







 本文介绍了一种使用递归回溯算法生成迷宫的方法。通过深度优先搜索,算法随机选择迷宫单元并标记为已访问,直到所有单元都被访问。文章详细解释了算法流程,包括如何维护已访问单元的堆栈,以及如何在地图上表示迷宫。
本文介绍了一种使用递归回溯算法生成迷宫的方法。通过深度优先搜索,算法随机选择迷宫单元并标记为已访问,直到所有单元都被访问。文章详细解释了算法流程,包括如何维护已访问单元的堆栈,以及如何在地图上表示迷宫。
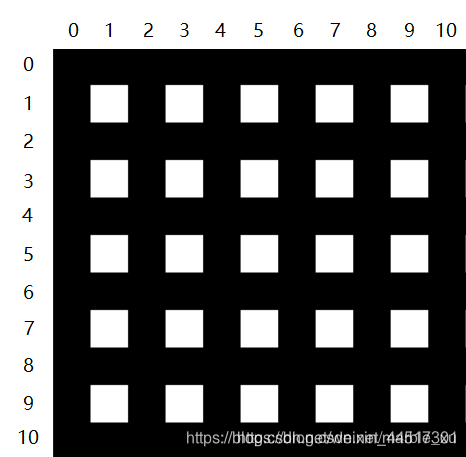
下图是算法使用的地图,地图最外围默认是一圈墙,其中白色单元是迷宫单元,黑色单元是墙,相邻白色单元之前的墙是可以被去掉的。可以看到这个地图中所有的迷宫单元在地图中的位置(X,Y),比如(1,1),(5,9)都是奇数,可以表示成(2 * x+1, 2 * y+1), x和y的取值范围从0到4。在迷宫生成算法中会用到这个表示方式。同时迷宫的长度和宽度必须为奇数。
递归回溯是一个深度优先算法,如果当前单元有相邻的未访问过的迷宫单元,就一直向前搜索,直到当前单元没有未访问过的迷宫单元,才返回查找之前搜索路径上未访问的迷宫单元,所以用堆栈来维护已访问过的迷宫单位。
算法主循环,重复下面步骤2直到堆栈为空:
1 随机选择一个迷宫单元作为起点,加入堆栈并标记为已访问
2 当堆栈非空时,从栈顶获取一个迷宫单元(不用出栈),进行循环
如果当前迷宫单元有未被访问过的相邻迷宫单元
随机选择一个未访问的相邻迷宫单元
去掉当前迷宫单元与相邻迷宫单元之间的墙
标记相邻迷宫单元为已访问,并将它加入堆栈
否则,当前迷宫单元没有未访问的相邻迷宫单元
则栈顶的迷宫单元出栈
完整代码
使用python3.7编译
from random import randint, choice
from enum import Enum
class MAP_ENTRY_TYPE(Enum):
MAP_EMPTY = 0,
MAP_BLOCK = 1,
class WALL_DIRECTION(Enum):
WALL_LEFT = 0,
WALL_UP = 1,
WALL_RIGHT = 2,
WALL_DOWN = 3,
class Map():
def __init__(self, width, height):
self.width = width
self.height = height
self.map = [[0 for x in range(self.width)] for y in range(self.height)]
def resetMap(self, value):
for y in range(self.height):
for x in range(self.width):
self.setMap(x, y, value)
def setMap(self, x, y, value):
if value == MAP_ENTRY_TYPE.MAP_EMPTY:
self.map[y][x] = 0
elif value == MAP_ENTRY_TYPE.MAP_BLOCK:
self.map[y][x] = 1
def isVisited(self, x, y):
return self.map[y][x] != 1
def showMap(self):
for row in self.map:
s = ''
for entry in row:
if entry == 0:
s += ' 0'
elif entry == 1:
s += ' #'
else:
s += ' X'
print(s)
# find unvisited adjacent entries of four possible entris
# then add random one of them to checklist and mark it as visited
def checkAdjacentPos(map, x, y, width, height, checklist):
directions = []
if x > 0:
if not map.isVisited(2*(x-1)+1, 2*y+1):
directions.append(WALL_DIRECTION.WALL_LEFT)
if y > 0:
if not map.isVisited(2*x+1, 2*(y-1)+1):
directions.append(WALL_DIRECTION.WALL_UP)
if x < width -1:
if not map.isVisited(2*(x+1)+1, 2*y+1):
directions.append(WALL_DIRECTION.WALL_RIGHT)
if y < height -1:
if not map.isVisited(2*x+1, 2*(y+1)+1):
directions.append(WALL_DIRECTION.WALL_DOWN)
if len(directions):
direction = choice(directions)
#print("(%d, %d) => %s" % (x, y, str(direction)))
if direction == WALL_DIRECTION.WALL_LEFT:
map.setMap(2*(x-1)+1, 2*y+1, MAP_ENTRY_TYPE.MAP_EMPTY)
map.setMap(2*x, 2*y+1, MAP_ENTRY_TYPE.MAP_EMPTY)
checklist.append((x-1, y))
elif direction == WALL_DIRECTION.WALL_UP:
map.setMap(2*x+1, 2*(y-1)+1, MAP_ENTRY_TYPE.MAP_EMPTY)
map.setMap(2*x+1, 2*y, MAP_ENTRY_TYPE.MAP_EMPTY)
checklist.append((x, y-1))
elif direction == WALL_DIRECTION.WALL_RIGHT:
map.setMap(2*(x+1)+1, 2*y+1, MAP_ENTRY_TYPE.MAP_EMPTY)
map.setMap(2*x+2, 2*y+1, MAP_ENTRY_TYPE.MAP_EMPTY)
checklist.append((x+1, y))
elif direction == WALL_DIRECTION.WALL_DOWN:
map.setMap(2*x+1, 2*(y+1)+1, MAP_ENTRY_TYPE.MAP_EMPTY)
map.setMap(2*x+1, 2*y+2, MAP_ENTRY_TYPE.MAP_EMPTY)
checklist.append((x, y+1))
return True
else:
# if not find any unvisited adjacent entry
return False
# recursive backtracker algorithm
def recursiveBacktracker(map, width, height):
startX, startY = (randint(0, width-1), randint(0, height-1))
print("start(%d, %d)" % (startX, startY))
map.setMap(2*startX+1, 2*startY+1, MAP_ENTRY_TYPE.MAP_EMPTY)
checklist = []
checklist.append((startX, startY))
while len(checklist):
# use checklist as a stack, get entry from the top of stack
entry = checklist[-1]
if not checkAdjacentPos(map, entry[0], entry[1], width, height, checklist):
# the entry has no unvisited adjacent entry, so remove it from checklist
checklist.remove(entry)
def doRecursiveBacktracker(map):
# set all entries of map to wall
map.resetMap(MAP_ENTRY_TYPE.MAP_BLOCK)
recursiveBacktracker(map, (map.width-1)//2, (map.height-1)//2)
def run():
WIDTH = 31
HEIGHT = 21
map = Map(WIDTH, HEIGHT)
doRecursiveBacktracker(map)
map.showMap()
if __name__ == "__main__":
run()


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









