






本文章是关于CS61b课程的部分算法总结
图的定义:
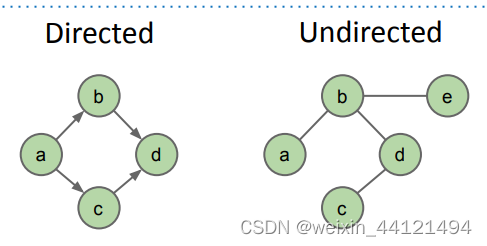
图由一系列节点和边组成,每个边连接两个节点,由一条边连接的节点称为相邻结点。其中如果一个图满足以下条件:边不可以两端连接同一个结点(不能有节点连接自身);不能有两根边连接两个相同节点(即两节点平行),则称为该图为simple graph(简单图)。(注:所有的树结构都是图)
另外,如下所示,图分为有向图和无向图。
图的遍历
图的遍历是图最常见的一种算法,用于解决节点相连等问题。遍历主要分为深度优先遍历、广度优先遍历,
深度优先遍历(Depth-First Traversal):
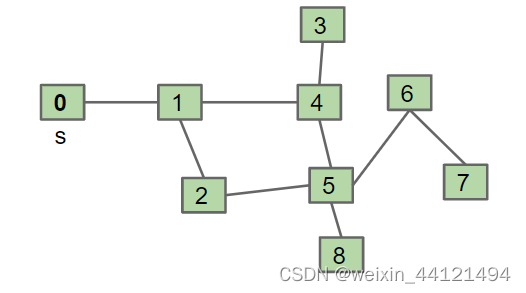
从一个图中某个顶点V出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和V有路径相通的顶点都被访问到。深度优先遍历针对一个邻居,总是优先遍历这个邻居的到最深处。如下图所示,如果从0开始遍历,如果一个节点有多个子节点,那么总是优先遍历数值较小的节点,那么下图使用DFT的遍历顺序如下:
0——1——2——5——4——3
到达3之后由于没有未被遍历的相邻节点了,所以向上找,找到5,然后继续遍历
6——7,同样的,再次向上,最后遍历8。遍历结束。
广度优先遍历(BreadthFirstTraversal):
指的是从图的一个未遍历的节点出发,先遍历这个节点的相邻节点,再依次遍历每个相邻节点的相邻节点。
如下图所示,如果从0开始遍历,如果一个节点有多个子节点,那么总是优先遍历数值较小的节点,那么下图按照BFT的访问顺序则为
