








华为智界R7之所以能够获得成功,主要可以归结于以下几个关键因素:
-
强大的智能驾驶技术:智界R7搭载了华为ADS 3.0智驾系统,这一系统在拥堵路段或狭窄路段的表现非常出色,能够自动控制车速和车距,让车辆平稳地跟随前车行驶,有效缓解驾驶疲劳。在没有红绿灯的路口,智驾系统会自动检测横向来车和行人,确保安全情况下再通过,展现出高度智能化驾驶水平。
-
优秀的底盘质感:智界R7配备了华为深度参与研发的底盘系统,并配备CDC可变阻尼减震器和空气悬架,能够根据路况实时调整底盘软硬程度,兼顾舒适性和操控性。这种底盘调校让人赞叹不已,无论是经过颠簸路面还是高速过弯,智界R7都能够保持车身稳定,过滤掉大部分震动。
-
车内细节设计:智界R7的内饰设计充满科技感和人性化,中控台配备一块超大尺寸悬浮式中控屏,集成车辆各项功能控制,操作便捷流畅。此外,智界R7还配备HUD抬头显示功能,可以将车速、导航等重要信息投射到前风挡玻璃上,提升驾驶安全性。
-
市场定位和定价:智界R7在定价上进行了重新调整,带激光雷达、ADS 3.0版本的车型,价格在29万左右,非常合理。作为一台SUV车型,其完美规避了纯电车型舒适度不足、空间小的问题,让整车更适合日常使用。
-
华为品牌的号召力:智界R7的优势之一是华为自主研发的鸿蒙座舱系统以及ADS 3.0,这是很难被代替的,且华为本身就拥有很强的消费号召力。
-
产品力全面:智界R7在配置、空间、科技以及自动驾驶辅助能力方面非常强,配上主流的100kWh电池包,以及800V架构,属于一台完全体的纯电SUV。
-
高压碳化硅平台:智界R7搭载了HUAWEI DriveONE 800V的高压碳化硅平台,这套平台不仅具备总功率365kW,零百加速3.9秒的澎湃动力,更带来了超低的能耗表现。
-
华为自研热管理系统:智界R7此次搭载性能优异的华为自研智能热管理系统,通过不同组件的智能控制,大幅降低了电能消耗,相比传统的电加热器方式能耗可降低50%。
-
超低风阻设计:智界R7流畅的整车线条和优化的车身细节,实现了0.219的全球量产SUV超低风阻表现,为整车扎实续航奠定了坚实的基础。
这些因素共同作用,使得智界R7在市场上获得了成功,成为了特斯拉Model Y之后的现象级爆款。
🚗 智界R7的自动驾驶系统与其他品牌相比有何不同?

华为智界R7的自动驾驶系统与其他品牌相比,特别是与特斯拉Model Y的Autopilot系统相比,具有以下几个显著的不同之处:
-
端到端全新架构:
智界R7搭载的HUAWEI ADS 3.0高阶智能驾驶系统采用了端到端的全新架构,这种架构能够更好地模拟人类的决策过程,提供更为精准和人性化的决策,提升了车辆的智能驾驶体验。 -
超感感知能力:
智界R7配备了高达34个高精度传感器,包括激光雷达在内,实现了对周围环境的全方位无死角探测与响应,提供了近乎完美的驾驶辅助体验。 -
算力王者:
智界R7搭载了业界领先的高性能芯片——华为MDC 810,具备400 TOPS的强大计算能力和极强的并行处理效率,使得车辆能够实时应对复杂场景,确保各种环境下都能准确做出判断和执行动作。 -
软硬一体设计:
智界R7采用了一体化的设计和开发理念,这意味着硬件组件的高度协同以及软件平台的统一调度管理,从而让整个系统的性能和可靠性达到更高水平。 -
全栈自研算法库:
智界R7构建了一套完善的自研算法体系,包括深度学习、计算机视觉等多种先进技术在内的应用层算法,大大提高了智能化水平的上限空间。 -
持续迭代升级机制:
智界R7通过OTA在线远程更新功能不断地为用户提供更先进的功能和优化方案,使得产品始终保持在最佳状态并满足不断变化的市场需求。 -
车位到车位全场景贯通体验:
智界R7实现了业界首个商用的“车位到车位”智驾功能,用户可以从家里的停车位启动智能驾驶模式,一直行驶到目的地的停车场,期间无论是穿过环岛还是通过园区闸机,都能由系统自动完成。 -
全国都能开:
智界R7的HUAWEI ADS 3.0系统已经实现了“全国都能开、全国放心开”的体验,而特斯拉FSD在国内的落地应用还遥遥无期。 -
智能学习日常通勤路线:
智界R7的智能驾驶系统能够智能学习日常通勤路线,越开越顺,全新探路模式,没有车道线也可智能驾驶。 -
泊车更优雅:
智界R7支持泊车代驾,自行找车位泊车,让车主下车即走,点点手机,远程召唤车辆从停车位开到面前,用车更便捷。
综上所述,智界R7的自动驾驶系统在技术先进性、本土化适应性以及用户体验上都有其独特优势,这些特点使其在与特斯拉Model Y等其他品牌的自动驾驶系统相比时,展现出更强的竞争力。
🌐 智界R7的自动驾驶系统与其他国际品牌的对比分析有哪些?


