






需要在给定设备、条件有限、不配备新线缆、模块的情况下实现运动控制
本篇采用的是最简单的脉冲、方向控制,硬件上俩信号一接完事,通讯是OPC,之后考虑换TCP试
一、驱动器到电机
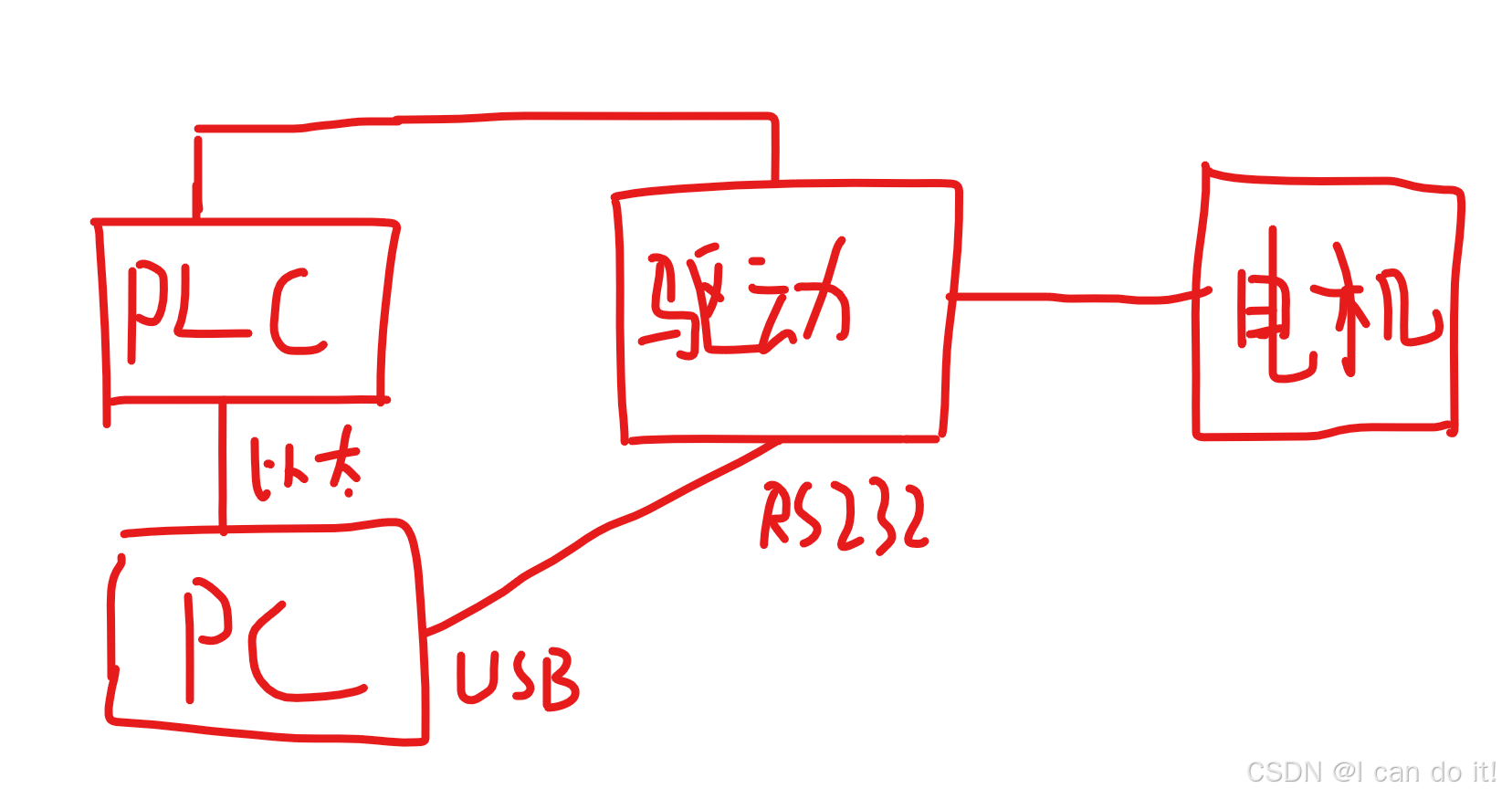
硬件连接示意图

高创的一套驱动和电机
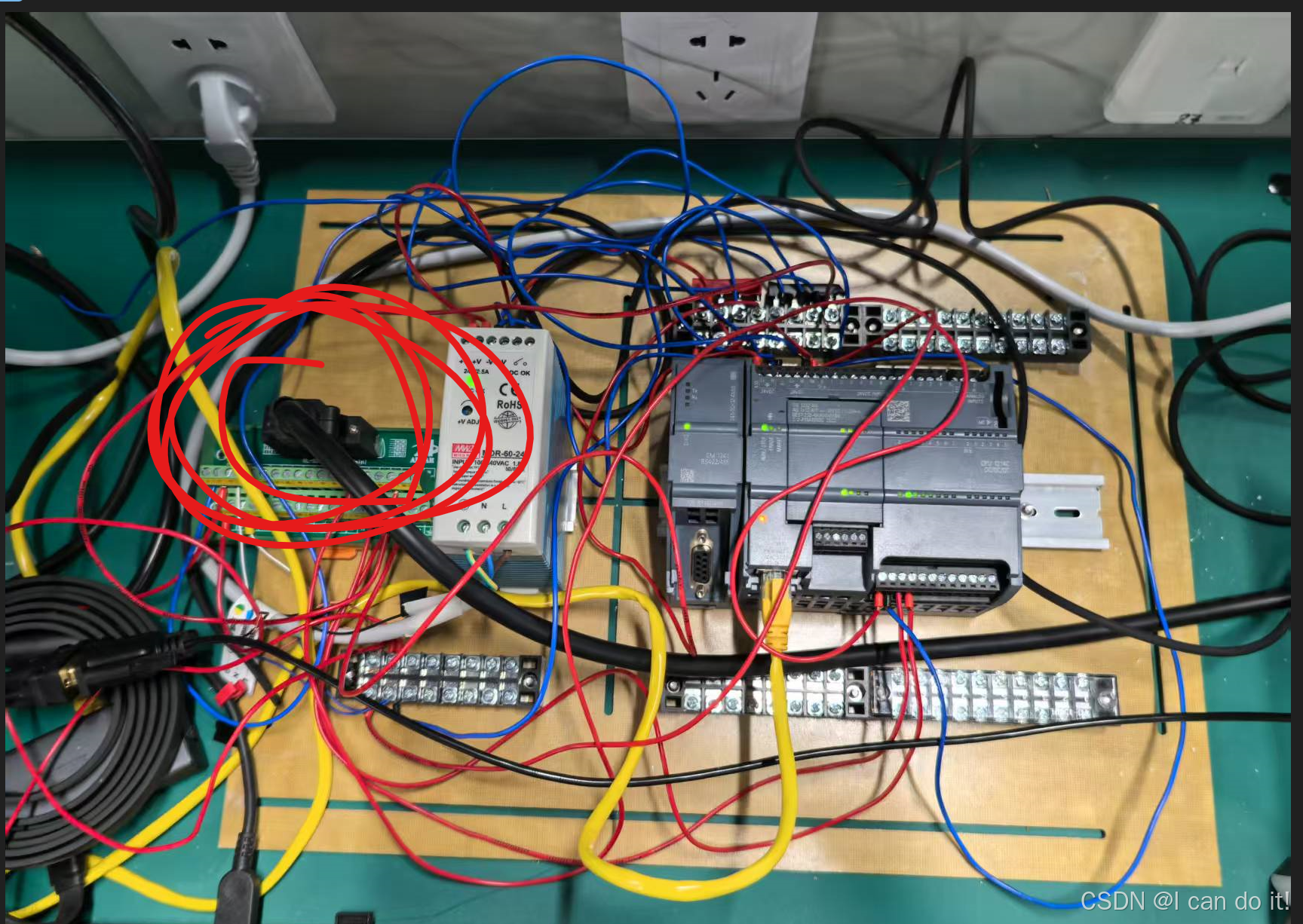
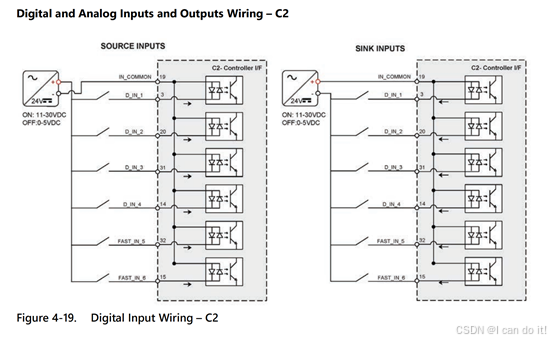
