







 本文讲述了作者在实习期间遇到公司入网小助手卸载需要密码的问题,分享了解决方案,包括使用任务管理器结束进程、删除特定文件并重启电脑以阻止自动启动。
本文讲述了作者在实习期间遇到公司入网小助手卸载需要密码的问题,分享了解决方案,包括使用任务管理器结束进程、删除特定文件并重启电脑以阻止自动启动。
-
实习的时候装了公司的入网小助手,今天卸载的时候突然发现要密码,在网上搜寻半天解决方法都比较复杂,最后找到个解决办法,亲测可用。

-
打开任务管理器找到 IsaHelp 进程,然后右击打开文件所在位置

-
C:\Windows\SysWOW64\IsAgent文件夹中全选进行删除,注意部分文件会提醒正在运行中,这时候打开任务管理器,在进程把lsHelp的相关进程全部选择结束任务。

-
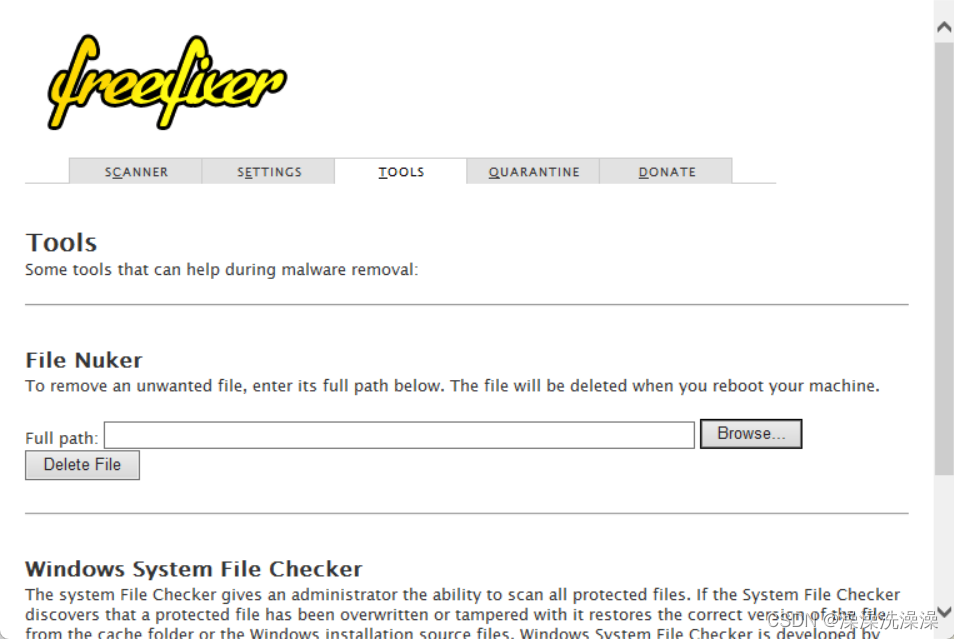
有些文件始终无法删除,需下载一个freefixer
-
点击Browse把C:\Windows\SysWOW64\IsAgent里边剩余无法删除的文件添加到Full path点击Delete File,这时候文件不会立即删除,需要重启,把所有文件都添加一遍,然后重启电脑,这个时候ASM已经不会自动启动了,然后去C:\Windows\SysWOW64\IsAgent看一下,如果还有IsAgent,把IsAgent文件夹删除即可

















02-04
 3003
3003
3003
06-05
7340
7340
08-27
2854
2854
01-14

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