0——1——2——4——5——3——6——8——7
最短路径
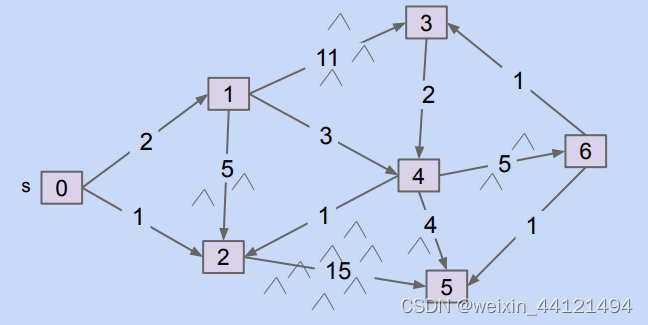
对于边的权重不同可以为边添加weight数值,如下所示。如果对于这样的图,想要找从一点s到另一点t的权重最短的路径,称为最短路径问题(shortest path)。解决方法有Dijkstra’s 算法和 A*算法。
Dijkstra’s 算法:
从一个节点出发,道道其余所有节点的最短路径是一个树结构,称之为最短路径树。最短路径树种访问每个节点的路径都是唯一的,且是最短的。Dijkstra的算法如下:首先需要一个节点距离出发点的距离d数据,一个一个在最短路径树中的上一个节点数据,即为edgeTo
1、初始化所有节点距离远点的距离数据D,出发点s的距离为0,其余为正无穷。并将edgeTo 设为null。
2、从队列中取出最近的结点(第一次即S),计算该结点到其相邻结点的距离。
3、将该距离加上其与相邻节点间的距离则为相邻节点到原点的距离,比较该如果比已经有的数据更近,则更新该数据并重新排序。然后更新edgeTo的数据,将edgeto设为2中取出的节点。
4、重复上述过程直至所有节点都被访问到。
故上图的遍历结果如下:初始化后,从中取出S,距离为0,更新其相邻节点1,2的数据,更新后如下
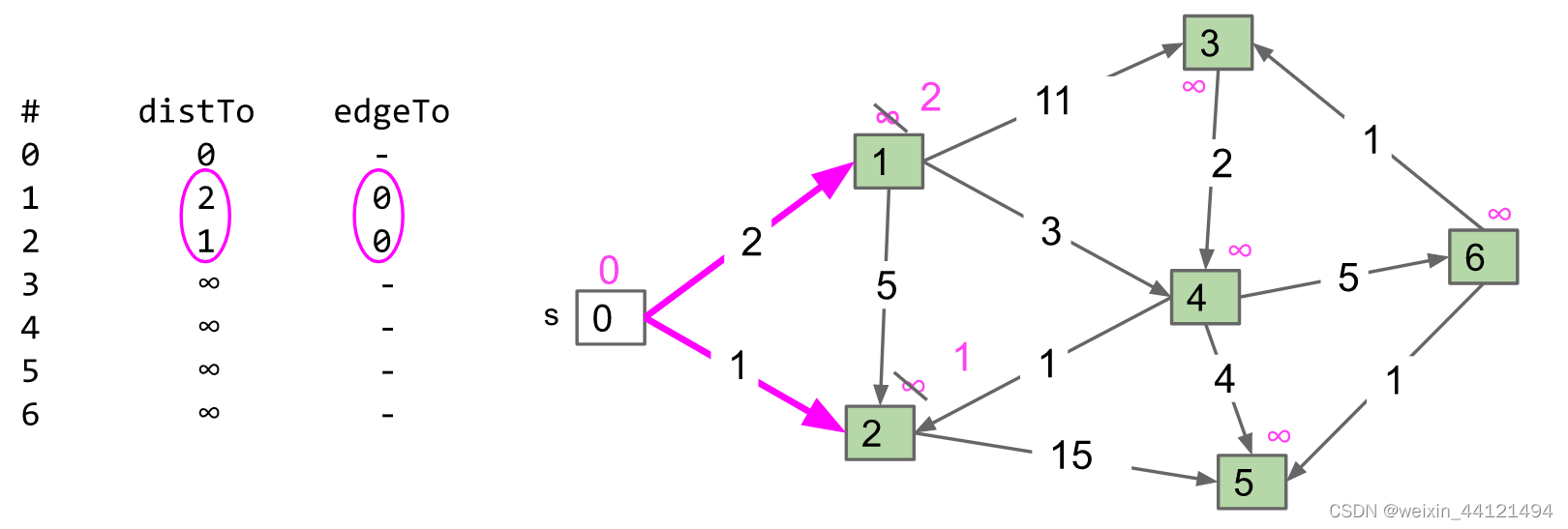
计算s到其下属结点的距离,到1的d 为2,到2的d为1,更新该数据,并排序;
现在距离最小的为1,结点2,计算2到期下属结点的距离并更新,2到5的距离为15,故更新5经到出发点的距离为1+15 = 16< 正无穷。 故更新5的数据,d = 16,edgeTo = 2并排序。