西门子的1214C CPU,配了个板子跟驱动器通讯,图中画圈的地方就是PLC和驱动器的通讯接口……其实主要就是从PLC的Q0.0和Q0.1输出脉冲信号和方向信号到驱动器,另外就是驱动器的启动信号输入到PLC的I0.0,还少一个从PLC输出的启动信号,因为实测中将输入到驱动器的信号该为漏型接法才能正常运转,驱动器这端快速输入点不够了。
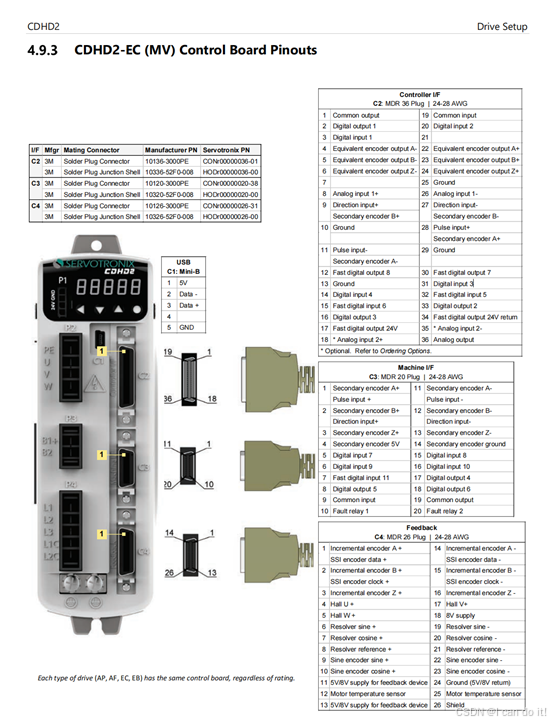
过程中需要对照驱动器接口说明和接线说明,一开始没有查阅直接接线了,后面拿着万用表挨个接口测,本应是24V的地方莫名其妙测出11V的样子真的很狼狈
