







到目前为止,我们建立的模型,其实都是独立的,并没有内在的关联性。通过层级建模,我们可以实现更多精彩的模型联动效果。
图符和实例
我们之前建立了很多模型,包括:
- 几何对象:物体的几何表示
- 材质模型:反射系数等
- 光源模型:光源颜色等
- 虚拟照相机
对于大多数图形API来说,采取最小完备的观点,即:
- 只包含少数的基本图元
- 让用户通过这些基本的图元来构建更复杂的对象,这些基本的图元就被称作图符
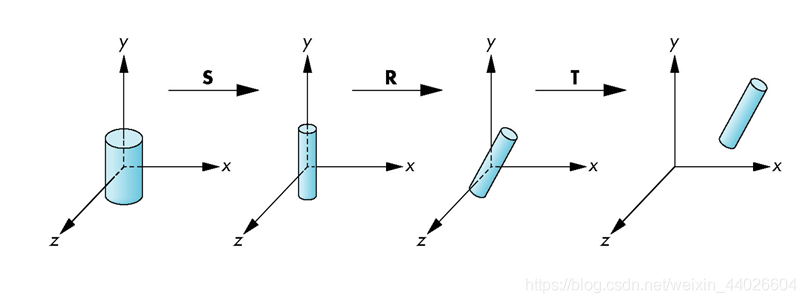
在OpenGL应用程序中,必须通过几何变换把图符从建模标架变换到世界标架,得到一个实例
实例变化把每个图符实例按照所需的大小,方向和位置放入到场景中:𝑴= 𝑻𝑹𝑺
这样就有了模型实例,但对象之间的关系还没建立起,还需要下面的层次建模。
层级模型——以机械臂的实现为例
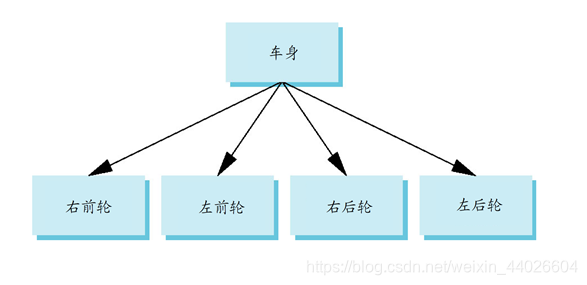
层级模型其实核心就是要建立起层次树,需要确定把哪种信息放在节点上,哪种信息放在边上。一般而言,以节点代表要绘制的实例,边上存储变换矩阵。例如:
对于机器人手臂,部件之间通过关节连接在一起,通过关节角指定模型的状态,最开始有三个模型对象:
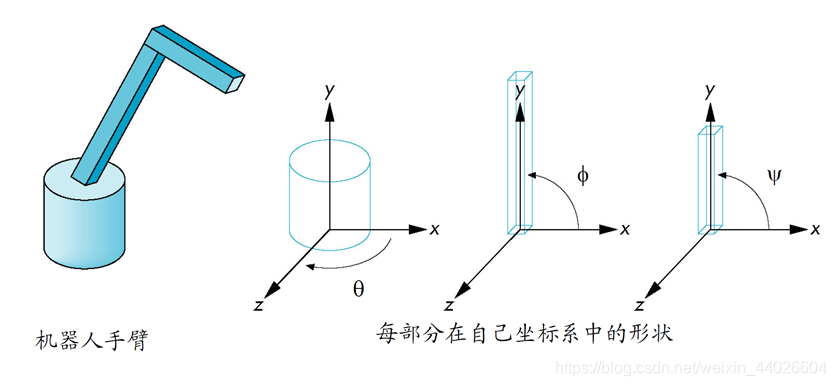
其运动自由度定义为:
- 支架可以独立旋转
- 下臂与支架相连,位置与支架旋转有关,会随着支架运动,而它的位置也必须相对于支架平移
- 上臂与下臂相连,位置与支架和下臂的位置有关,会随着下臂运动,且还应相对下臂平移
实例变换矩阵
- 支架的旋转:𝑅_b
把M = 𝑅_𝑏应用到支架上

