






0. 学前趣闻
行列式的符号为什么 ∣ A ∣ |A| ∣A∣
-
历史起源
- 行列式最早由日本数学家关孝和于1683年在研究方程组时发现
- 但用两条竖线表示行列式的记号 ∣ A ∣ |A| ∣A∣ 是由柯西(Cauchy)在1812年首次引入
-
符号选择的原因
- 直观性:竖线 ∣ | ∣ 在视觉上像一个"围栏"或"边界",暗示着它包含了一个完整的数学对象
- 区分性:需要一个符号能够清晰地与普通括号 ( ) () ()、方括号 [ ] [] [] 区分开
- 几何意义:两条竖线也可以理解为"测量"的含义,因为行列式在几何上表示面积或体积
-
其他常见表示方法
d e t ( A ) = d e t ( a b c d ) = ∣ a b c d ∣ det(A) = det\begin{pmatrix} a & b \\ c & d \end{pmatrix} = \begin{vmatrix} a & b \\ c & d \end{vmatrix} det(A)=det(acbd)= acbd -
符号的演变
- 最初期:使用 ∑ 符号表示行列式中元素的求和
- 中期:使用 D 或 Det 表示
- 现代:统一使用 ∣ A ∣ |A| ∣A∣ 或 d e t ( A ) det(A) det(A)
-
使用这个符号的优势
- 简洁明了
- 书写方便
- 容易与矩阵的其他运算区分
- 在手写时不容易出错
这个符号的选择体现了数学符号的一个重要原则:既要简单易用,又要富有意义。 ∣ A ∣ |A| ∣A∣ 这个符号完美地满足了这两个要求。
行列式中的'代表什么,比如A’
使用A’(读作"A prime")是数学中的一种常见符号约定:
- 撇号(')通常用来表示对某个对象进行了变换或修改
- 在矩阵运算中,它特别用来表示经过初等变换后的矩阵
- 这种记号简洁明了,能够清晰地表达出这是原矩阵的一个变体
矩阵A’是通过对某个原始矩阵A进行行变换得到的。具体来说:
-
第一行保持不变: [ a b ] [a \quad b] [ab]
-
第二行是通过将第一行的k倍加到原始第二行上得到的:
[ c d ] + k [ a b ] = [ c + k a d + k b ] [c \quad d] + k[a \quad b] = [c+ka \quad d+kb] [cd]+k[ab]=[c+kad+kb]
这种变换的意义在于:
- 它保持了矩阵的行列式不变
- 这是求解线性方程组时常用的一种基本行变换
- 在高斯消元法中经常使用这种变换来简化矩阵
0. 温馨提示: 文章的番外才是核心!!
1. 什么是行列式?
行列式是一个重要的数学概念,它将方阵映射到一个标量。对于一个 n×n 的方阵,其行列式是一个数字,记作 d e t ( A ) det(A) det(A) 或 ∣ A ∣ |A| ∣A∣。
简单的例子
对于2×2矩阵:
A
=
[
a
b
c
d
]
A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}
A=[acbd]
其行列式为:
∣
A
∣
=
a
d
−
b
c
|A| = ad - bc
∣A∣=ad−bc
2. 几何意义
行列式有重要的几何意义:
- 2×2矩阵的行列式表示对应平行四边形的面积
- 3×3矩阵的行列式表示对应平行六面体的体积
- 行列式的正负表示变换是否改变了坐标系的朝向
3. 行列式的性质
-
行列式为零的意义
- 矩阵行列式为0,表示矩阵是奇异的(不可逆)
- 对应的几何变换会导致降维
-
基本性质
∣ A B ∣ = ∣ A ∣ ⋅ ∣ B ∣ |AB| = |A| \cdot |B| ∣AB∣=∣A∣⋅∣B∣
∣ A T ∣ = ∣ A ∣ |A^T| = |A| ∣AT∣=∣A∣ -
行列式与矩阵运算
- 某行(列)乘以k,行列式变为原来的k倍
- 互换两行(列),行列式变号
- 某行(列)的k倍加到另一行(列),行列式不变
4. 计算方法
4.1 二阶行列式