本篇里用的是fast digital input/output,9和27端子需要差分输入,但是最开始用差分输入也不行,后面发现可能是源漏的问题,后面考虑再尝试
接PLC部分线之前先调通伺服控制器到电机部分
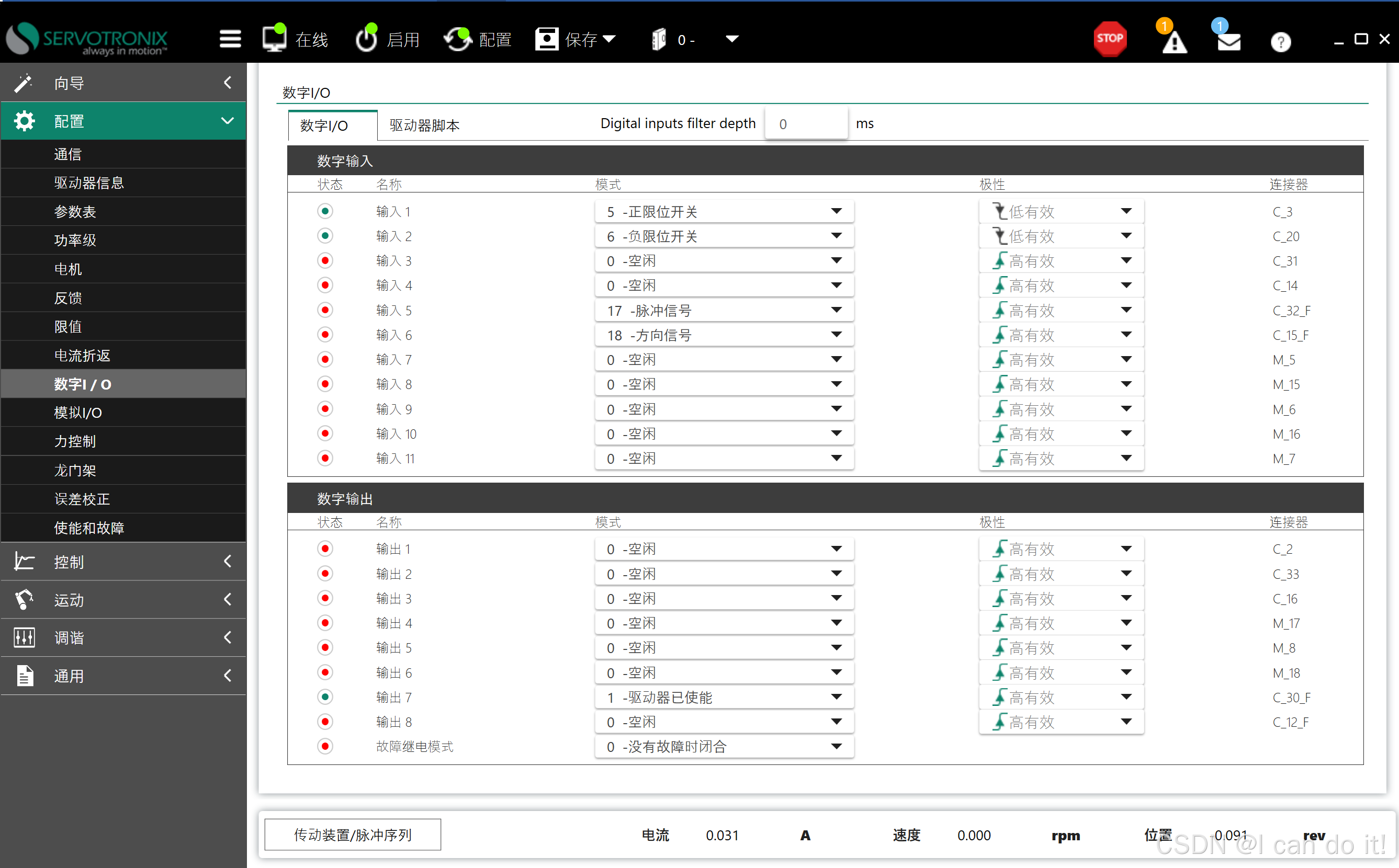
二、PLC到驱动器
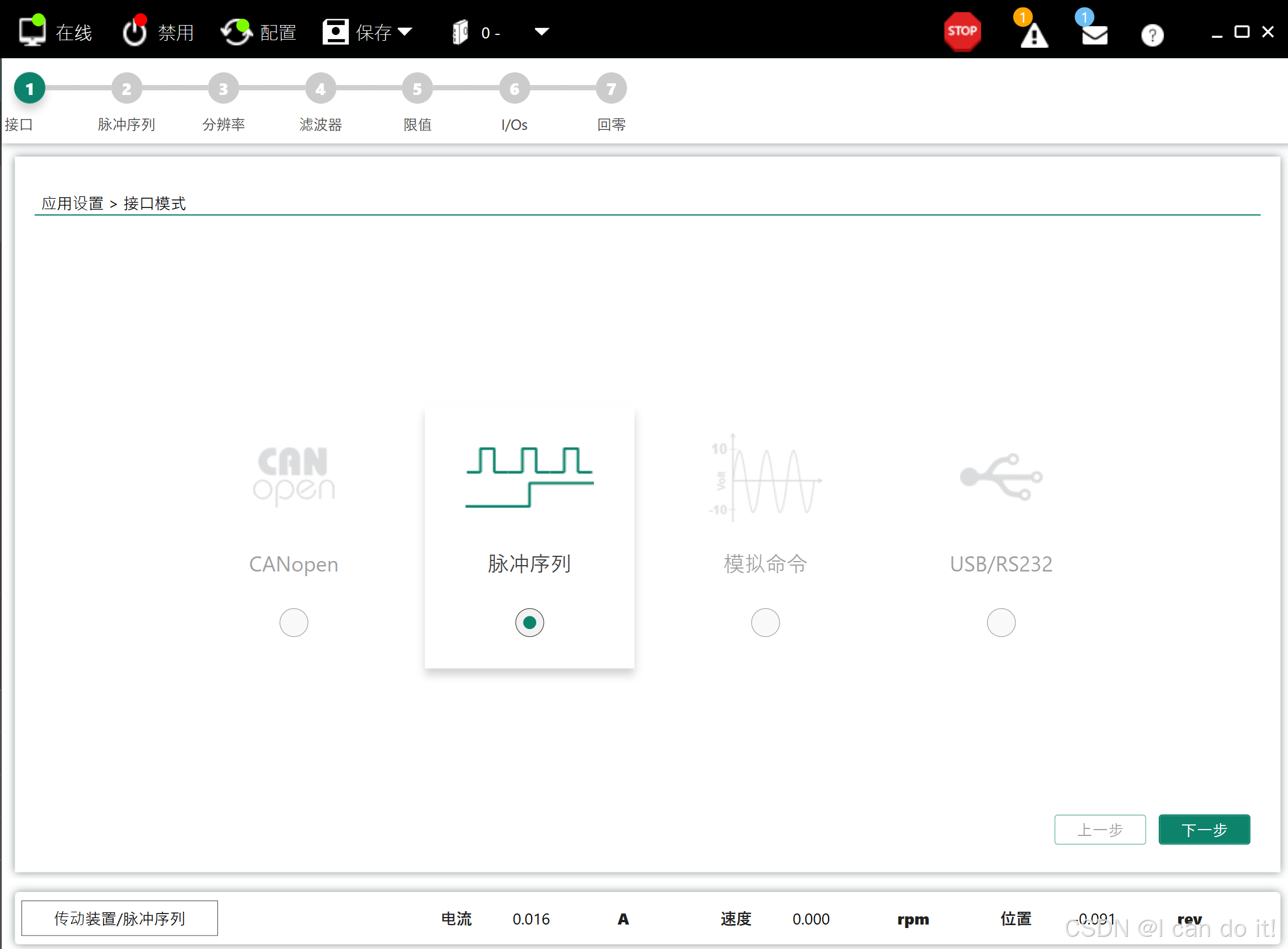
驱动器调试电机时用RS 232,相关参数调试合适后选脉冲序列,连PLC端相关接线,本篇采用的方法难度不大,就是两个DQ输出,然后一些供电合适了就行
