




 本文介绍了基于STM32开发心率血氧监测小型设备的过程。硬件采用stm32f103c8t6、MAX30102和0.96寸OLED,软件使用keil5。详细说明了cubemx配置工程文件、MAX30102驱动、硬件I2c驱动OLED等步骤,还给出了算法代码及获取方式。
本文介绍了基于STM32开发心率血氧监测小型设备的过程。硬件采用stm32f103c8t6、MAX30102和0.96寸OLED,软件使用keil5。详细说明了cubemx配置工程文件、MAX30102驱动、硬件I2c驱动OLED等步骤,还给出了算法代码及获取方式。
一、前言
Max30102是一款集成了红外发光二极管、光电检测器、信号处理和数据输出功能于一体的脉搏血氧测量模块。它能够通过皮肤进行非侵入式的心率和血氧饱和度监测,常被用于可穿戴设备或医疗设备中。Max30102具有高精度、低功耗和小尺寸的特点,广泛应用于健康监测领域。于是准备做个监测心率血氧的小型设备。
二、准备
硬件:stm32f103c8t6,MAX30102,0.96寸OLED
软件:keil5
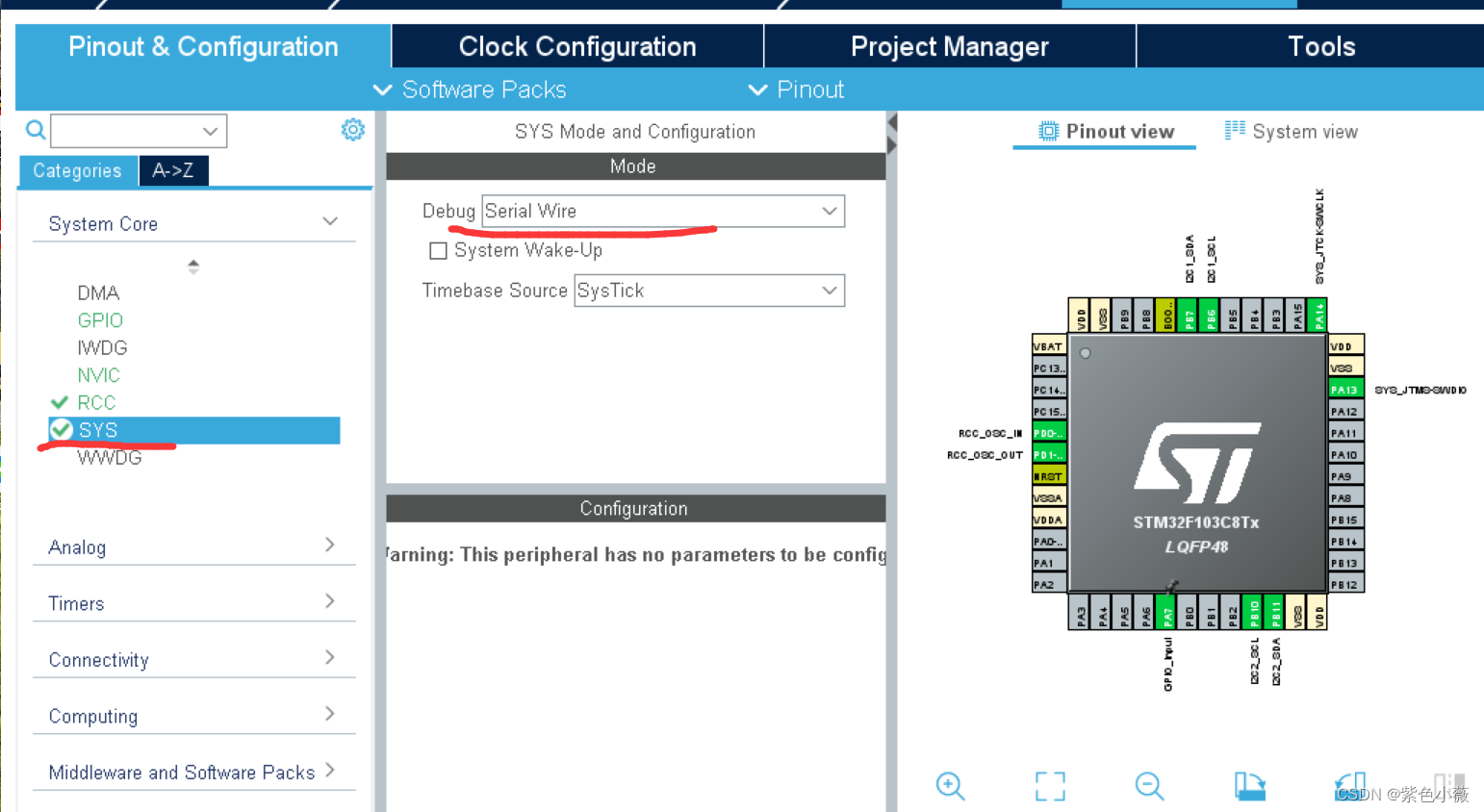
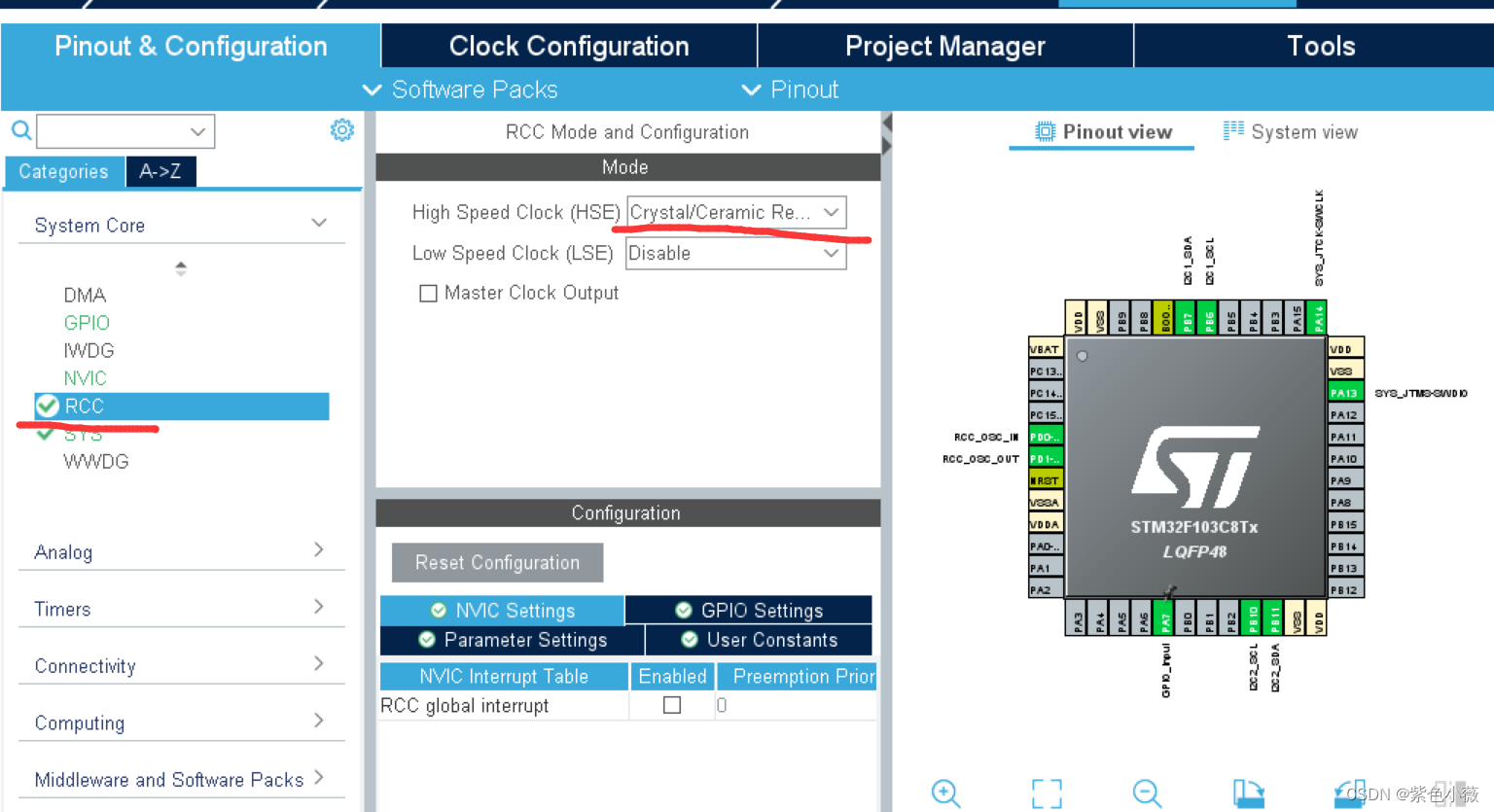
三、cubemx配置工程文件