对于2×2矩阵:
∣
a
11
a
12
a
21
a
22
∣
=
a
11
a
22
−
a
12
a
21
\begin{vmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{vmatrix} = a_{11}a_{22} - a_{12}a_{21}
a11a21a12a22
=a11a22−a12a21
4.2 三阶行列式
对于3×3矩阵:
∣
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
∣
\begin{vmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{vmatrix}
a11a21a31a12a22a32a13a23a33
可以用萨吕法则计算:
∣
A
∣
=
a
11
a
22
a
33
+
a
12
a
23
a
31
+
a
13
a
21
a
32
−
a
13
a
22
a
31
−
a
12
a
21
a
33
−
a
11
a
23
a
32
|A| = a_{11}a_{22}a_{33} + a_{12}a_{23}a_{31} + a_{13}a_{21}a_{32} - a_{13}a_{22}a_{31} - a_{12}a_{21}a_{33} - a_{11}a_{23}a_{32}
∣A∣=a11a22a33+a12a23a31+a13a21a32−a13a22a31−a12a21a33−a11a23a32
5. 应用实例
5.1 克莱姆法则解方程组
对于方程组:
{
a
11
x
+
a
12
y
=
b
1
a
21
x
+
a
22
y
=
b
2
\begin{cases} a_{11}x + a_{12}y = b_1 \\ a_{21}x + a_{22}y = b_2 \end{cases}
{a11x+a12y=b1a21x+a22y=b2
解为:
x
=
∣
A
x
∣
∣
A
∣
,
y
=
∣
A
y
∣
∣
A
∣
x = \frac{|A_x|}{|A|}, y = \frac{|A_y|}{|A|}
x=∣A∣∣Ax∣,y=∣A∣∣Ay∣
其中:
∣
A
∣
=
∣
a
11
a
12
a
21
a
22
∣
|A| = \begin{vmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{vmatrix}
∣A∣=
a11a21a12a22
博主文章导航: [[10-03-克莱姆法则解方程组]]
5.2 求逆矩阵
对于2×2矩阵,其逆矩阵可以用行列式表示:
A
−
1
=
1
∣
A
∣
[
a
22
−
a
12
−
a
21
a
11
]
A^{-1} = \frac{1}{|A|}\begin{bmatrix} a_{22} & -a_{12} \\ -a_{21} & a_{11} \end{bmatrix}
A−1=∣A∣1[a22−a21−a12a11]
[[10-04-行列式与矩阵求逆]]
6. 练习例题
例1:计算行列式
∣
2
1
3
4
∣
\begin{vmatrix} 2 & 1 \\ 3 & 4 \end{vmatrix}
2314
解:
∣
A
∣
=
(
2
×
4
)
−
(
1
×
3
)
=
8
−
3
=
5
|A| = (2 \times 4) - (1 \times 3) = 8 - 3 = 5
∣A∣=(2×4)−(1×3)=8−3=5
例2:使用行列式求解方程组
{
3
x
+
2
y
=
12
x
−
2
y
=
0
\begin{cases} 3x + 2y = 12 \\ x - 2y = 0 \end{cases}
{3x+2y=12x−2y=0
解:
∣
A
∣
=
∣
3
2
1
−
2
∣
=
−
8
|A| = \begin{vmatrix} 3 & 2 \\ 1 & -2 \end{vmatrix} = -8
∣A∣=