智界R7的自动驾驶系统与其他国际品牌相比,具有以下几个显著的不同之处和优势:
-
技术路线和架构:
- 智界R7搭载的HUAWEI ADS 3.0智驾系统采用了全新端到端架构,能够作出更合理的驾驶决策,实现更类人、更安全、更高效的智能驾驶体验。相比之下,特斯拉主要走纯视觉路线,通过摄像头模拟人的双眼来识别目标。
-
对高精地图的依赖性:
- 智界R7支持不依赖高精地图的NCA智驾领航功能,即使在没有高精地图覆盖的区域,也能根据导航信息和实时感知的环境数据,实现智能驾驶辅助。而其他一些国际品牌可能更依赖于高精地图数据。
-
功能丰富度和实用性:
- 智界R7在功能的丰富度和实用性上具有明显优势,提供了更广泛的智能驾驶场景和更便捷的驾驶体验。相比之下,特斯拉Model Y的FSD在国内尚未开放,其自动驾驶辅助系统在实际使用中的功能和场景覆盖相对有限。
-
本土化适应性:
- 华为的智能驾驶解决方案更符合国内市场的实际需求,为用户提供了更加自由和广泛的智能驾驶体验。这使得智界R7在与Model Y的对比中,从一开始就占据了优势地位。
-
全场景贯通体验:
- 智界R7实现了业界首个商用的“车位到车位”智驾功能,用户可以从家里的停车位启动智能驾驶模式,一直行驶到目的地的停车场,期间无论是穿过环岛还是通过园区闸机,都能由系统自动完成。这种全场景贯通体验是其他国际品牌难以比拟的。
-
性价比:
- 智界R7在价格、空间尺寸、智驾系统、智能座舱以及充电补能等方面都展现出了强大的竞争力。相比之下,特斯拉Model Y在智能驾驶和智能底盘的功能丰富性略逊于智界R7,同时空间和豪华体验也存在明显短板。
综上所述,智界R7的自动驾驶系统在技术先进性、本土化适应性以及用户体验上都有其独特优势,这些特点使其在与特斯拉Model Y等其他国际品牌的自动驾驶系统相比时,展现出更强的竞争力。
🔍 智界R7的自动驾驶系统具体有哪些安全特性?