- 下臂相对于支架部分部分平移:𝑇_𝑙𝑎
下臂绕关节旋转:𝑅_𝑙𝑎
把M=𝑅_𝑏 𝑇_𝑙𝑎 𝑅_𝑙𝑎 应用到下臂上
- 上臂相对于下臂平移:𝑇_𝑢𝑎
上臂绕关节旋转:𝑅_𝑢𝑎
把M=𝑅_𝑏 𝑇_𝑙𝑎 𝑅_𝑙𝑎 𝑇_𝑢𝑎 𝑅_𝑢𝑎 应用到上臂上

伪代码:
model_view = RotateY(Theta[Base] ); //支架变换矩阵
base(); //绘制支架
model_view = model_view * Translate(0.0, BASE_HEIGHT, 0.0)
* RotateZ(Theta[LowerArm]); //下臂变换矩阵
lower_arm(); //绘制下臂
model_view = model_view * Translate(0.0, LOWER_ARM_HEIGHT, 0.0)
* RotateZ(Theta[UpperArm]); //上臂变换矩阵
upper_arm(); //绘制上臂
这就够了吗?看情况。如果你图元是默认的,这样就好了,但如果图元本身还有变换,则应该乘上图元本身的模型矩阵,伪代码如下:
void upper_arm()
{
mat4 instance = Translate( 0.0, 0.5 * UPPER_ARM_HEIGHT, 0.0 )
* Scale(UA_WIDTH, UA_HEIGHT, UA_WIDTH ) ;
//按长宽高缩放正方体,并且平移使得底面在y=0上
glUniformMatrix4fv(ModelView, 1, GL_TRUE, model_view * instance );
//将完整的模-视矩阵传给shader
glDrawArrays( GL_TRIANGLES, 0, NumVertices ); //绘制相应的三角面片
}
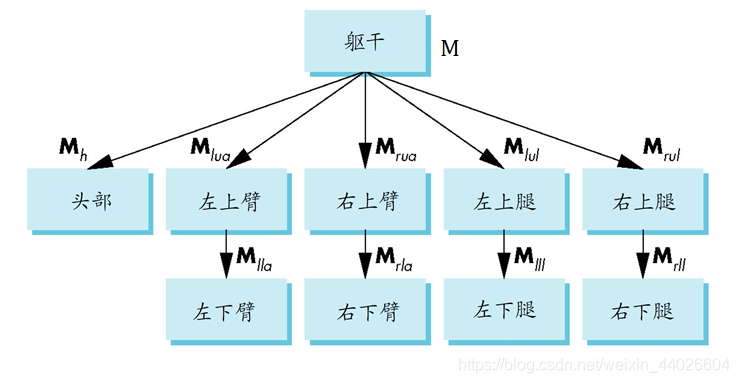
层级模型——以机器人的实现为例
我们直接采用树的先序遍历即可:

以史蒂夫为例,其层次树为:
其绘制的伪码是:
// modelview初始化是单位阵
void paintRobot(mat4 modelview) {
/*
modelview = modelview*局部变换矩阵
*/
/*
绘制
*/
/*
if (还有部位没画) {
paintRobot(modelview)
}
*/
}
我们还是问一句,这够了吗?同样,还是看情况。如果你图元是默认的,这样就好了,但如果图元本身还有变换,则应该乘上图元本身的模型矩阵。但对于机器人来说,如果没设置模型矩阵,出来的效果会很奇怪。伪代码如下:
void upper_arm()
{
mvstack.push( model_view ); //保存当前模-视变换矩阵
mat4 instance = Translate( 0.0, 0.5 * UPPER_ARM_HEIGHT, 0.0 )
* Scale(UA_WIDTH, UA_HEIGHT, UA_WIDTH ) ;
//按长宽高缩放正方体,并且平移使得底面在y=0上
glUniformMatrix4fv(ModelView, 1, GL_TRUE, model_view * instance );
//将完整的模-视矩阵传给shader
colorCube(); // 给部件赋色
glDrawArrays( GL_TRIANGLES, 0, NumVertices ); //绘制相应的三角面片
model_view = mvstack.pop(); //恢复当前模-视变换矩阵
}

















 1301
1301

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