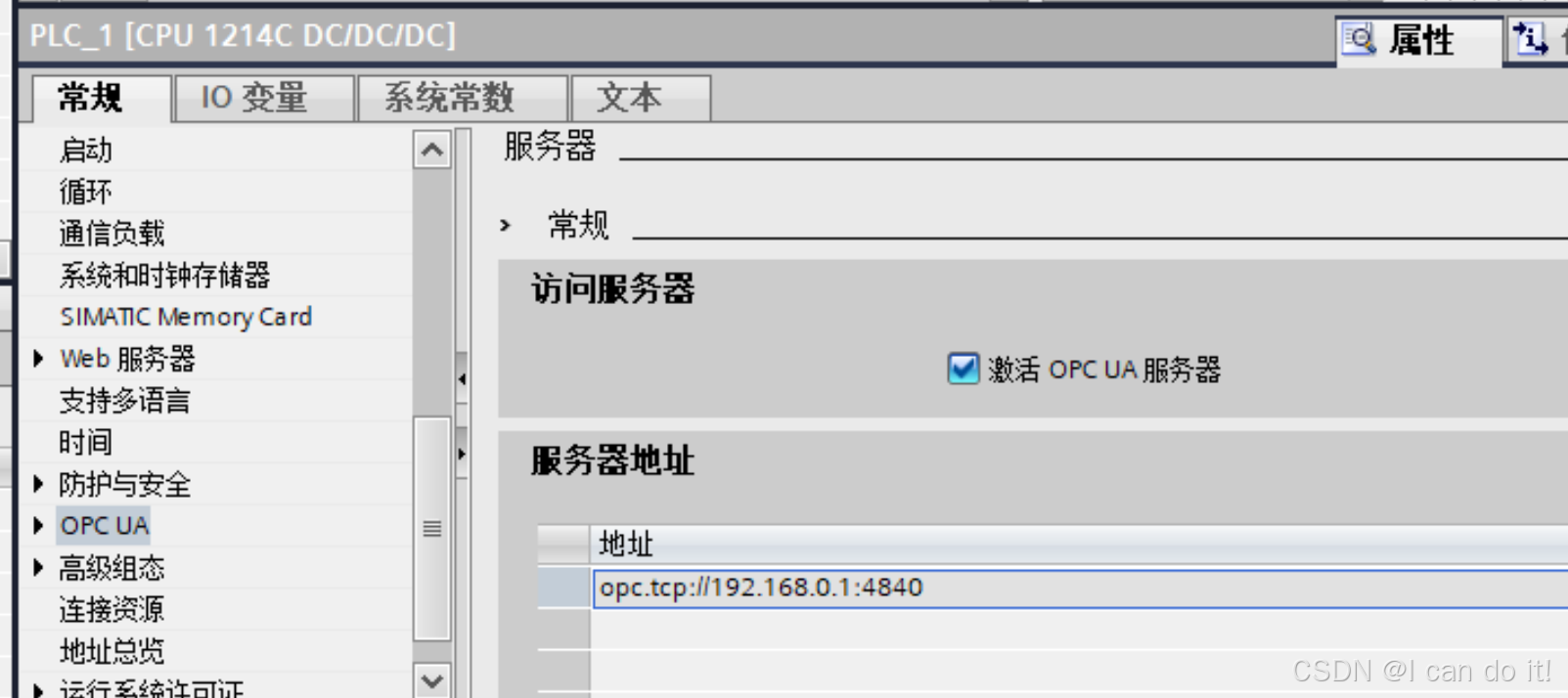
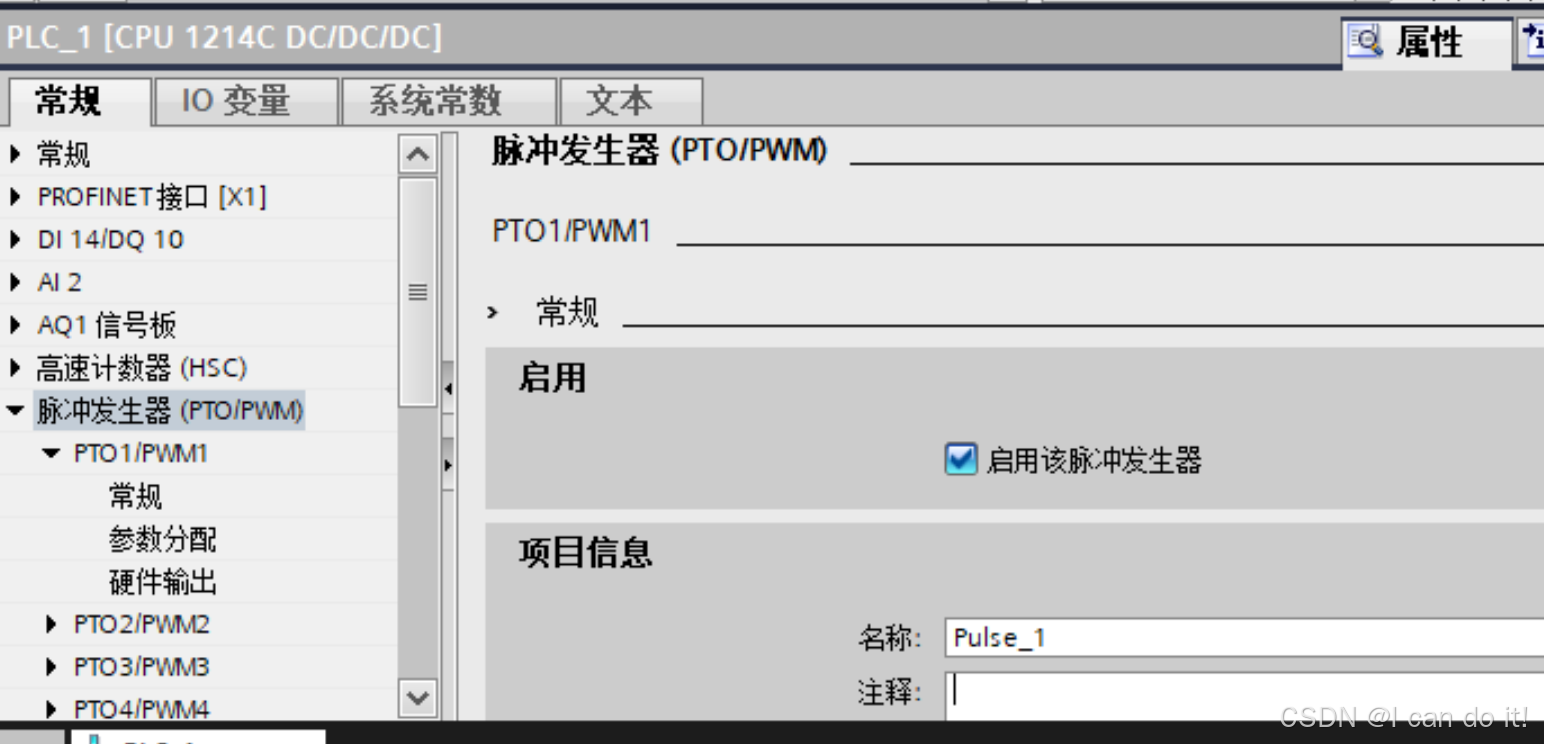
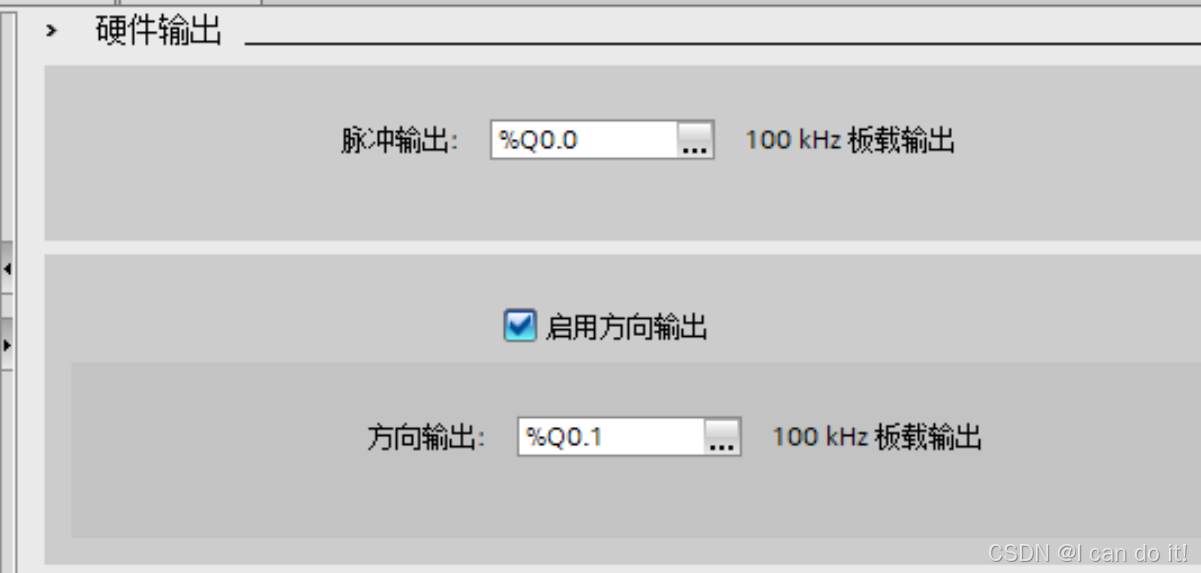
PLC端有些东西要设置,点点开就行,因为用的不是西门子的V90,也没什么连线,直接脉冲输出信号,所以拓扑和网络也不用连什么,IP设置好了就行。
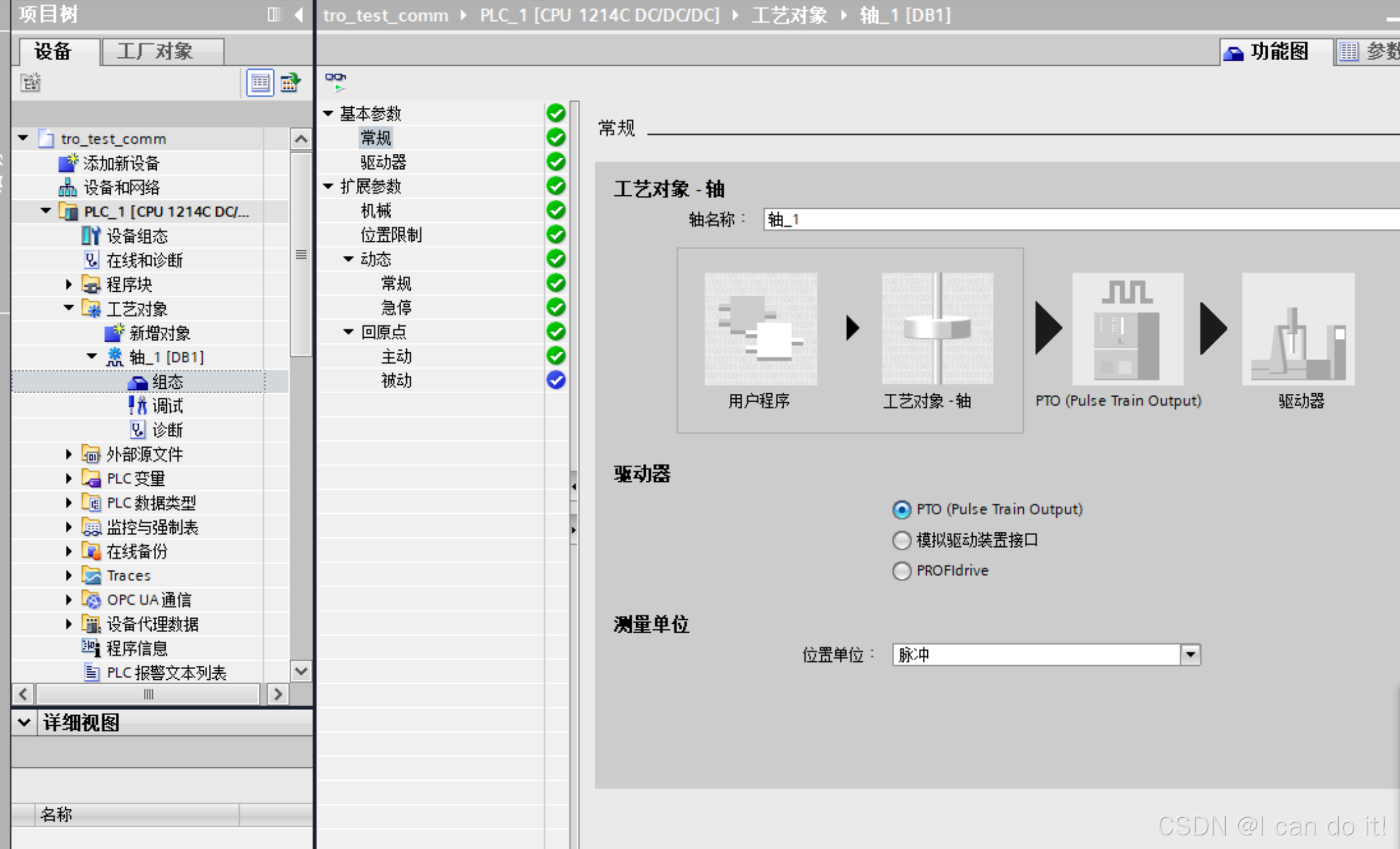