现在距离s最近的是结点1,距离为2,将其拿出并计算。其到下苏3,4,2的距离更新并计算。
1到2:2+5>1,不更新
1到3:2+11<无穷,更新,D = 2+11 = 13,edgeTo 改为1,同理4也更新,d = 2+3 = 5,edgeTo改为1.
现在距离s的最短结点为4,,距离为5,故更新到5,6的距离和edgeTo:
5没有下属结点,将6拿出,更新3,得到全部结点。获得shortest path tree。
全部遍历结束后的结果:
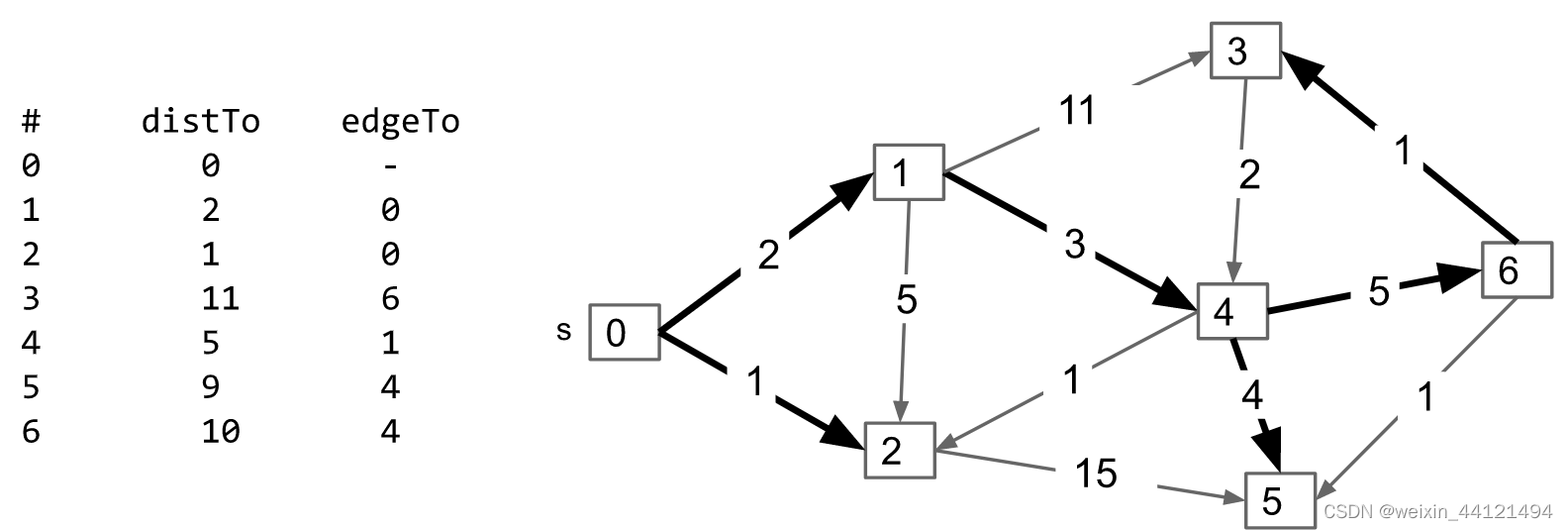
这样就根据Dijkstra算法得到了最短路径树,也就解决了开头提出的从一个节点到达其他节点的最短路径问题。
A*算法
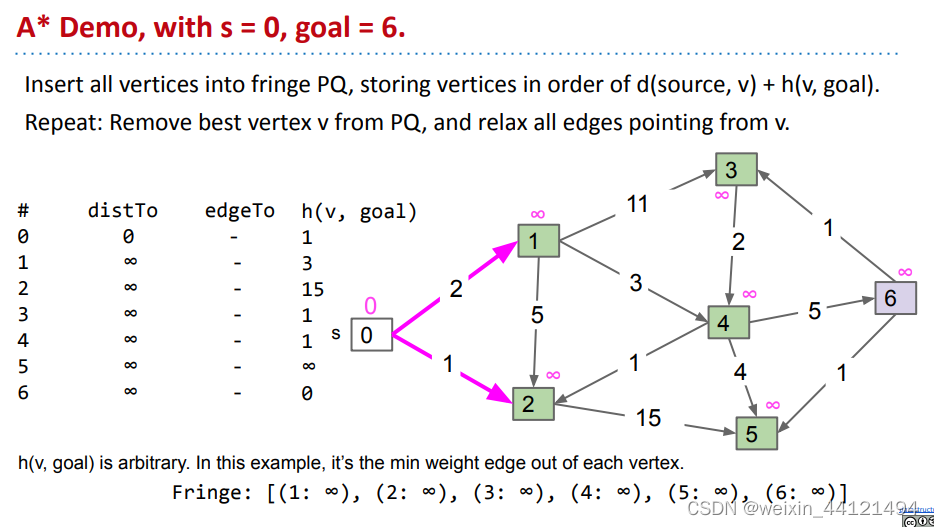
相比于Dijkstra算法,A*算法引入了评价函数估计函数H()的概念,该函数能够基于其他算法估计一个节点与目标节点之间的距离。其准确性不高。
下图中H即为节点v,距离goal之间的距离,和dijkstra类似的,将从0出发到达节点V的距离记为D,上一个节点记为edgeto,V到目标节点的距离记为H,按照H+D的大小进行排序,从最小距离开始遍历。
遍历结束后的更新状态为: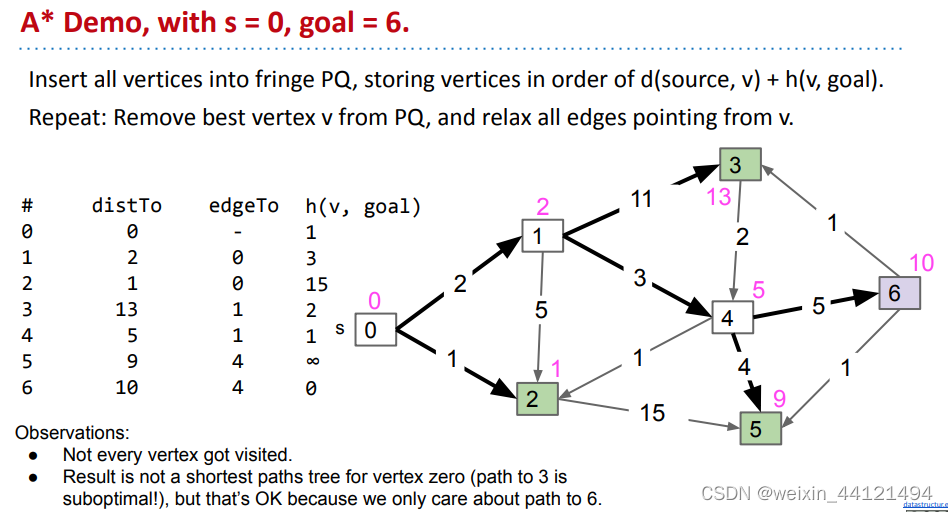
由此就得到了从原点到达目标的最终最短路径。















 1072
1072











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