智界R7的自动驾驶系统在安全特性方面表现出色,以下是一些关键的安全特性:
-
全向防碰撞系统3.0(CAS 3.0):
- 智界R7搭载的全向防碰撞系统3.0具备全天候、全场景、全目标的识别能力,响应时间仅为200ms,能够识别横穿或斜穿的行人、车辆、二轮车,前方落石、锥桶、水马等障碍物,及对向来车炫光、夜间昏暗等场景,实现紧急制动,避免或降低碰撞风险。
-
AEB前向防碰撞功能:
- AEB系统不仅能够应对横穿行人和两轮车的紧急情况,还能够提前识别斜穿行人和两轮车,通过减速避免碰撞。
-
智能驾驶辅助:
- 在城市NCA场景中,智界R7搭载的华为192线激光雷达能够满足复杂环境下的高阶智能驾驶需求,显著提升了在复杂交通场景下的车辆通行效率和安全性。
-
车道保持和变道辅助:
- 智界R7能够在遇到占据一半以上车道的车辆时,通过横向避障来规避碰撞,展现了其卓越的安全性能。
-
智能泊车功能:
- 智界R7新增了泊车辅助的自定义靠左/靠右功能,用户可以根据自己的需求自定义泊车位置,无论是在超窄车位还是旁边车辆贴线停车的情况下,都能方便上下车。
-
车身结构安全:
- 智界R7采用了高强钢、潜艇级热成形钢、铝合金,材料的优越性使得智界R7在碰撞中展现出惊人的稳定性与安全性,高强钢、潜艇级热成型钢与铝合金的综合使用比例高达86.7%。
-
全方位安全气囊:
- 全车7个安全气囊,副驾驶气囊的面积比行业中的传统气囊更大,达到了130L,为乘客提供全方位的安全保护。
-
多重电池安全保护:
- 智界R7电池包的13层硬核防护,底部特别增设了3层特种防护,位置高于底盘最低位置,车底还设置了高强度防撞梁,以防止车辆托底对电池造成损害。
-
健康座舱:
- 配备负离子空气净化、CN95抗菌抑菌滤芯和驻车自动通风功能,保障车内空气清新。
这些安全特性共同构成了智界R7自动驾驶系统的安全保障,使其在智能驾驶的同时,也能够确保乘客和车辆的安全。
程序员在电动汽车行业,有哪些发展前景?
程序员在电动汽车行业的发展前景非常广阔,以下是一些具体的发展方向和领域:
-
电池技术突破:
程序员可以参与电池技术的研究和开发,特别是在正负极材料、电解液、隔膜、膜电极等关键核心技术的研究。随着固态电池和氢燃料电池技术的突破,程序员可以在电池管理系统(BMS)的软件开发中发挥作用,提升电池性能和安全性。 -
智能网联技术创新:
程序员可以在智能网联技术领域大展身手,开发复杂环境融合感知、智能网联决策与控制、信息物理系统架构设计等关键技术。这包括车载智能计算平台、高精度地图与定位、车辆与车外其他设备间的无线通信(V2X)、线控执行系统等核心技术和产品。 -
新能源汽车基础技术提升:
程序员可以参与车规级芯片、车用操作系统、新型电子电气架构、高效高密度驱动电机系统等关键技术和产品的研发。这些是新能源汽车核心技术攻关工程的一部分,对于提升电动汽车的性能至关重要。 -
自动驾驶技术:
随着智能化技术的不断完善,智能驾驶系统的渗透率逐步提升,为驾驶者带来了更加便捷、安全的行车体验。程序员可以在自动驾驶算法、传感器融合、机器学习等领域发挥重要作用。 -
车联网技术:
程序员可以参与车联网技术的开发,实现车辆与外部环境的智能互联,包括车辆与车辆(V2V)、车辆与基础设施(V2I)等通信技术。 -
绿色可持续发展:
程序员可以参与电池技术的改进,降低环境污染风险,提高能效和使用寿命。这包括开发更高效的电池回收和再利用系统。 -
全球化布局:
随着电动汽车市场的全球化,程序员可以参与跨国企业间的合作与竞争,推动电动汽车行业的全球化进程。 -
软件和服务创新:
随着新能源汽车配套设施逐步完善,下沉市场成为新能源车新发展机遇。程序员可以开发更多创新的软件和服务,以满足不同市场的需求。 -
应对挑战的策略:
面对原材料供应的稳定性、电池回收与再利用的环保问题、充电基础设施的建设与分布不均等挑战,程序员可以通过技术创新提供解决方案。
综上所述,程序员在电动汽车行业的发展前景非常广泛,涉及技术创新、智能化、全球化等多个领域,为行业的发展提供了强有力的技术支持。
🚗 自动驾驶技术中,哪些算法是最前沿的?
