寄存器。
切换工作方式的思路很简单,由于内核的工作模式是由cpsr寄存器的低5位来设置的,那么就可以先把cpsr读出来,更改低5位之后再设置进去。这里读取cpsr使用mrs指令,写cpsr寄存器用msr指令,需要注意的是在keil环境下写cpsr需要写成: msr cpsr_c r0;将r0的值写入到cpsr寄存器















 2152
2152











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