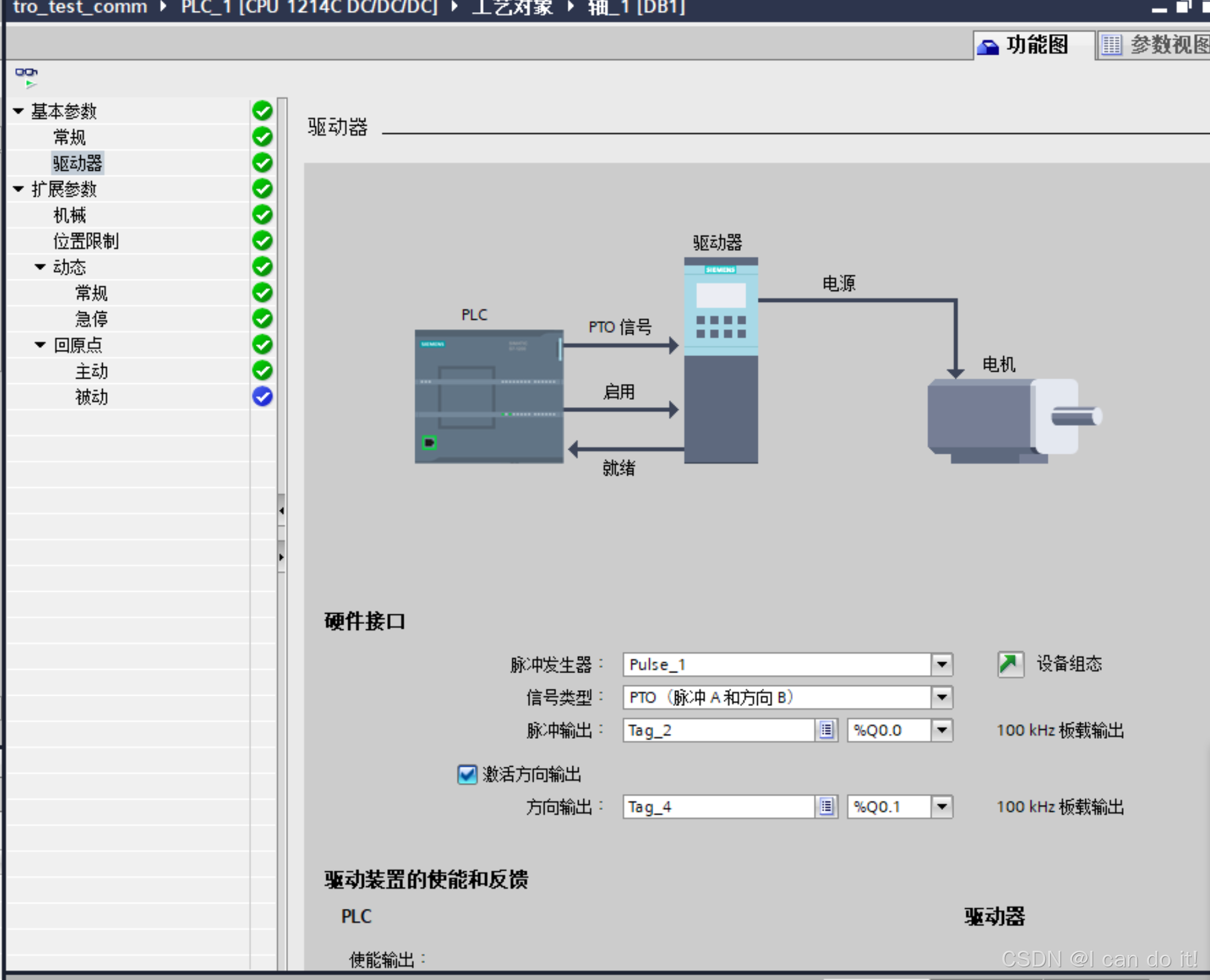
工艺对象简单设置一下,有些内容要跟驱动控制器里面对应,比如每转脉冲数,能找到对应的都对应上
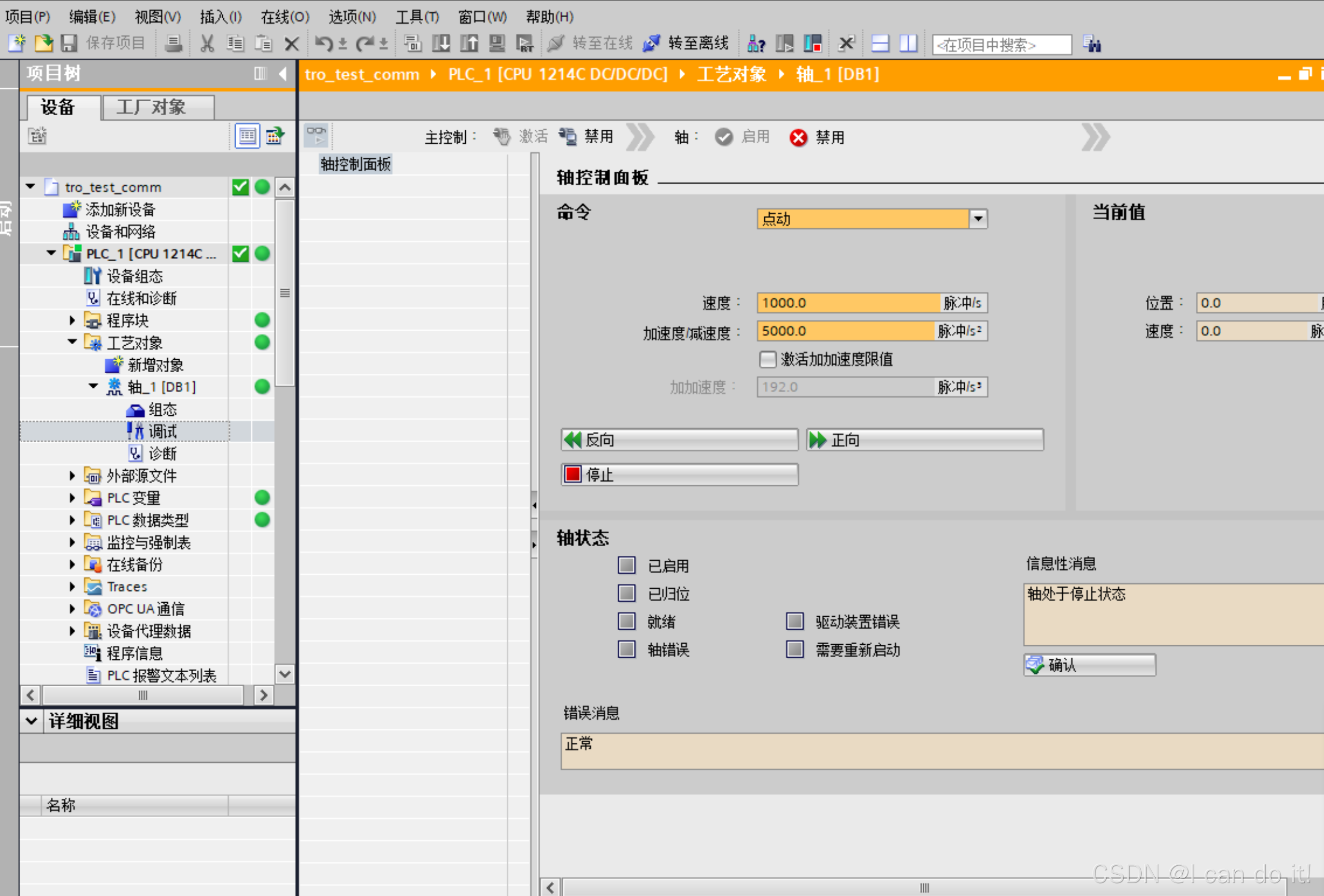
此时不需要写程序,先在轴的调试界面调试,能调通就证明连接信号啥的都没啥问题了
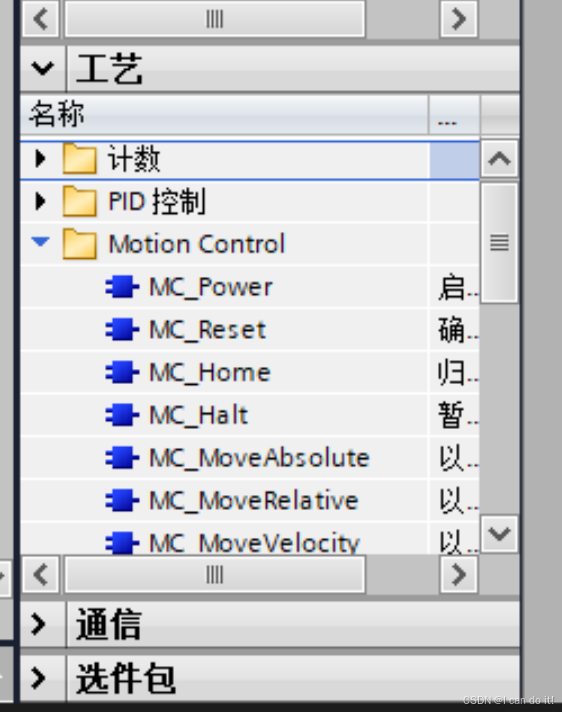
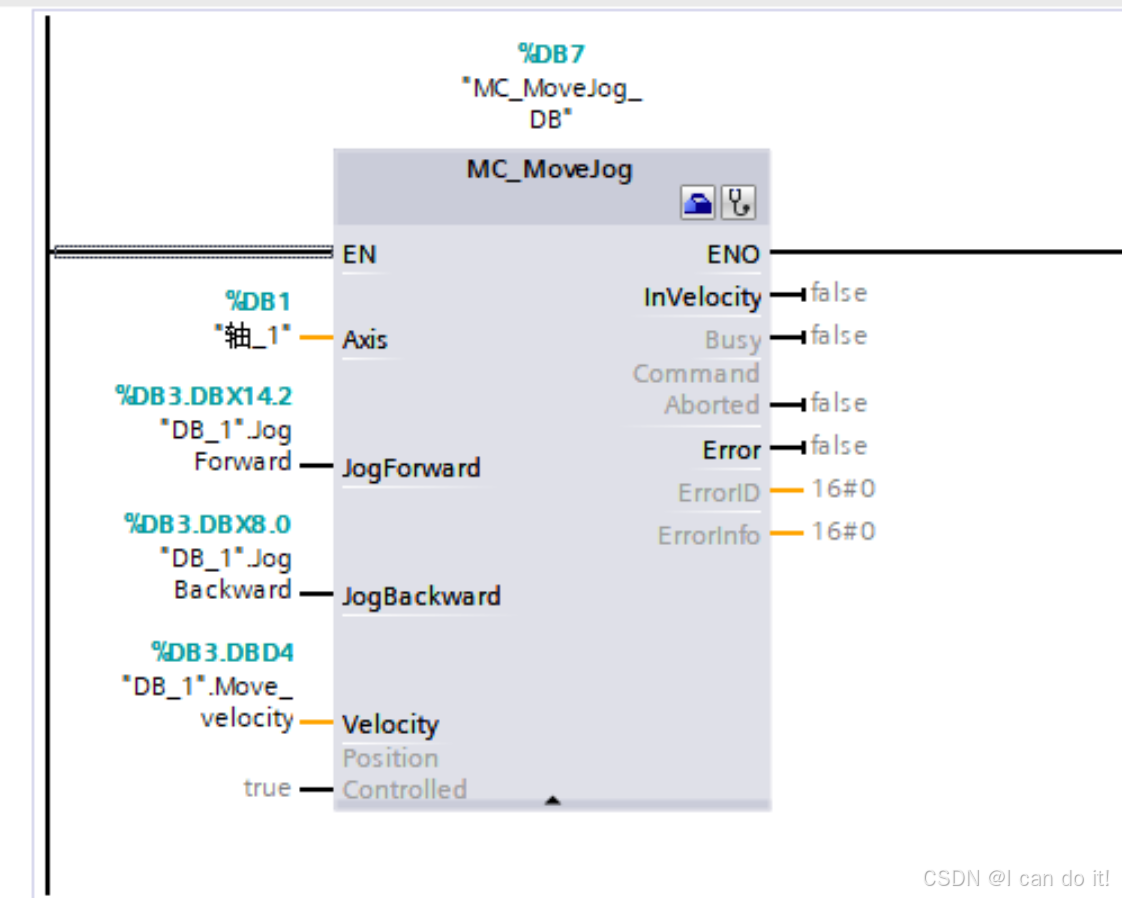