312−2
=−8
7. 注意事项
- 计算行列式时要注意正负号
- n阶行列式有n!项
- 行列式为0时,对应矩阵不可逆
- 计算高阶行列式时,可以使用降阶方法
行列式是线性代数中的基础概念,掌握它对于理解矩阵运算、线性变换和解线性方程组都非常重要。
番外
番外零: 为什么是 ∣ A ∣ = a d − b c |A| = ad - bc ∣A∣=ad−bc
-
几何意义解释
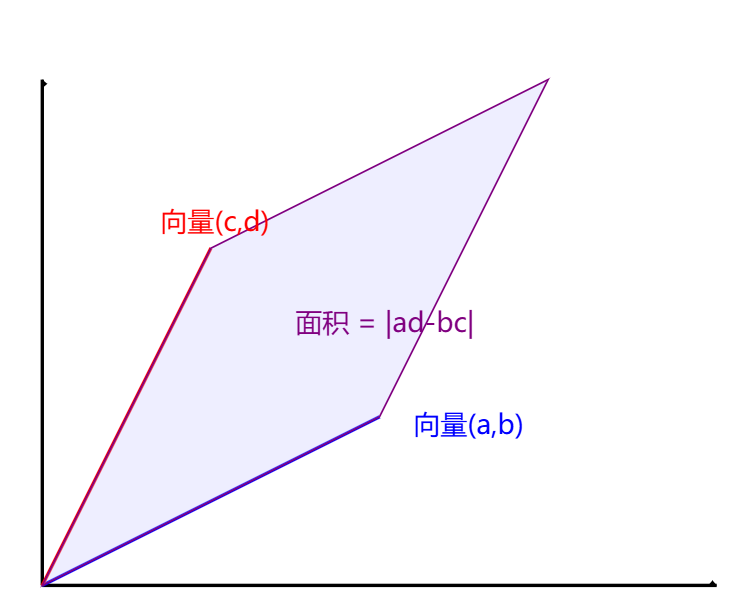
行列式 ∣ A ∣ |A| ∣A∣ 代表由矩阵的两个行向量所构成的平行四边形的有向面积:
- 第一个向量是 ( a , b ) (a,b) (a,b)
- 第二个向量是 ( c , d ) (c,d) (c,d)
- 平行四边形的面积可以通过叉积计算: a d − b c ad-bc ad−bc
-
代数推导
对于2×2矩阵,行列式可以通过对角线法则得到:
∣ a b c d ∣ \begin{vmatrix} a & b \\ c & d \end{vmatrix} acbd - 主对角线乘积: a × d = a d a \times d = ad a×d=ad(正号)
- 副对角线乘积: b × c = b c b \times c = bc b×c=bc(负号)
- 相减得到: a d − b c ad-bc ad−bc
-
排列理论解释
行列式的定义来自于排列:- 对于2×2矩阵,只有两种排列: ( 1 , 2 ) (1,2) (1,2) 和 ( 2 , 1 ) (2,1) (2,1)
- ( 1 , 2 ) (1,2) (1,2) 是偶排列,对应 a d ad ad(正号)
- ( 2 , 1 ) (2,1) (2,1) 是奇排列,对应 b c bc bc(负号)
- 所以最终结果是 a d − b c ad-bc ad−bc
-
为什么不是其他形式
- a d + b c ad+bc ad+bc 不能保持行列式的性质(如行交换改变符号)
- a c − d b ac-db ac−db 不能保持面积的几何意义
- 只有
a
d
−
b
c
ad-bc
ad−bc 同时满足:
- 几何性质(面积)
- 代数性质(行交换改变符号)
- 线性性质(分配率)
这就是为什么2×2矩阵的行列式必须是 a d − b c ad-bc ad−bc 的形式,因为只有这种形式才能同时满足行列式的所有必要性质。
番外一: ∣ A B ∣ = ∣ A ∣ ⋅ ∣ B ∣ |AB| = |A| \cdot |B| ∣AB∣=∣A∣⋅∣B∣ 为啥成立?
- 首先,对于2×2矩阵的情况
设:
A
=
[
a
11
a
12
a
21
a
22
]
,
B
=
[
b
11
b
12
b
21
b
22
]
A = \begin{bmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{bmatrix}, B = \begin{bmatrix} b_{11} & b_{12} \\ b_{21} & b_{22} \end{bmatrix}
A=[a11a21a12a22],B=[b11b21b12b22]
计算
A
B
AB
AB:
A
B
=
[
(
a
11
b
11
+
a
12
b
21
)
(
a
11
b
12
+
a
12
b
22
)
(
a
21
b
11
+
a
22
b
21
)
(
a
21
b
12
+
a
22
b
22
)
]
AB = \begin{bmatrix} (a_{11}b_{11} + a_{12}b_{21}) & (a_{11}b_{12} + a_{12}b_{22}) \\ (a_{21}b_{11} + a_{22}b_{21}) & (a_{21}b_{12} + a_{22}b_{22}) \end{bmatrix}
AB=[(a11b11+a12b21)(a21b11+a22b21)(a11b12+a12b22)(a21b12+a22b22)]