自动驾驶技术中,最前沿的算法主要集中在以下几个领域:
-
端到端自动驾驶:
端到端自动驾驶是指利用原始传感器输入直接生成车辆运动规划的算法框架方法。这种方法与模块化pipeline相比,受益于感知和规划的联合特征优化。今年的CVPR最佳论文就颁给了端到端自动驾驶,这几乎代表着一种共识:端到端自动驾驶是行业的未来。 -
深度强化学习(DRL):
深度强化学习在自动驾驶领域得到了加强,特别是在控制层面,代理需要在每一个瞬间做出动作决策,这些决策可能会改变场景条件。强化学习(RL)通过一个代理来完成行动策略,代理的目标是最大化在其生命周期内收到的累积奖励。 -
多目标跟踪(MOT):
在自动驾驶领域,多目标跟踪是指对在不同时刻观测到的多个目标,进行关联和跟踪,以便获得每个目标的位置/轨迹、速度、方向等状态信息,服务于下游的规划、预测、决策等模块。MOT是自动驾驶中最为基础和重要的能力之一。 -
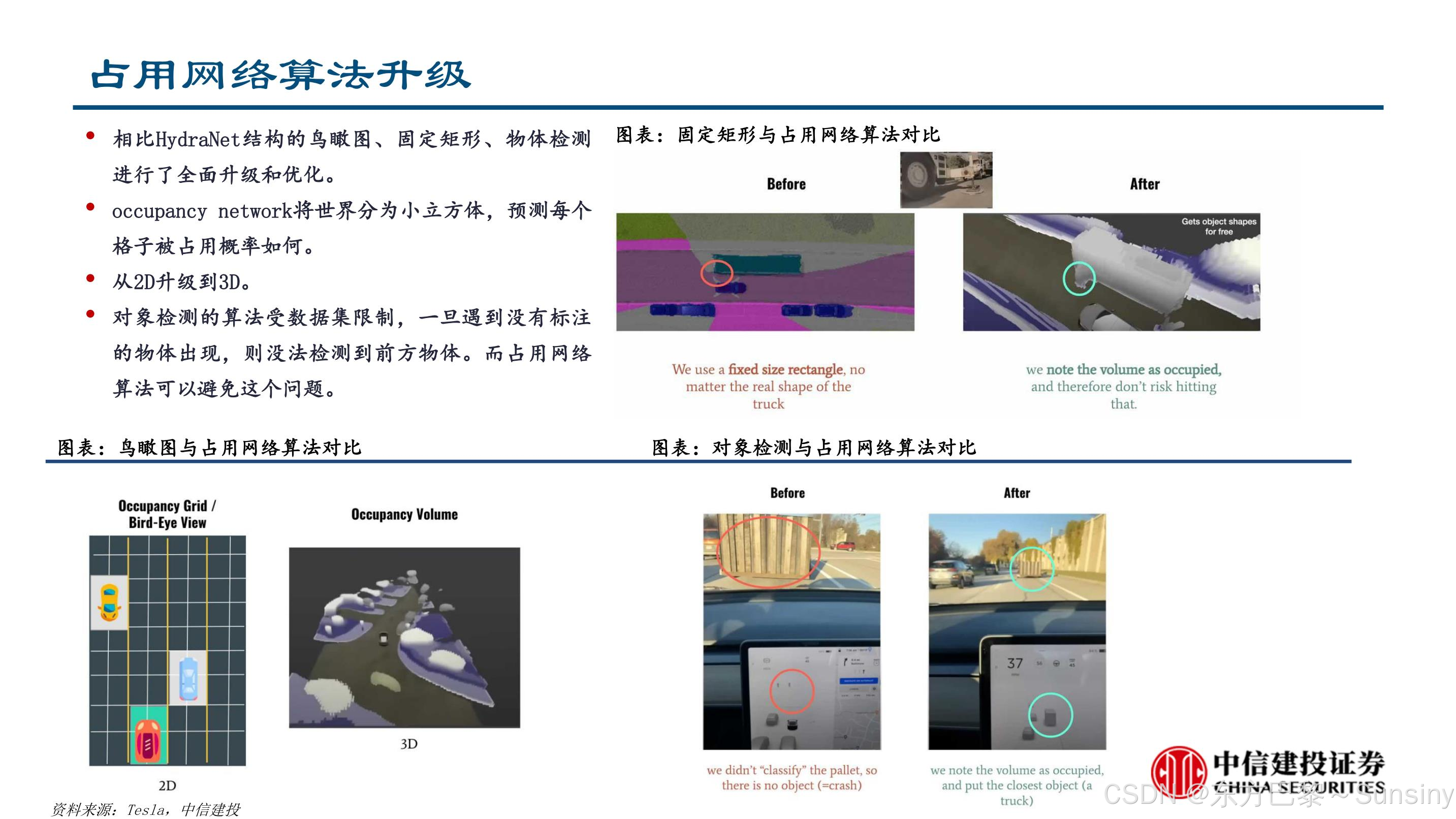
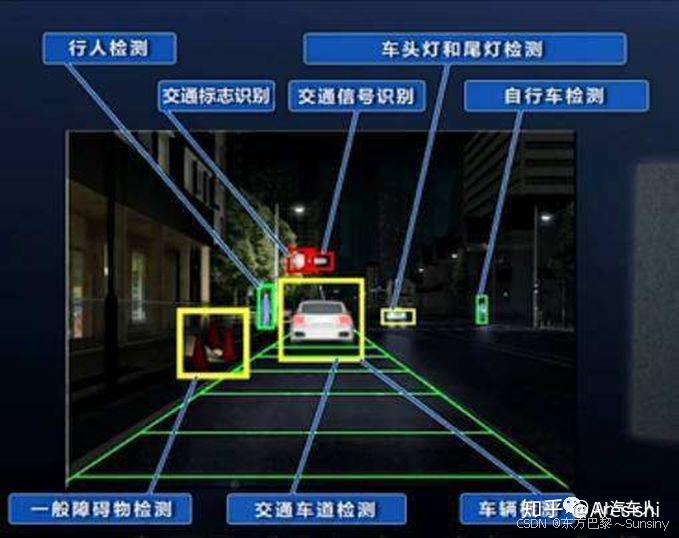
感知技术:
感知模块的目标是创建环境状态的中间级别表示,例如所有障碍物和代理的鸟瞰图,稍后将由最终产生驾驶策略的决策系统使用。这包括车道位置、可行驶区域、代理(例如汽车和行人)的位置、交通信号灯的状态等。 -
立体匹配技术:
3D地图重建是自动驾驶领域最重要的技术之一。主流成功的无人驾驶车辆一般采用多线雷达作为3-D传感器来实现这项技术。但是雷达设备价格高昂,且仅能识别深度信息,无法获取纹理和色彩,对周围感知不足。针对这些问题,视觉领域研究者一直尝试使用摄像头来取代雷达,进行3-D重建。 -
多传感器融合技术:
深度学习的实现对传感器技术提出更高的要求,需要采用多传感器融合技术。在无人驾驶车辆软件与硬件架构设计中,传感器作为数据信息的来源,重要性不言而喻。目前主流的无人驾驶车辆硬件架构中,主要采用激光雷达和摄像头作为视觉传感器。 -
控制技术:
基于卷积神经网络实现无人驾驶车辆端到端的横向与纵向控制技术。深度学习技术在自动驾驶领域的感知层、决策层与控制层的广泛运用,不断地提高感知、检测、决策与控制的准确率。
这些算法和技术的发展,正在推动自动驾驶技术的进步,使其更加精准、鲁棒,并为自动驾驶的商业化提供了可能性。
🚦 自动驾驶车辆如何理解和响应交通信号灯?
