







三个前提假设:
- 局部均匀。每个点周围最近和最远的点的距离比均小于一定的值,该值假定为u。假设1是为了保证在局部生长时,尽可能地找到周围应该连接的顶点。
- 两个表面之间的最近距离应该保证一定阈值(um)以上,其中m为某点到其所在表面最近点的距离。每个点的m是不一样的,具体的计算见步骤3。
- 物体表面是相对平滑的,一个顶点链接的两个三角形之间的法向量不超过90度。假设2和假设3的目的见下所述。
四种点类型:
- 自由点(free):没有与任何三角形连接的点。
- 边缘点(fringe):没有被选择成为参考点的普通边缘点。
- 边界点(boundary)已经被选择称为过参考点的边缘点。之所以该点还是边缘点,可能是由于角度准则等原因,未连接一部分顶点,造成该点成为边缘点。
- 完成点(completed):完成了连接的点,且不位于边界线上。
上述四类不包括参考点,参考点是每次迭代时,从边缘点中选择出进行该点周围区域三角剖分的顶点。
两条执行准则:
- 任何的自由点、边缘点和边界点都不可以在三角形的内部。(这里有点疑惑,完成点可以,应该也不可以啊?)
- 每次迭代结束的时候,参考点成为一个边界或完全点。
七步执行过程:
- 使用一个桶分类的方式来存储所有的输入顶点。使用一个2D像素矩阵保存所有的顶点,相同像素坐标的顶点按照深度进行排序。其实就是类似于PPLL算法。这个步骤是一个全局的操作,为了便于进行下一步的粗过滤。
- 初始状态,任选一个点作为参考点。
- 寻找参考点周围可被连接的点,这里我们简称为感兴趣点。从全局的顶点中寻找到感兴趣点,包含粗过滤和细过滤两个步骤。粗过滤:寻找每个参考点指定范围内的点。首先利用步骤1中得到的桶进行快速的排除。以参考点作为中心,um作为半径检查一个轴对称框内的顶点。选择出此框内的所有自由点、边界点和边缘点。细过滤:通过粗过滤的顶点,如果到参考点的空间欧氏距离(就是三维距离)小于um,那么通过细过滤,将进行下一步的三角化,即细过滤的范围说一个球,此范围表示未SR。在计算每个参考点的m时,如果参考点是自由点(初始),则是范围内的最近点距离;如果参考点是边界点,则m为已连接线的最短距离。通过细过滤的感兴趣点集合成为CR。
- 将参考点和感兴趣点沿着法向量方向投影到一个二维平面上。每个二维平面上的投影点与三维点一一对应。
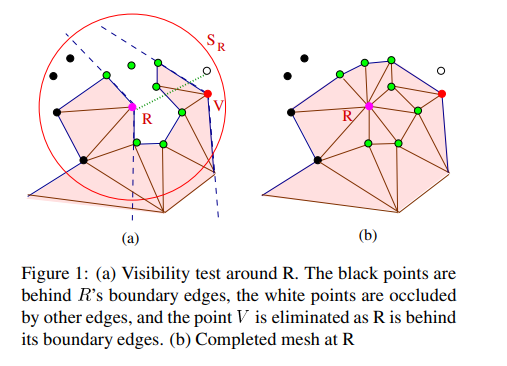
- 进行角度的排序。每个感兴趣点与参考点形成一个向量,这个方向与X轴方向形成一个夹角,按照此夹角对感兴趣点进行排序。理论上顺序连接这些感兴趣点和参考点,形成三角形。为了避免三角形的重叠和自交叉,只有通过点可见性测试的感兴趣点才能参与三角化。此外如果只是通过角度进行连接,往往会形成很多狭长的三角形。为了优化三角形的质量,需要按照角度准则进行处理。
- 三角化:顺序连接。但是如果感兴趣点和参考点形成的角度超过了最大角度,将不会被连接形成一个三角形。这个最大角度描述了模型中孔洞的特性,通常设置为120°。然后将所有CR中的自由点被标记为fringe点,添加到fringe点队列中。
- 从fringe队列中选择一个作为参考点,重复(2)-(6)。
假设2和假设3正是为了满足(4)和(5)步骤,避免投影后的点出现乱序。如果没有假设2,那么两层的点被视为同一层的点进行连接,造成很大的形状错误。如果没有(3),那么点的法向量与每个面的法向量差异将会很大。不正确的方向投影很大程度,会造成点的错误重叠(投影后点的顺序和真实的面上顺序不一致)。
点可见性测试:(1)位于参考点边界确定的不可见区域外的感兴趣点不参与连接;(2)如果参考点位于感兴趣点边界确定的不可见区域,感兴趣点不参与连接;(3)感兴趣点和参考点的连线与其他边有交叉,不参与连接。为了简化检测,这里可以只检测连线和SR范围内边界线的相交情况,无需与所有SR范围内的线进行相交检测,论文有证明。简单理解即:穿过内部的边,一定需要穿过边界的边,因此检测边界边即可)。
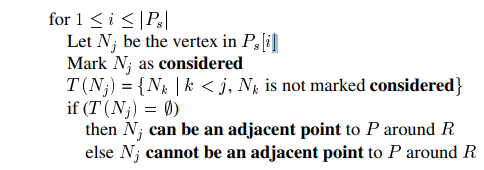
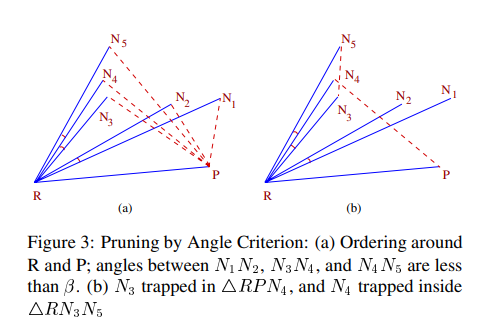
角度准则:如果形成的三角形小于设置的最小角度,那么这个三角形倾向于不保留。在连接时将去除该三角形的一个或两个感兴趣点。但去除的前提是去除了感兴趣点,剩余感兴趣点形成的三角形集合内部不能存在该感兴趣点。论文中给出了一种简单的伪代码。如下所示简而言之,感兴趣点按照参考点R进行排序,然后感兴趣点再按照点P进行排序。如果一点N按照P的排序小于在R下的排序,则说明RPN内部会存在其他感兴趣点,因此不能直接连接RPN。如果所示的RPN5内部会存在N4和N3,因此不能连接RPN5,以此类推。
PCL代码实现:
首先根据点云计算法向量,然后创建算法对象并设置算法参数,最后调用reconstruct接口获得接口。从参数设置上可见PCL中的实现比原论文更为复杂,如支持设置边的最大长度、感兴趣点的上限等,支持更精细的过滤。
#include<iostream>
#include<pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include<pcl/point_types.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/features/normal_3d.h>