然后就可以写主程序了,我这里就是个练手任务,不需要实现什么功能,就简单写了个能让电机动起来的,调用右下角的motion control模块就完事了,就用了power,reset,home,halt和jog,后面有需要的话再试试其他运动模式,按理说没问题因为在轴控制界面没问题
三、labview端
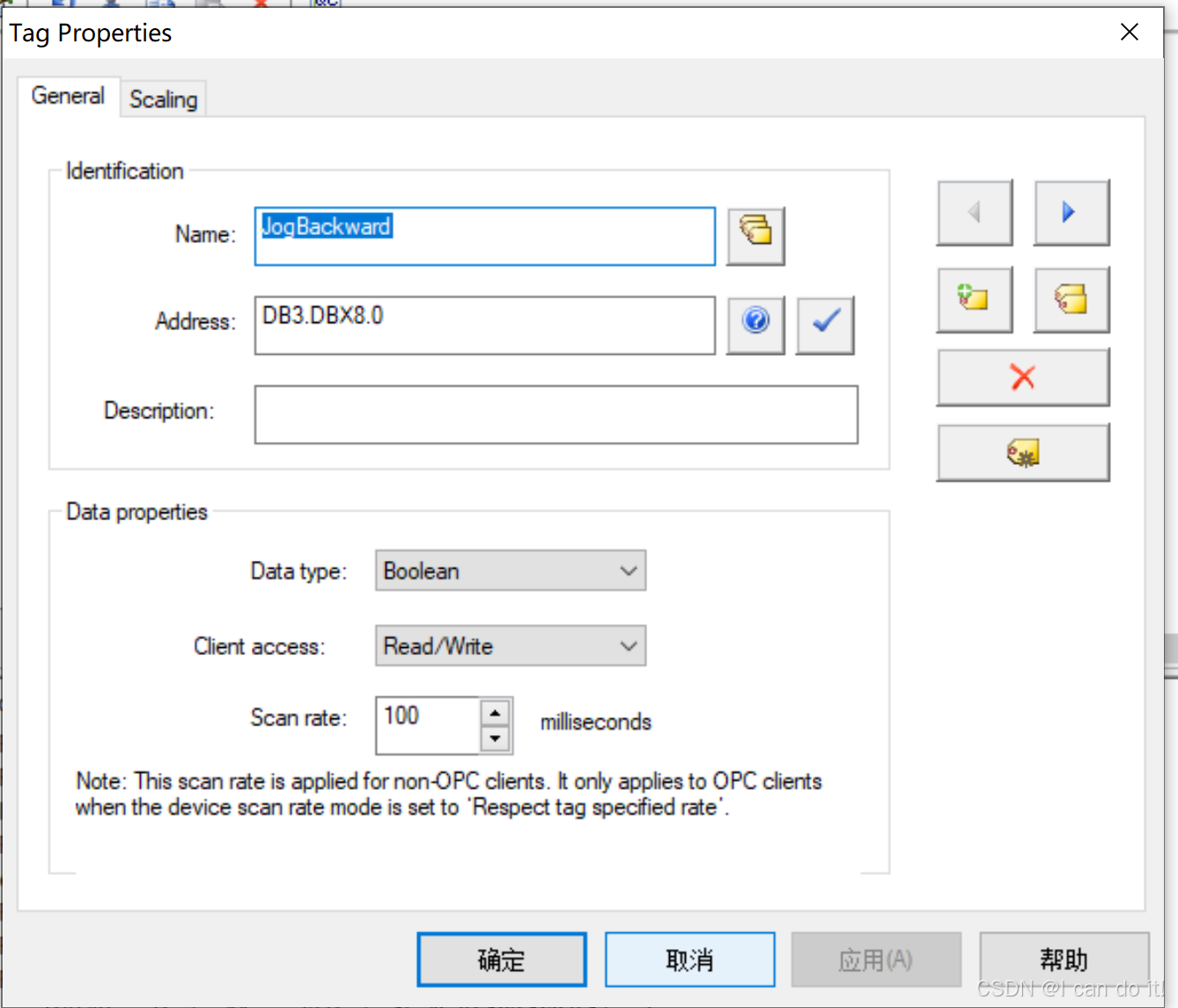
为了方便控制,把需要外部交互的信号用DB块里的
labview要先下好OPC server和dsc module,准备好之后才能OPC通讯