那么:
∣
A
B
∣
=
(
a
11
b
11
+
a
12
b
21
)
(
a
21
b
12
+
a
22
b
22
)
−
(
a
11
b
12
+
a
12
b
22
)
(
a
21
b
11
+
a
22
b
21
)
|AB| = (a_{11}b_{11} + a_{12}b_{21})(a_{21}b_{12} + a_{22}b_{22}) - (a_{11}b_{12} + a_{12}b_{22})(a_{21}b_{11} + a_{22}b_{21})
∣AB∣=(a11b11+a12b21)(a21b12+a22b22)−(a11b12+a12b22)(a21b11+a22b21)
展开后:
∣
A
B
∣
=
(
a
11
a
22
−
a
12
a
21
)
(
b
11
b
22
−
b
12
b
21
)
=
∣
A
∣
⋅
∣
B
∣
|AB| = (a_{11}a_{22} - a_{12}a_{21})(b_{11}b_{22} - b_{12}b_{21}) = |A| \cdot |B|
∣AB∣=(a11a22−a12a21)(b11b22−b12b21)=∣A∣⋅∣B∣
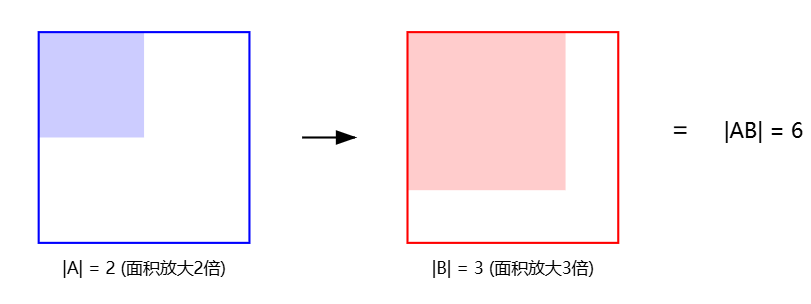
- 几何解释
让我通过可视化来解释这个性质:
-
这个性质的意义
这个性质告诉我们:
- 如果矩阵A将面积放大了 ∣ A ∣ |A| ∣A∣倍
- 矩阵B将面积放大了 ∣ B ∣ |B| ∣B∣倍
- 那么它们的组合变换将面积放大了 ∣ A ∣ ⋅ ∣ B ∣ |A| \cdot |B| ∣A∣⋅∣B∣倍
-
重要应用
这个性质有很多重要应用:
a) 求逆矩阵时:
∣
A
−
1
∣
=
1
∣
A
∣
|A^{-1}| = \frac{1}{|A|}
∣A−1∣=∣A∣1
因为
∣
A
A
−
1
∣
=
∣
A
∣
∣
A
−
1
∣
=
1
|AA^{-1}| = |A||A^{-1}| = 1
∣AA−1∣=∣A∣∣A−1∣=1
b) 检验矩阵乘法计算:
- 如果计算 A B AB AB 时
- 可以分别计算 ∣ A ∣ |A| ∣A∣、 ∣ B ∣ |B| ∣B∣ 和 ∣ A B ∣ |AB| ∣AB∣
- 验证是否满足 ∣ A B ∣ = ∣ A ∣ ⋅ ∣ B ∣ |AB| = |A| \cdot |B| ∣AB∣=∣A∣⋅∣B∣
c) 判断可逆性:
- 如果 ∣ A B ∣ = 0 |AB| = 0 ∣AB∣=0
- 那么要么 ∣ A ∣ = 0 |A| = 0 ∣A∣=0,要么 ∣ B ∣ = 0 |B| = 0 ∣B∣=0
- 或者两者都为0
- 推广到高阶矩阵
这个性质对于任意 n×n 矩阵都成立:
- 3×3矩阵:表示体积的变化
- 更高维:表示超体积的变化
理解这个性质很重要,因为它:
4. 建立了矩阵乘法和几何变换之间的联系
5. 简化了复杂矩阵运算的验证
6. 帮助理解线性变换的复合效果
番外二:为什么 ∣ A T ∣ = ∣ A ∣ |A^T| = |A| ∣AT∣=∣A∣ 成立。
1. 先看2×2矩阵的例子
原矩阵
A
A
A:
A
=
[
a
b
c
d
]
A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}
A=[acbd]
转置后
A
T
A^T
AT:
A
T
=
[
a
c
b
d
]
A^T = \begin{bmatrix} a & c \\ b & d \end{bmatrix}
AT=[abcd]
计算它们的行列式:
- ∣ A ∣ = a d − b c |A| = ad - bc ∣A∣=ad−bc
- ∣ A T ∣ = a d − c b = a d − b c |A^T| = ad - cb = ad - bc ∣AT∣=ad−cb=ad−bc
可以看到 ∣ A T ∣ = ∣ A ∣ |A^T| = |A| ∣AT∣=∣A∣
2. 为什么这个性质成立?
