线程同步
同步概念
所谓同步,即同时起步,协调一致。不同的对象,对“同步”的理解方式略有不同。如,设备同步,是指在两
个设备之间规定一个共同的时间参考;数据库同步,是指让两个或多个数据库内容保持一致,或者按需要部
分保持一致;文件同步,是指让两个或多个文件夹里的文件保持一致。等等,而编程中、通信中所说的同步
与生活中大家印象中的同步概念略有差异。“同”字应是指协同、协助、互相配合。主旨在协同步调,按预定
的先后次序运行。
线程同步
同步即协同步调,按预定的先后次序运行。
线程同步,指一个线程发出某一功能调用时,在没有得到结果之前,该调用不返回。同时其它线程为
保证数据一致性,不能调用该功能。
“同步”的目的,是为了避免数据混乱,解决与时间有关的错误。实际上,不仅线程间需要同步,进程
间、信号间等等都需要同步机制。因此,所有“多个控制流,共同操作一个共享资源”的情况,都需要同步。
数据混乱原因
1. 资源共享(独享资源则不会)
2. 调度随机(意味着数据访问会出现竞争)
3. 线程间缺乏必要的同步机制。
以上 3 点中,前两点不能改变,欲提高效率,传递数据,资源必须共享。只要共享资源,就一定会出现竞争。
只要存在竞争关系,数据就很容易出现混乱。
所以只能从第三点着手解决。使多个线程在访问共享资源的时候,出现互斥。
互斥量 mutex
Linux 中提供一把互斥锁 mutex(也称之为互斥量)。
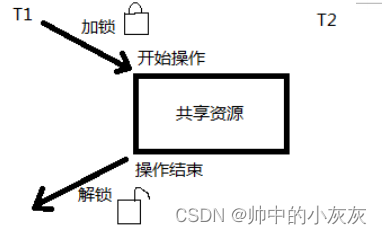
每个线程在对资源操作前都尝试先加锁,成功加锁才能操作,操作结束解锁。资源还是共享的,线程
间也还是竞争的,但通过“锁”就将资源的访问变成互斥操作,而后与时间有关的错误也不会再产生了。
但,应注意:同一时刻,只能有一个线程持有该锁。
当 A 线程对某个全局变量加锁访问,B 在访问前尝试加锁,拿不到锁,B 阻塞。C 线程不去加锁,而直接访问
该全局变量,依然能够访问,但会出现数据混乱。
所以,互斥锁实质上是操作系统提供的一把“建议锁”(又称“协同锁”),建议程序中有多线程访问共享资源
的时候使用该机制。但,并没有强制限定。
因此,即使有了 mutex,如果有线程不按规则来访问数据,依然会造成数据混乱。
主要应用函数
pthread_mutex_init 函数
pthread_mutex_destroy 函数
pthread_mutex_lock 函数
pthread_mutex_trylock 函数
pthread_mutex_unlock 函数
以上 5 个函数的返回值都是:成功返回 0, 失败返回错误号。
pthread_mutex_t 类型,其本质是一个结构体。为简化理解,应用时可忽略其实现细节,简单当成整数看待。
pthread_mutex_t mutex; 变量 mutex 只有两种取值 1、0。
pthread_mutex_init 函数
初始化一个互斥锁(互斥量) ---> 初值可看作 1
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
pthread_mutex_destroy 函数
销毁一个互斥锁
int pthread_mutex_destroy(pthread_mutex_t *mutex);
pthread_mutex_lock 函数
加锁。可理解为将 mutex--(或 -1),操作后 mutex 的值为 0。
int pthread_mutex_lock(pthread_mutex_t *mutex)
pthread_mutex_unlock 函数
解锁。可理解为将 mutex ++(或 +1),操作后 mutex 的值为 1。
int pthread_mutex_unlock(pthread_mutex_t *mutex);
pthread_mutex_trylock 函数
尝试加锁
int pthread_mutex_trylock(pthread_mutex_t *mutex);
加锁与解锁
lock 与 unlock:
lock 尝试加锁,如果加锁不成功,线程阻塞,阻塞到持有该互斥量的其他线程解锁为止。
unlock 主动解锁函数,同时将阻塞在该锁上的所有线程全部唤醒,至于哪个线程先被唤醒,取决于优先级、调
度。默认:先阻塞、先唤醒。
例如:T1 T2 T3 T4 使用一把 mutex 锁。T1 加锁成功,其他线程均阻塞,直至 T1 解锁。T1 解锁后,T2 T3 T4 均被唤醒,并自动再次尝试加锁。
可假想 mutex 锁 init 成功初值为 1。lock 功能是将 mutex--。而 unlock 则将 mutex++。
lock 与 trylock:
lock 加锁失败会阻塞,等待锁释放。
trylock 加锁失败直接返回错误号(如:EBUSY),不阻塞。
死锁
1. 线程试图对同一个互斥量 A 加锁两次。
2. 线程 1 拥有 A 锁,请求获得 B 锁;线程 2 拥有 B 锁,请求获得 A 锁
读写锁
与互斥量类似,但读写锁允许更高的并行性。其特性为:写独占,读共享。
读写锁状态:
特别强调:读写锁只有一把,但其具备两种状态:
1. 读模式下加锁状态 (读锁)
2. 写模式下加锁状态 (写锁)
读写锁特性:
1. 读写锁是“写模式加锁”时, 解锁前,所有对该锁加锁的线程都会被阻塞。
2. 读写锁是“读模式加锁”时, 如果线程以读模式对其加锁会成功;如果线程以写模式加锁会阻塞。
3. 读写锁是“读模式加锁”时, 既有试图以写模式加锁的线程,也有试图以读模式加锁的线程。那么读写锁
会阻塞随后的读模式锁请求。优先满足写模式锁。读锁、写锁并行阻塞,写锁优先级高
读写锁也叫共享-独占锁。当读写锁以读模式锁住时,它是以共享模式锁住的;当它以写模式锁住时,它是以独
占模式锁住的。写独占、读共享。
读写锁非常适合于对数据结构读的次数远大于写的情况。
主要应用函数:
pthread_rwlock_init 函数
pthread_rwlock_destroy 函数
pthread_rwlock_rdlock 函数
pthread_rwlock_wrlock 函数
pthread_rwlock_tryrdlock 函数
pthread_rwlock_trywrlock 函数
pthread_rwlock_unlock 函数
以上 7 个函数的返回值都是:成功返回 0, 失败直接返回错误号。