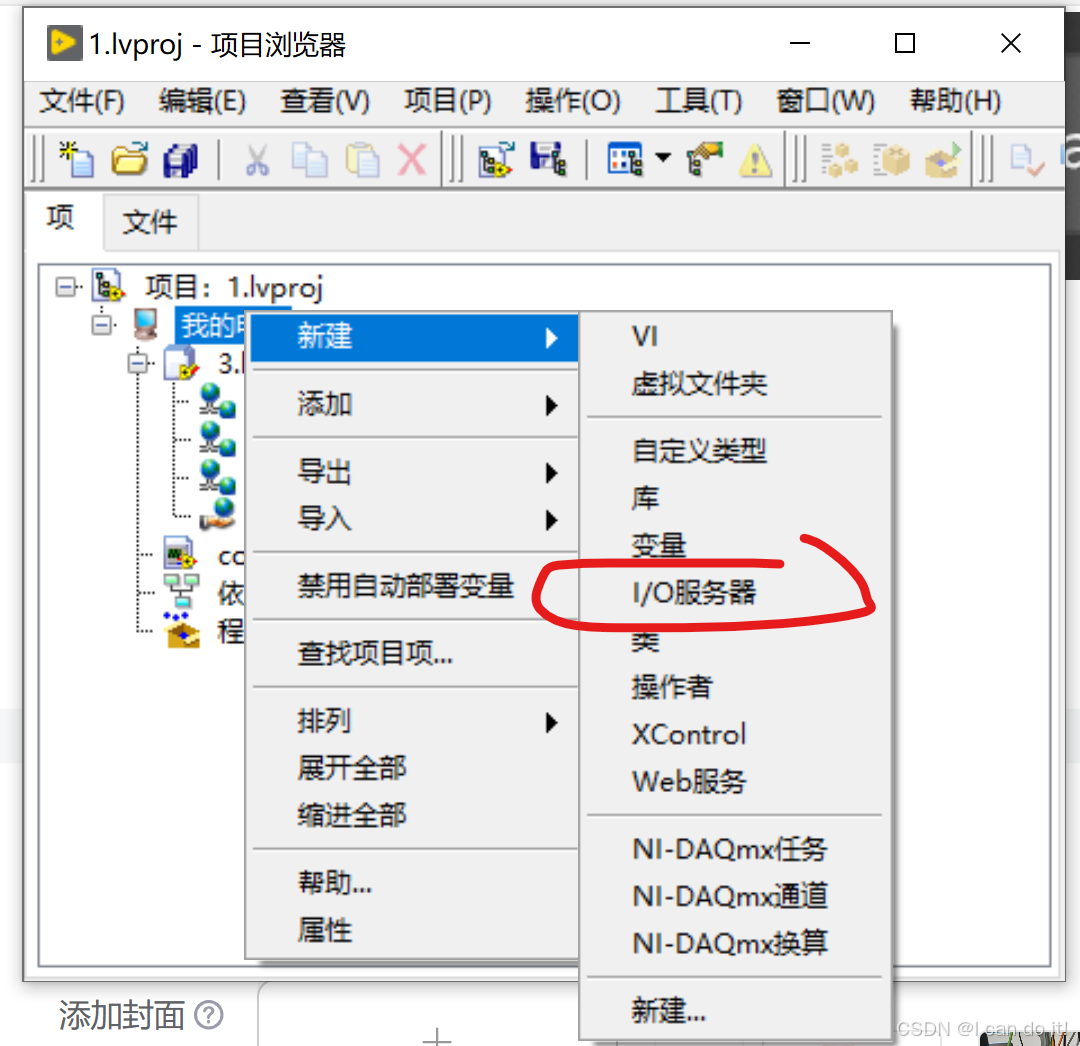
接下来的步骤参考Labview通过OPC与S1200通信_labview opc通讯-CSDN博客这篇文章写得很好按步骤来就行
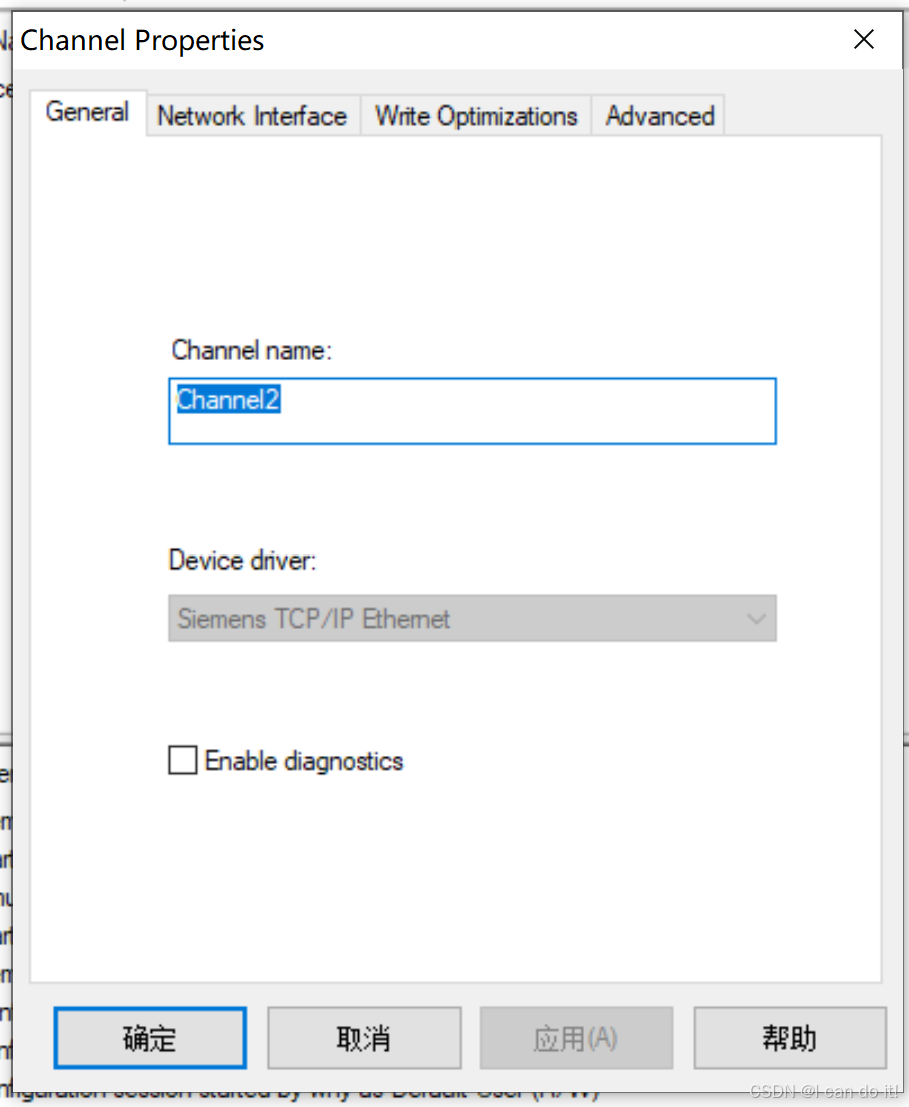
有几个值得注意的点:
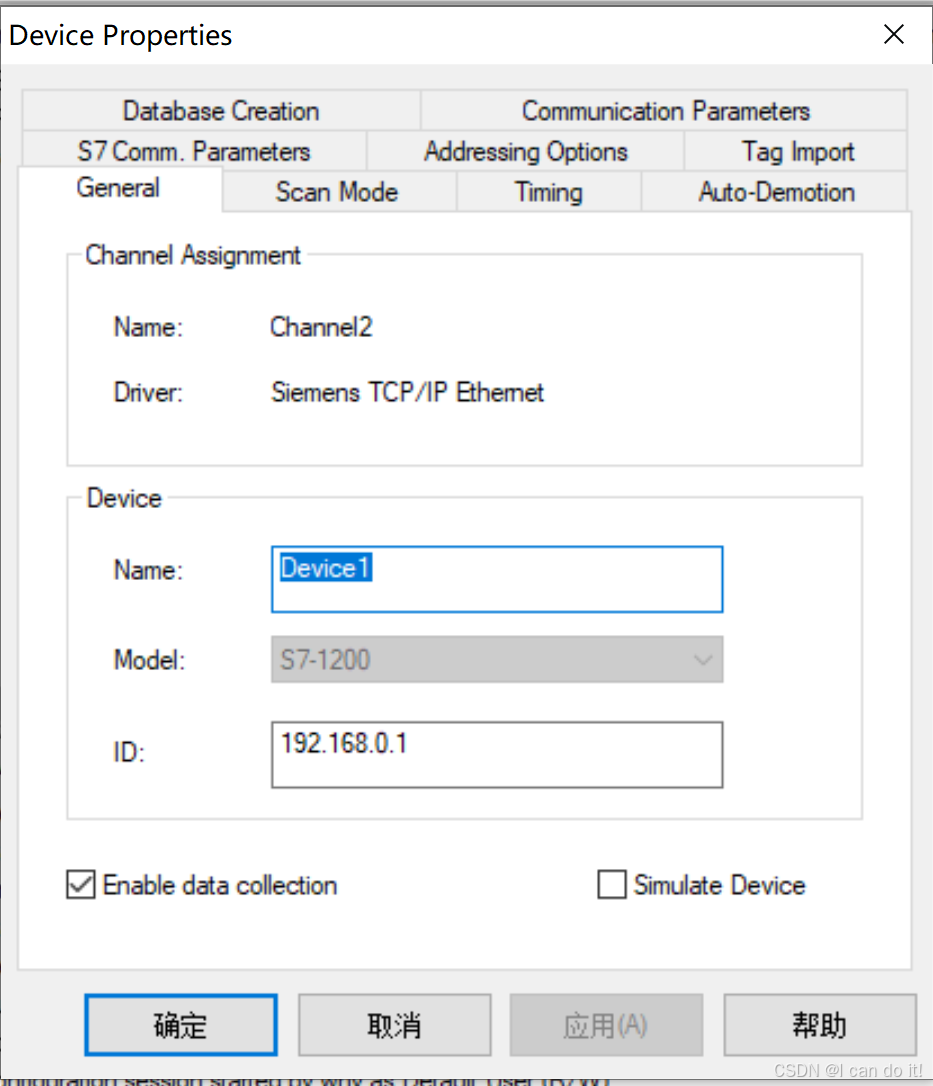
1.ID是IP地址
2.scan rate要跟程序里对应
3.可以通过quick client查看是否有数值,确认OPC是否和PLC端信号绑定上了