-
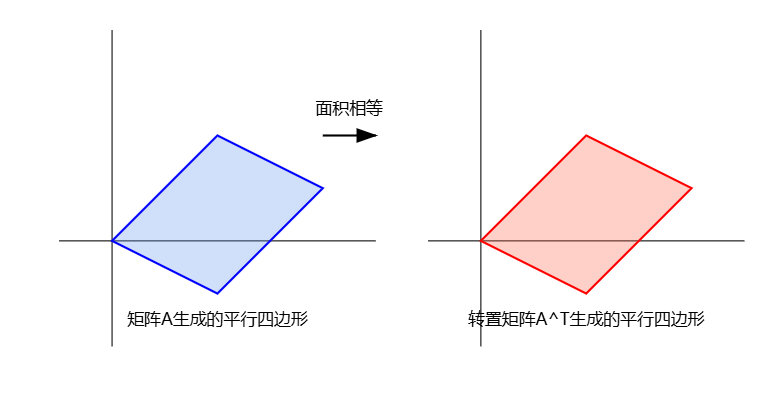
几何意义解释
- 矩阵 A A A 的行列式表示由其列向量构成的平行四边形的面积
- 矩阵 A T A^T AT 的行列式表示由其列向量(即 A A A 的行向量)构成的平行四边形的面积
- 这两个平行四边形实际上是全等的,只是视角不同
- 因此它们的面积必然相等
-
代数性质解释
计算行列式时:- A A A 的行列式按行展开
- A T A^T AT 的行列式按列展开
- 这两种展开方式得到的结果是相同的
-
实际应用
这个性质在很多计算中都很有用:
- 有时候按行计算行列式更容易
- 有时候按列计算行列式更容易
- 这个性质告诉我们可以选择更简单的方式
举个例子:
A
=
[
2
1
3
4
]
A = \begin{bmatrix} 2 & 1 \\ 3 & 4 \end{bmatrix}
A=[2314]
A T = [ 2 3 1 4 ] A^T = \begin{bmatrix} 2 & 3 \\ 1 & 4 \end{bmatrix} AT=[2134]
两者的行列式都是:
∣
A
∣
=
∣
A
T
∣
=
(
2
×
4
)
−
(
1
×
3
)
=
8
−
3
=
5
|A| = |A^T| = (2 \times 4) - (1 \times 3) = 8 - 3 = 5
∣A∣=∣AT∣=(2×4)−(1×3)=8−3=5
这个性质说明矩阵转置不会改变其行列式的值,这在矩阵理论和实际应用中都是一个非常重要的性质。
番外三:某行(列)乘以k,行列式变为原来的k倍
1. 通过2×2矩阵来理解
原矩阵:
A
=
[
a
b
c
d
]
A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}
A=[acbd]
将第一行乘以 k:
A
′
=
[
k
a
k
b
c
d
]
A' = \begin{bmatrix} ka & kb \\ c & d \end{bmatrix}
A′=[kackbd]
计算行列式:
∣
A
′
∣
=
(
k
a
⋅
d
)
−
(
k
b
⋅
c
)
=
k
(
a
d
−
b
c
)
=
k
∣
A
∣
|A'| = (ka \cdot d) - (kb \cdot c) = k(ad - bc) = k|A|
∣A′∣=(ka⋅d)−(kb⋅c)=k(ad−bc)=k∣A∣
2. 几何意义
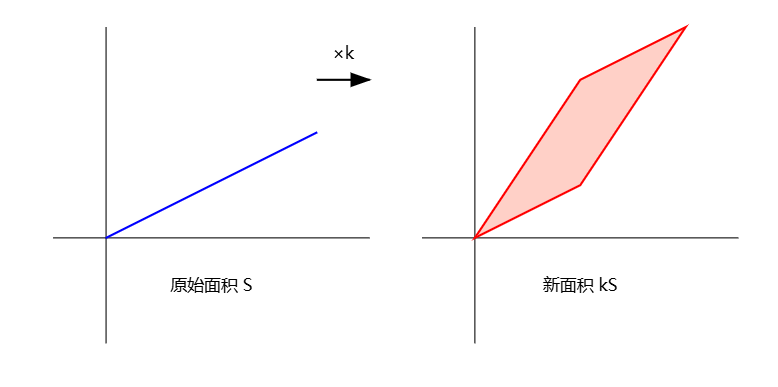
从几何角度看:
- 行列式代表平行四边形的面积
- 将某一行(列)乘以k,相当于将平行四边形沿着一个方向拉伸k倍
- 面积自然也变为原来的k倍
3. 实际例子
以一个具体的2×2矩阵为例:
A
=
[
2
1
3
4
]
,
∣
A
∣
=
5
A = \begin{bmatrix} 2 & 1 \\ 3 & 4 \end{bmatrix}, |A| = 5