#include <pcl/io/obj_io.h>
#include <pcl/surface/gp3.h>
#include <pcl/visualization/pcl_visualizer.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::PCLPointCloud2 cloud_blob;
//*打开点云文件
if (pcl::io::loadPCDFile(argv[1], cloud_blob) == -1) {
PCL_ERROR("Couldn't read file rabbit.pcd\n");
return(-1);
}
pcl::fromPCLPointCloud2(cloud_blob, *cloud);
//法线估计对象 使用PCA算法来计算法向量
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> n;
//存储估计的法线
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
//定义kd树指针
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
n.setInputCloud(cloud);
n.setSearchMethod(tree);
n.setKSearch(20);
//估计法线存储到其中
n.compute(*normals);//Concatenate the XYZ and normal fields*
pcl::PointCloud<pcl::PointNormal>::Ptr cloud_width_normals(new pcl::PointCloud<pcl::PointNormal>);
//链接字段
pcl::concatenateFields(*cloud, *normals, *cloud_width_normals);
//定义搜索树对象
pcl::search::KdTree<pcl::PointNormal>::Ptr tree2(new pcl::search::KdTree<pcl::PointNormal>);
//点云构建搜索树
tree2->setInputCloud(cloud_width_normals);
//定义三角化对象
pcl::GreedyProjectionTriangulation<pcl::PointNormal> gp3;
//存储最终三角化的网络模型
pcl::PolygonMesh triangles;
gp3.setSearchRadius(200.0f);//设置连接点之间的最大距离,(即是三角形最大边长)
//设置各种参数值
gp3.setMu(2.5f);
gp3.setMaximumNearestNeighbors(100);
gp3.setMaximumSurfaceAngle(M_PI_4);//45°,共同顶点三角形角度
gp3.setMinimumAngle(M_PI / 18);
gp3.setMaximumAngle(2 * M_PI / 3);
gp3.setNormalConsistency(false);
//设置搜索方法和输入点云
gp3.setInputCloud(cloud_width_normals);
gp3.setSearchMethod(tree2);
//执行重构,结果保存在triangles中
gp3.reconstruct(triangles);
//保存网格图
//pcl::io::saveOBJFile("result.obj", triangles);
std::string output_dir = "cloud_mesh.ply";
std::string sav = "saved mesh in:";
sav += output_dir;
pcl::console::print_info(sav.c_str());
std::cout << std::endl;
//保存为ply文件格式
pcl::io::savePLYFileBinary(output_dir.c_str(), triangles);
// 显示结果图
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("MAP3D MESH"));
////设置背景;
viewer->setBackgroundColor(0, 0, 0);
//设置显示的网格
viewer->addPolygonMesh(triangles, "my");
//viewer->initCameraParameters();
while (!viewer->wasStopped()) {
viewer->spin();
}
std::cout << "success" << std::endl;
return 0;
}参考文献:
A Fast and Efficient Projection-Based Approach for Surface Reconstruction(Sci-Hub | | 10.1109/sibgra.2002.1167141)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