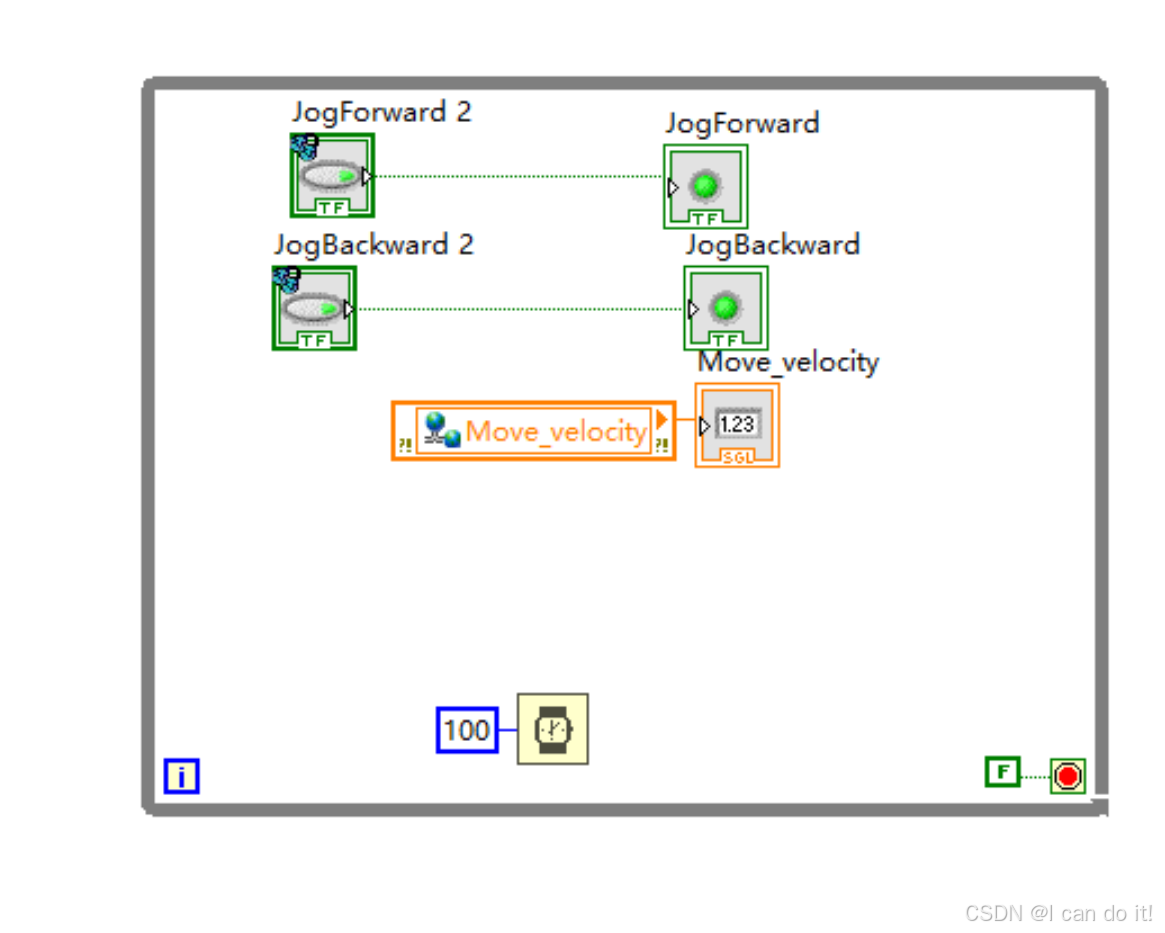
四、labview程序
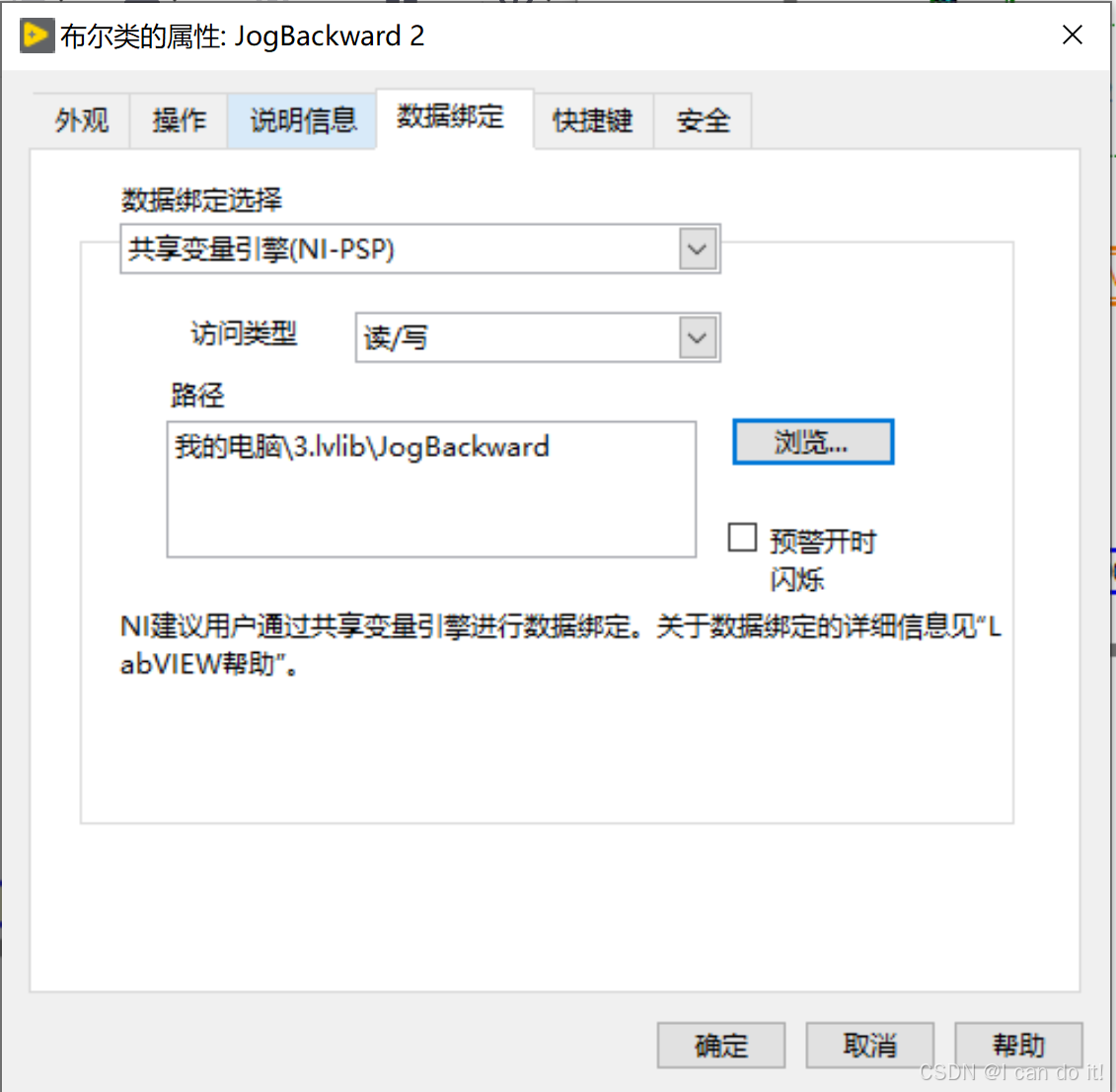
注意要完成好数据的绑定和是否可读写的设置,这两个搞定了应该没问题,然后就可以通过labview控制电机运动了

















 1093
1093

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