A=[2314],∣A∣=5
将第一行乘以2:
A
′
=
[
4
2
3
4
]
,
∣
A
′
∣
=
10
=
2
∣
A
∣
A' = \begin{bmatrix} 4 & 2 \\ 3 & 4 \end{bmatrix}, |A'| = 10 = 2|A|
A′=[4324],∣A′∣=10=2∣A∣
4. 这个性质的应用
这个性质在实际计算中很有用:
- 可以将分数变成整数
比如: |1/2 1| 1 |1 2| |3 4| = 2 * |3 4| - 可以提取公因子简化计算
- 帮助判断行列式的大小关系
5. 注意事项
- 这个性质对任意行或列都成立
- 可以同时应用于多行或多列
- 如果k=0,行列式变为0
- 如果k为负数,也成立,但要注意符号
这个性质的理解对于:
10. 简化行列式计算
11. 理解线性变换
12. 解线性方程组
都很重要。
番外四:行列式互换两行(列),行列式变号
1. 几何解释
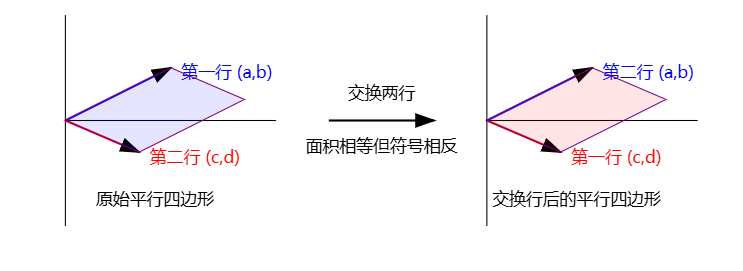
- 行列式的几何意义是有向面积
- 交换两行(列)相当于改变了基向量的方向
- 这导致定向发生改变(从逆时针变为顺时针,或反之)
- 定向改变意味着面积符号改变
2. 代数验证
以2×2矩阵为例:
A
=
[
a
b
c
d
]
,
∣
A
∣
=
a
d
−
b
c
A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}, |A| = ad - bc
A=[acbd],∣A∣=ad−bc
交换两行后:
A
′
=
[
c
d
a
b
]
,
∣
A
′
∣
=
c
b
−
a
d
=
−
(
a
d
−
b
c
)
=
−
∣
A
∣
A' = \begin{bmatrix} c & d \\ a & b \end{bmatrix}, |A'| = cb - ad = -(ad - bc) = -|A|
A′=[cadb],∣A′∣=cb−ad=−(ad−bc)=−∣A∣
- 实际例子
∣ 2 1 3 4 ∣ = 5 \begin{vmatrix} 2 & 1 \\ 3 & 4 \end{vmatrix} = 5 2314 =5
交换两行:
∣
3
4
2
1
∣
=
−
5
\begin{vmatrix} 3 & 4 \\ 2 & 1 \end{vmatrix} = -5
3241
=−5
- 重要应用
这个性质在以下情况很有用:
- 计算行列式时调整行(列)的位置
- 判断排列的奇偶性
- 解线性方程组时的变换
- 注意事项
- 连续交换两次相同的行(列),行列式回到原值
- 交换n次,符号变化n次
- 这个性质对任意维度的矩阵都成立
这个性质反映了行列式的一个基本特征:它不仅描述了大小,还描述了方向。
番外五:某行(列)的k倍加到另一行(列),行列式不变
让我通过几何和代数两种方式来解释为什么某行(列)的k倍加到另一行(列),行列式不变。