自动驾驶车辆理解和响应交通信号灯主要依赖于以下几种前沿算法和技术:
-
多传感器融合技术:
自动驾驶车辆通常采用摄像头、激光雷达(LiDAR)、雷达等多种传感器来获取周围环境的信息。这些传感器捕捉到的图像和数据通过车辆内部的智能系统进行分析和处理,以识别交通信号灯的状态。 -
深度学习与卷积神经网络(CNN):
深度学习在交通信号识别中发挥着关键作用。卷积神经网络等深度学习结构能够学习交通信号灯的特征,包括颜色、形状、亮度等,并实现对这些特征的高效提取。通过大量标记的数据集的训练,模型能够不断优化识别准确率,提高在各种复杂场景下的鲁棒性。 -
YOLO(You Only Look Once)算法:
YOLO算法是一个流行的实时目标检测系统,它能够快速准确地识别图像中的交通信号灯。YOLOv8作为该系列的最新版本,通过优化网络结构和引入创新的损失函数,显著提高了对小目标和在复杂背景下目标的检测能力。YOLOv8在实验中表现出优异的性能,在保证精度的同时提高了检测速度,解决了目标部分遮挡和小尺寸目标检测的问题,提高了识别的准确性和效率。 -
V2X(Vehicle-to-Everything)技术:
V2X技术允许自动驾驶车辆与交通信号灯系统进行通信,实现感知驾驶员视线外的行人及车辆并自动减速、为紧急车辆自动变道让行,动态V2I交通信号灯等功能。这种技术可以弥补车载传感器感知其他道路使用者的局限性,提高安全性。 -
计算机视觉技术:
自动驾驶车辆通过使用计算机视觉技术,对交通信号灯进行实时识别和分析。图像处理算法被应用于捕获到的图像,进行边缘检测、颜色分割等处理,然后利用特征提取和机器学习技术对处理后的图像进行分类,判断出交通信号灯的类型和当前状态。 -
交通信号灯的智能感知与识别:
自动驾驶系统中采用了深度学习技术,如卷积神经网络,来学习交通信号灯的特征,并实现对这些特征的高效提取。这些技术能够准确识别交通信号灯的状态(红、绿、黄),对于自动驾驶车辆的决策和行为规划具有直接影响。
这些技术和算法的综合应用,使得自动驾驶车辆能够准确地理解和响应交通信号灯,从而提高行车安全性和交通流效率。
🛣️ 自动驾驶车辆在没有交通信号灯的路段,如何做出安全决策?

自动驾驶车辆在没有交通信号灯的路段做出安全决策,主要依赖以下几种前沿技术和算法:
-
感知融合技术:
自动驾驶车辆通过融合多种传感器数据,如摄像头、激光雷达(LiDAR)、雷达等,来感知周围环境,包括其他车辆、行人、障碍物以及交通标志和标线。这些传感器数据帮助车辆理解周围环境并做出相应的安全决策。 -
行为规划(Behavioral Planning):
在理解环境的基础上,自动驾驶车辆需要进行行为规划,决定其行驶意图和通行权。例如,在交叉口右转弯时,车辆需要判断自己是否在正确的车道上,信号灯或标志是否允许右转,以及行驶路径上是否有行人或非机动车等。 -
多智能体强化学习(MAPPO):
针对无信号灯交叉口的问题,提出了基于多智能体强化学习(MAPPO)算法的自动驾驶决策方案。这种方案通过仿真环境搭建和设计奖励函数,考虑交通规则、安全性以及车流效率,实现安全高效的自动驾驶决策。 -
占用栅格图搜索算法:
在路径规划中,占用栅格图搜索算法通过将周围环境分解成网格,并判断每个网格是否被占据,来规划无碰撞路径。A算法和其改进版本如IDA、D*Algorithm等,被用于快速路径搜索。 -
拓扑连通图搜索算法:
与占用栅格图不同,拓扑连通图通过生成不规则区域来分解空间,考虑自由空间区域和障碍物形状,以优化路径规划。 -
基于规则的决策模型:
一些自动驾驶厂商提出了基于规则的决策模型,这些模型包括保持安全车距、避免鲁莽变道、在获得通行权的情况下行驶等安全原则。 -
混合整数线性规划(MILP):
在自动驾驶交叉口管控模型中,使用MILP优化车辆的最佳行驶路径和驶入时刻,以最小化交叉口总延误,提高交叉口空间的利用效率。
通过这些技术和算法的综合应用,自动驾驶车辆能够在没有交通信号灯的路段做出安全、高效的决策。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











