







- 一阶滞后环节
- 二阶滞后环节
- 积分要素
- 比例要素
💗1.什么是积分要素
当输入输出关系可以用以下的一阶线性微分方程表示时,我们称之为积分元件。
y
˙
(
t
)
=
b
0
u
(
t
)
\dot{y}(t) = b_0 u(t)
y˙(t)=b0u(t)
对其进行拉普拉斯变换后,可以得到如下表达式:
Y
(
s
)
=
b
0
s
⏟
G
(
s
)
U
(
s
)
Y(s) = \underbrace{\frac{b_0}{s}}_{G(s)} U(s)
Y(s)=G(s)
sb0U(s)
这里的关键点在于传递函数中包含了一个表示积分的 1 / s 1/s 1/s(积分器)。
微分方程的解可以在不进行拉普拉斯变换的情况下,通过输入的积分直接获得(这里假设 y 的初始值为 0):
y
(
t
)
=
b
0
∫
0
t
u
(
τ
)
d
τ
y(t) = {b_0} \int _0 ^t u(\tau) d\tau
y(t)=b0∫0tu(τ)dτ
因此,可以将积分元件想象成“时刻记录并累积所给定输入的过程”。
接下来,我们将介绍由积分元件表示的系统示例及其传递函数。
## 💓无阻尼平移运动系统的传递函数
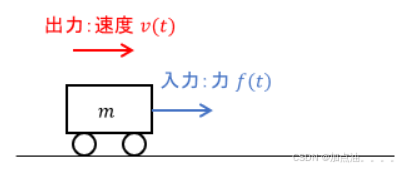
输入是作用在台车上的力
f
(
t
)
f(t)
f(t),输出是台车的速度
v
(
t
)
v(t)
v(t),
m
m
m是台车的质量。这是一个在一阶系统中考虑、没有空气阻力的情况下的例子。求这个台车的运动方程,可以得到以下表达式。
m
v
˙
(
t
)
=
f
(
t
)
m\dot{v}(t) = f(t)
mv˙(t)=f(t)
对上述方程进行拉普拉斯变换并整理关于输出的表达式,就可以得到传递函数。
KaTeX parse error: No such environment: gather at position 8: \begin{̲g̲a̲t̲h̲e̲r̲}̲msV(s) = F(s) \…
可以理解为,所施加的力作为运动能量随着时间不断累积,从而逐渐形成速度。
💗2.什么是比例要素
输入输出关系可以用下式表示的,被称为比例元件。
y
(
t
)
=
K
u
(
t
)
y(t) = K u(t)
y(t)=Ku(t)
即使进行拉普拉斯变换,比例关系仍然成立。
Y
(
s
)
=
K
⏟
G
(
s
)
U
(
s
)
Y(s) = \underbrace{K}_{G(s)} U(s)
Y(s)=G(s)
KU(s)
因为这只是一个代数方程而非微分方程,所以比例元件是一个静态系统。
💓例子:弹簧的传递函数
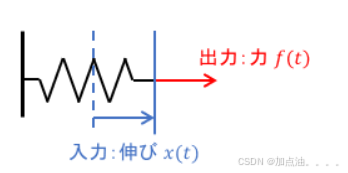
输入是弹簧的伸长
x
(
t
)
x(t)
x(t) ,输出是力
f
(
t
)
f(t)
f(t), k 是弹簧常数。这些关系由胡克定律表示。
f
(
t
)
=
k
x
(
t
)
f(t)=kx(t)
f(t)=kx(t)
即使进行拉普拉斯变换,比例关系仍然成立。
F
(
s
)
=
K
⏟
G
(
s
)
X
(
s
)
F(s) = \underbrace{K}_{G(s)} X(s)
F(s)=G(s)
KX(s)
💗更复杂的系统
到目前为止,我们介绍的是传递函数基础中非常简单的系统。对于更加复杂的系统(即微分方程阶数为三阶或以上的系统),这些被称为高阶系统。
尽管高阶系统确实复杂,但已知的是,它们的大部分传递函数可以通过一阶滞后元件、二阶滞后元件、积分元件和比例元件的组合来表示。
因此,只要理解了这里介绍的各种基本元件,就可以将这些概念直接扩展应用到高阶系统中。可以说,掌握了基本系统也就掌握了高阶系统!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