1. 代数证明
对于2×2矩阵,设:
A
=
[
a
b
c
d
]
A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}
A=[acbd]
将第一行的k倍加到第二行:
A
′
=
[
a
b
c
+
k
a
d
+
k
b
]
A' = \begin{bmatrix} a & b \\ c+ka & d+kb \end{bmatrix}
A′=[ac+kabd+kb]
计算新的行列式:
∣
A
′
∣
=
a
(
d
+
k
b
)
−
b
(
c
+
k
a
)
=
a
d
+
k
a
b
−
b
c
−
k
a
b
=
a
d
−
b
c
=
∣
A
∣
|A'| = a(d+kb) - b(c+ka) = ad+kab-bc-kab = ad-bc = |A|
∣A′∣=a(d+kb)−b(c+ka)=ad+kab−bc−kab=ad−bc=∣A∣
2. 几何解释
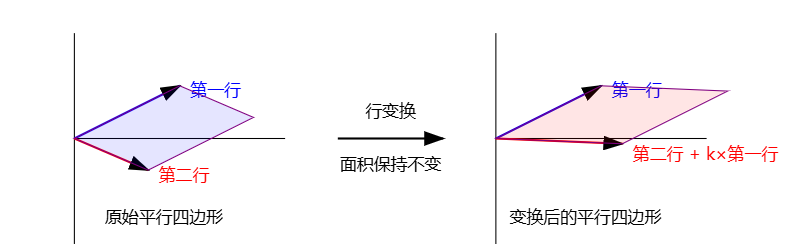
- 原始平行四边形由两个向量确定
- 向一个向量加上另一个向量的k倍,相当于沿着这个方向做剪切变换
- 剪切变换保持平行四边形的面积不变
3. 实例说明
以具体矩阵为例:
∣
2
1
3
4
∣
=
5
\begin{vmatrix} 2 & 1 \\ 3 & 4 \end{vmatrix} = 5
2314
=5
将第一行的2倍加到第二行:
∣
2
1
7
6
∣
=
5
\begin{vmatrix} 2 & 1 \\ 7 & 6 \end{vmatrix} = 5
2716
=5
- 这个性质的应用
- 在高斯消元法中经常使用
- 简化行列式计算
- 解线性方程组时的基本变换
- 为什么这个性质很重要
- 它是初等行变换的基础
- 可以用来将矩阵化简为更容易计算的形式
- 在线性方程组求解中起关键作用
这个性质说明了行列式在某些变换下的不变性,这对于矩阵计算和线性代数的应用都非常重要。
番外六: 三阶行列式计算规律
萨吕斯法则的核心思想
三阶行列式:
D
=
∣
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
∣
D = \begin{vmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{vmatrix}
D=
a11a21a31a12a22a32a13a23a33
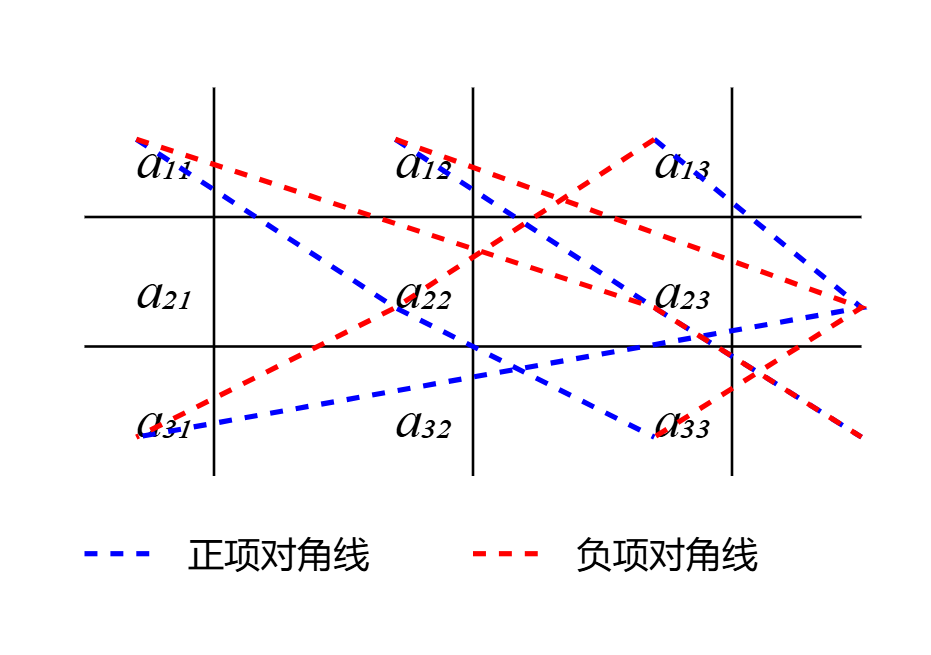
计算步骤和技巧
-
记忆技巧:行列式右侧重复抄写前两行
| a₁₁ a₁₂ a₁₃ | a₁₁ a₁₂ a₁₃ | a₂₁ a₂₂ a₂₃ | a₂₁ a₂₂ a₂₃ | a₃₁ a₃₂ a₃₃ | a₃₁ a₃₂ a₃₃ -
正项计算(蓝色对角线):