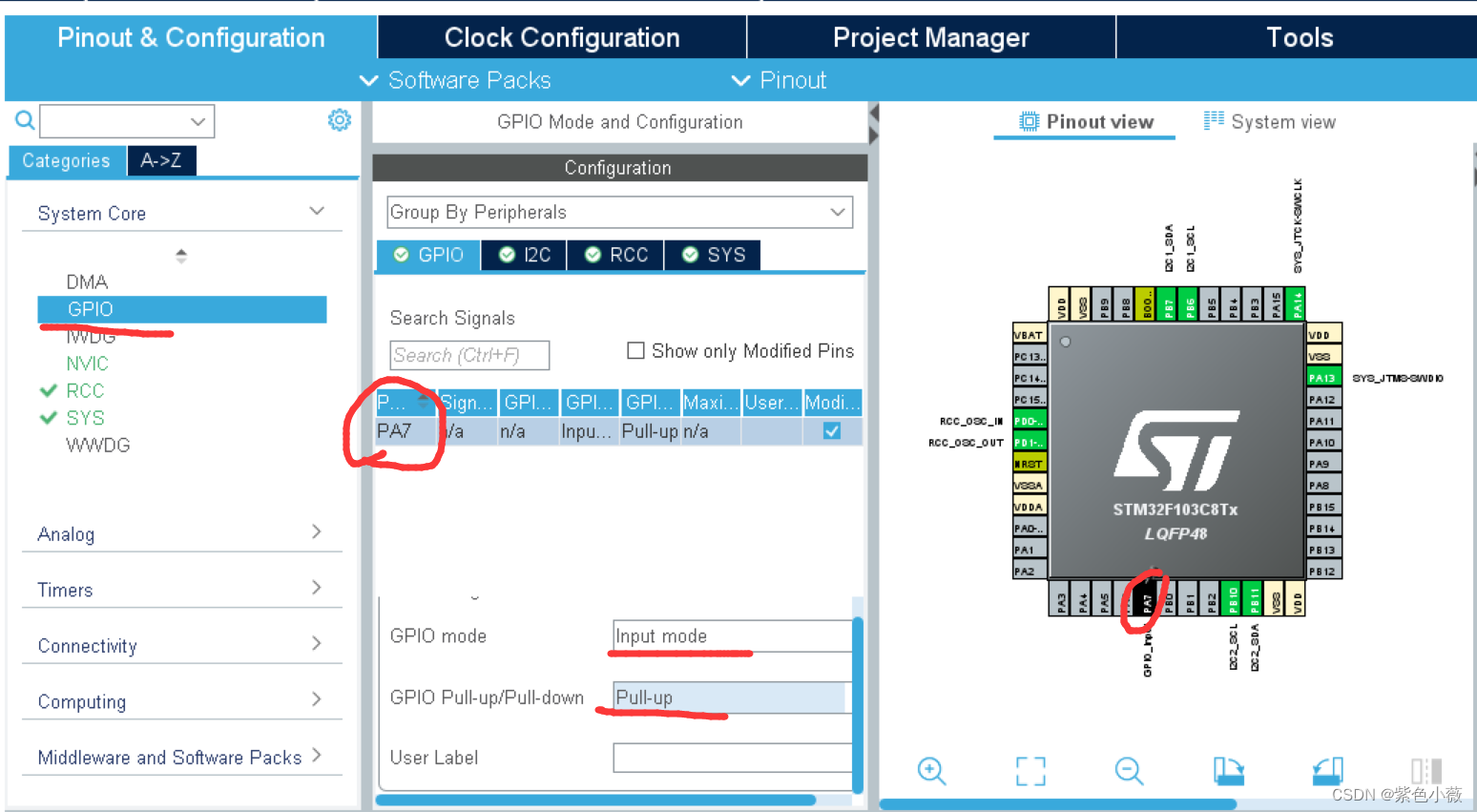
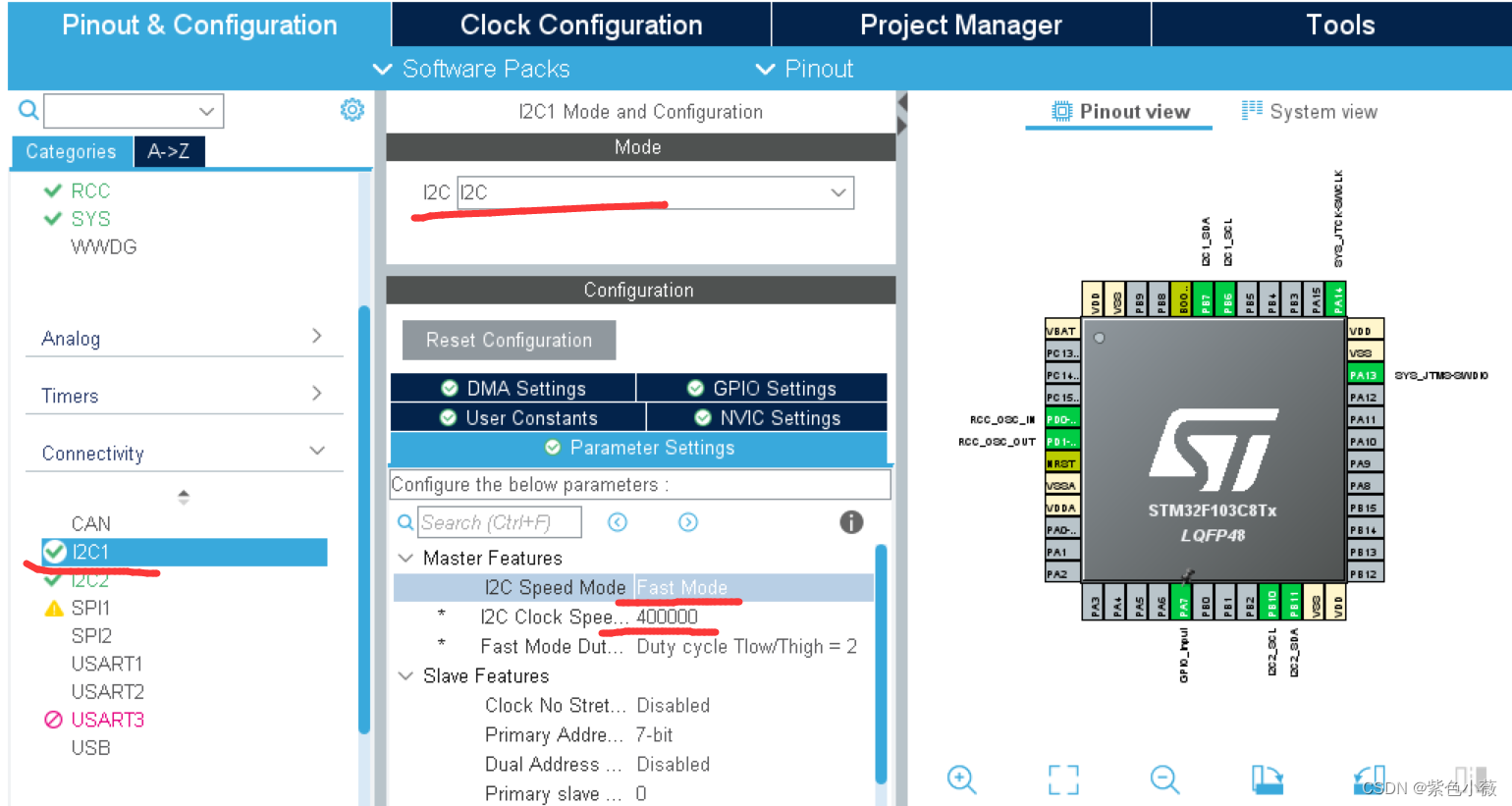
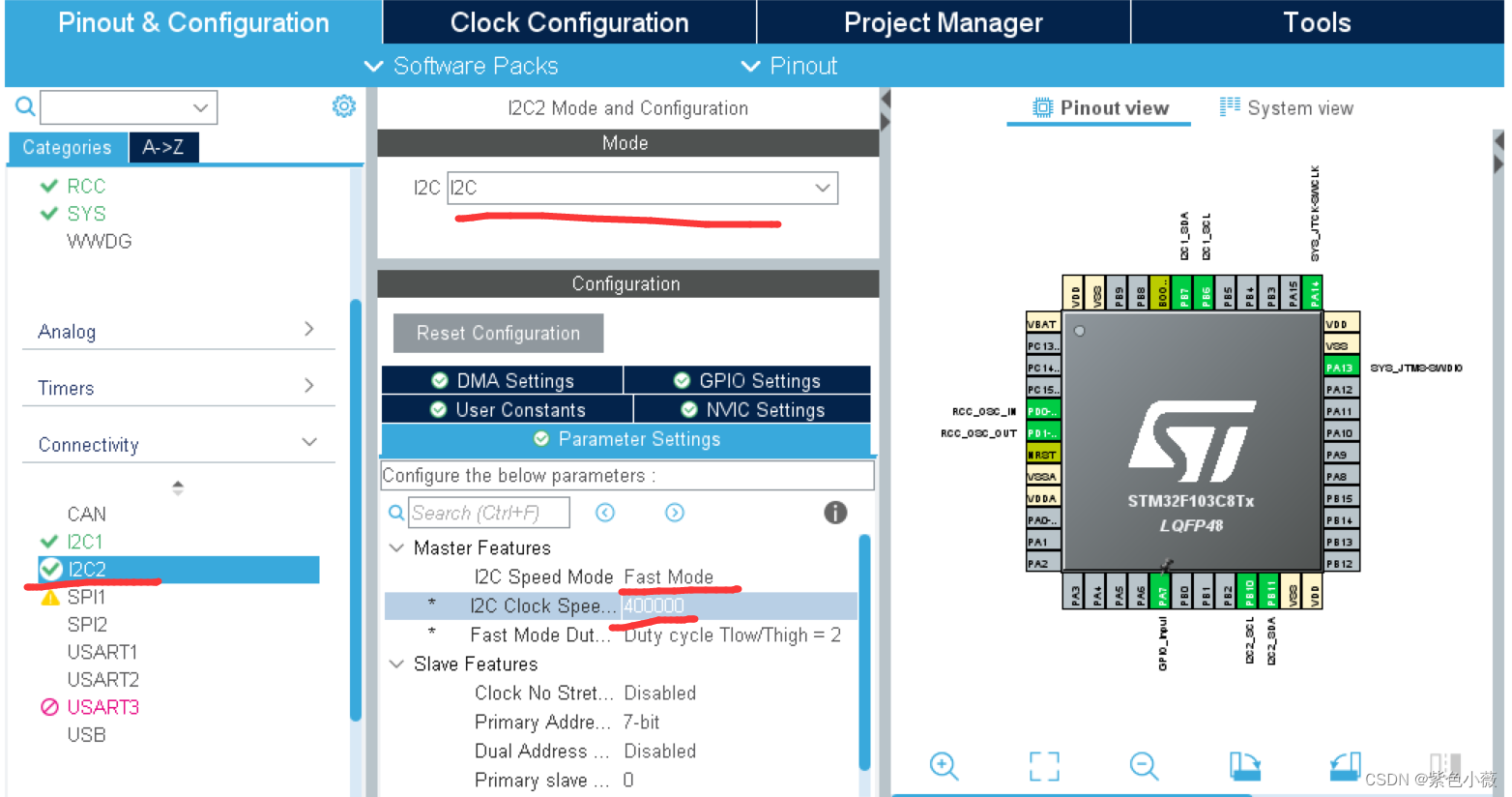
