






基于起始点位置建立局部坐标系,返回值transform是局部系到世界系的转换矩阵[x,y,z];
x轴指向当前点的东方向。
y轴指向当前点的北方向。
z轴在椭圆体的方向轴指向表面法线穿过的位置。
常见应用:模型姿态调整(先转成局部坐标,然后进行平移、缩放、旋转等矩阵变换,操作之后的矩阵赋给模型即可)、建立debugModelMatrixPrimitive
Cesium.Transforms.eastNorthUpToFixedFrame(position);///Cesium.EllipsoidGraphics:
Cesium学习六:使用entity绘制ellipsoid_cesium ellipse_小何又沐风的博客-CSDN博客
minimumClock和maximumClock
下图分别为PI/4到PI/2、PI/4到3PI/2对应的椭球
夹角为与朝东的X轴的角度,逆时针(朝北)旋转为正

minimumCone和maximumCone
下图分别为PI/4到PI/2、PI/4到3PI/4对应的椭球
夹角为与垂直地表朝上的轴的角度,顺时针(朝下)旋转为正

/// Cesium.Camera
frustum.toRadians(视锥体宽度与其高度的纵横比)
已知俯仰角与航偏角,利用tan函数可以求锥体屏幕的宽和高,例:
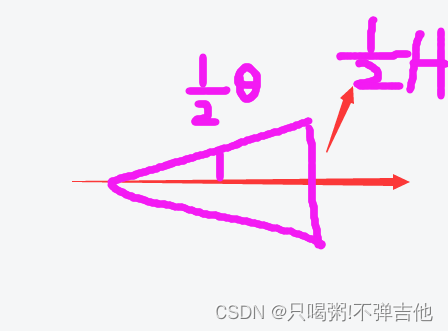
const hr = Cesium.Math.toRadians(options.horizontalViewAngle);
const vr = Cesium.Math.toRadians(options.verticalViewAngle);
//设置视锥体宽度与其高度的纵横比
this.lightCamera.frustum.aspectRatio =
(visualRange * Math.tan(hr / 2) * 2) /
(visualRange * Math.tan(vr / 2) * 2);/// ///















 254
254











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