pthread_rwlock_t 类型 用于定义一个读写锁变量。
pthread_rwlock_t rwlock;
条件变量
条件变量本身不是锁!但它也可以造成线程阻塞。通常与互斥锁配合使用。给多线程提供一个会合的场所。
主要应用函数:
pthread_cond_init 函数
pthread_cond_destroy 函数
pthread_cond_wait 函数
pthread_cond_timedwait 函数
pthread_cond_signal 函数
pthread_cond_broadcast 函数
以上 6 个函数的返回值都是:成功返回 0, 失败直接返回错误号。
pthread_cond_t 类型 用于定义条件变量
pthread_cond_t cond;
pthread_cond_init 函数
初始化一个条件变量
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
参 2:attr 表条件变量属性,通常为默认值,传 NULL 即可
也可以使用静态初始化的方法,初始化条件变量:
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
pthread_cond_destroy 函数
销毁一个条件变量
int pthread_cond_destroy(pthread_cond_t *cond);
pthread_cond_wait 函数
阻塞等待一个条件变量
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
函数作用:
1. 阻塞等待条件变量 cond(参 1)满足
2. 释放已掌握的互斥锁(解锁互斥量)相当于 pthread_mutex_unlock(&mutex);
1.2.两步为一个原子操作。
3. 当被唤醒,pthread_cond_wait 函数返回时,解除阻塞并重新申请获取互斥锁 pthread_mutex_lock(&mutex);
pthread_cond_timedwait 函数
限时等待一个条件变量
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec
*restrict abstime);
pthread_cond_signal 函数
唤醒至少一个阻塞在条件变量上的线程
int pthread_cond_signal(pthread_cond_t *cond);
pthread_cond_broadcast 函数
唤醒全部阻塞在条件变量上的线程
int pthread_cond_broadcast(pthread_cond_t *cond);
生产者消费者条件变量模型
线程同步典型的案例即为生产者消费者模型,而借助条件变量来实现这一模型,是比较常见的一种方法。假定
有两个线程,一个模拟生产者行为,一个模拟消费者行为。两个线程同时操作一个共享资源(一般称之为汇聚),
生产向其中添加产品,消费者从中消费掉产品。
条件变量的优点:
相较于 mutex 而言,条件变量可以减少竞争。
如直接使用 mutex,除了生产者、消费者之间要竞争互斥量以外,消费者之间也需要竞争互斥量,但如果汇聚
(链表)中没有数据,消费者之间竞争互斥锁是无意义的。有了条件变量机制以后,只有生产者完成生产,才会引
起消费者之间的竞争。提高了程序效率。
信号量
进化版的互斥锁(1 --> N)
由于互斥锁的粒度比较大,如果我们希望在多个线程间对某一对象的部分数据进行共享,使用互斥锁是没有办
法实现的,只能将整个数据对象锁住。这样虽然达到了多线程操作共享数据时保证数据正确性的目的,却无形
中导致线程的并发性下降。线程从并行执行,变成了串行执行。与直接使用单进程无异。
信号量,是相对折中的一种处理方式,既能保证同步,数据不混乱,又能提高线程并发。
主要应用函数:
sem_init 函数
sem_destroy 函数
sem_wait 函数
sem_trywait 函数
sem_timedwait 函数
sem_post 函数
以上 6 个函数的返回值都是:成功返回 0, 失败返回-1,同时设置 errno。(注意,它们没有 pthread 前缀)
sem_t 类型,本质仍是结构体。但应用期间可简单看作为整数,忽略实现细节(类似于使用文件描述符)。
sem_t sem; 规定信号量 sem 不能 < 0。头文件 <semaphore.h>
信号量基本操作
sem_init 函数
初始化一个信号量
int sem_init(sem_t *sem, int pshared, unsigned int value);
参 1:sem 信号量
参 2:pshared 取 0 用于线程间;取非 0(一般为 1)用于进程间
参 3:value 指定信号量初值
sem_destroy 函数
销毁一个信号量
int sem_destroy(sem_t *sem);
sem_wait 函数
给信号量加锁 --
int sem_wait(sem_t *sem);
sem_post 函数
给信号量解锁 ++
int sem_post(sem_t *sem);
sem_trywait 函数
尝试对信号量加锁 -- (与 sem_wait 的区别类比 lock 和 trylock)
int sem_trywait(sem_t *sem);
sem_timedwait 函数
限时尝试对信号量加锁 --
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
参 2:abs_timeout 采用的是绝对时间。
定时 1 秒:
time_t cur = time(NULL); 获取当前时间。
struct timespec t; 定义 timespec 结构体变量 t
t.tv_sec = cur+1; 定时 1 秒
t.tv_nsec = t.tv_sec +100;
sem_timedwait(&sem, &t); 传参

























 2218
2218











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









