







偶然机会,因合作项目需要收到了PicoZense TOF 深度摄像头 DCAM710,一款高性能的基于TOF的RGBD摄像头模组。
开箱
打开包装,看到的是 DCAM710的白色包装盒(12.4cm * 12.4cm * 5.4cm),外包装感觉简单干净
DCAM710的清单包含3样物品:
- 摄像头模组一部
- 电源适配器一部
- USB 数据线一根

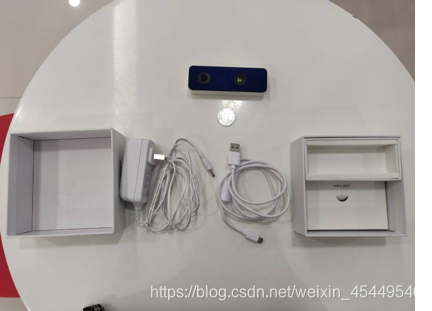
打开盒子,映入眼帘的摄像头模组(103mm * 22mm * 33mm)和电源适配器;摄像头模组背部标签介绍了摄像头的主要指标值,分别是深度图的 FOV,RGB 图的 FOV,以及校正深度等;另外摄像头的底部有具体型号的介绍。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1848
1848











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