- 主对角线: a 11 a 22 a 33 a_{11}a_{22}a_{33} a11a22a33
- 右斜对角线: a 12 a 23 a 31 a_{12}a_{23}a_{31} a12a23a31
- 左斜对角线: a 13 a 21 a 32 a_{13}a_{21}a_{32} a13a21a32
-
负项计算(红色对角线):
- 右侧负对角线: a 13 a 22 a 31 a_{13}a_{22}a_{31} a13a22a31
- 中间负对角线: a 11 a 23 a 32 a_{11}a_{23}a_{32} a11a23a32
- 左侧负对角线: a 12 a 21 a 33 a_{12}a_{21}a_{33} a12a21a33
实际例题演示
计算下面的行列式:
D
=
∣
2
1
−
1
3
0
2
1
−
1
4
∣
D = \begin{vmatrix} 2 & 1 & -1 \\ 3 & 0 & 2 \\ 1 & -1 & 4 \end{vmatrix}
D=
23110−1−124
解题步骤:
-
先写出完整的展开式:
2 1 -1 | 2 1 3 0 2 | 3 0 1 -1 4 | -
计算正项(蓝色对角线):
- 2 ⋅ 0 ⋅ 4 = 0 2 \cdot 0 \cdot 4 = 0 2⋅0⋅4=0
- 1 ⋅ 2 ⋅ 1 = 2 1 \cdot 2 \cdot 1 = 2 1⋅2⋅1=2
- ( − 1 ) ⋅ 3 ⋅ ( − 1 ) = 3 (-1) \cdot 3 \cdot (-1) = 3 (−1)⋅3⋅(−1)=3
- 正项和 = 0 + 2 + 3 = 5 0 + 2 + 3 = 5 0+2+3=5
-
计算负项(红色对角线):
- ( − 1 ) ⋅ 0 ⋅ 1 = 0 (-1) \cdot 0 \cdot 1 = 0 (−1)⋅0⋅1=0
- 2 ⋅ 2 ⋅ ( − 1 ) = − 4 2 \cdot 2 \cdot (-1) = -4 2⋅2⋅(−1)=−4
- 1 ⋅ 3 ⋅ 4 = 12 1 \cdot 3 \cdot 4 = 12 1⋅3⋅4=12
- 负项和 = 0 − 4 + 12 = 8 0 - 4 + 12 = 8 0−4+12=8
-
最终结果:
D = 5 − 8 = − 3 D = 5 - 8 = -3 D=5−8=−3
使用技巧
- 对角线追踪法:用手指或笔沿着对角线追踪,避免遗漏或重复
- 正负区分:正项对角线都是从左上到右下方向,负项对角线都是从右上到左下方向
- 零元素利用:若行列式中有零元素,优先计算含零元素的对角线(因为乘积必为零)
- 数字简化:先做乘法,最后统一做加减法,减少计算错误
通过这种可视化的方式和具体的例子,相信你能更好地理解和运用萨吕斯法则。记住,熟能生巧,多做练习才能真正掌握这个技巧。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