配置SYS,RCC,时钟数,I2C1(用于OLED),I2C2(用于MAX30102),GPIO
PA7配置为INT引脚,输入模式,配上拉电阻(INT默认高电平,低电平有效)
I2C1和I2C2都配置为高速I2C(只为了更快)
生成工程文件
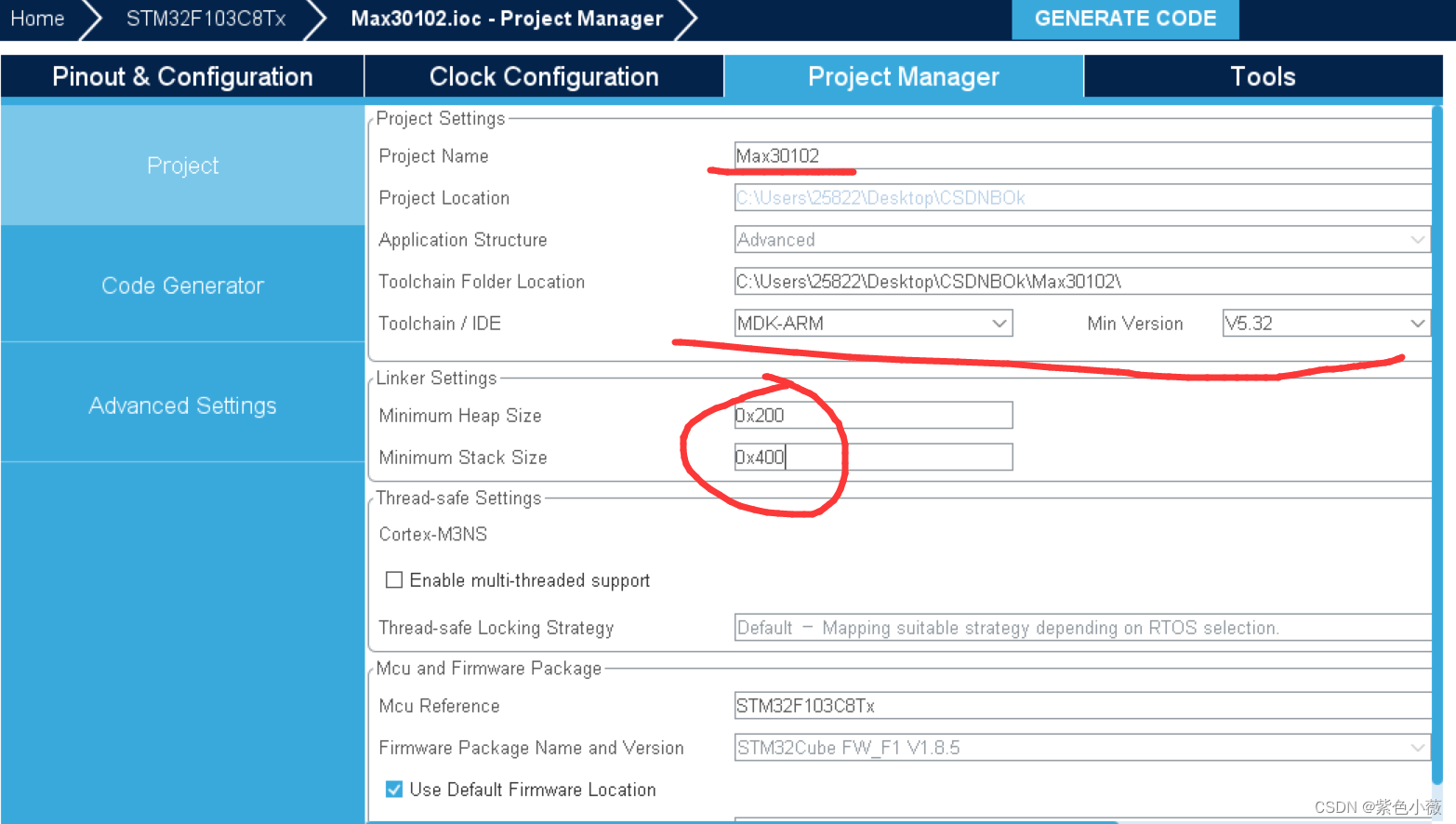
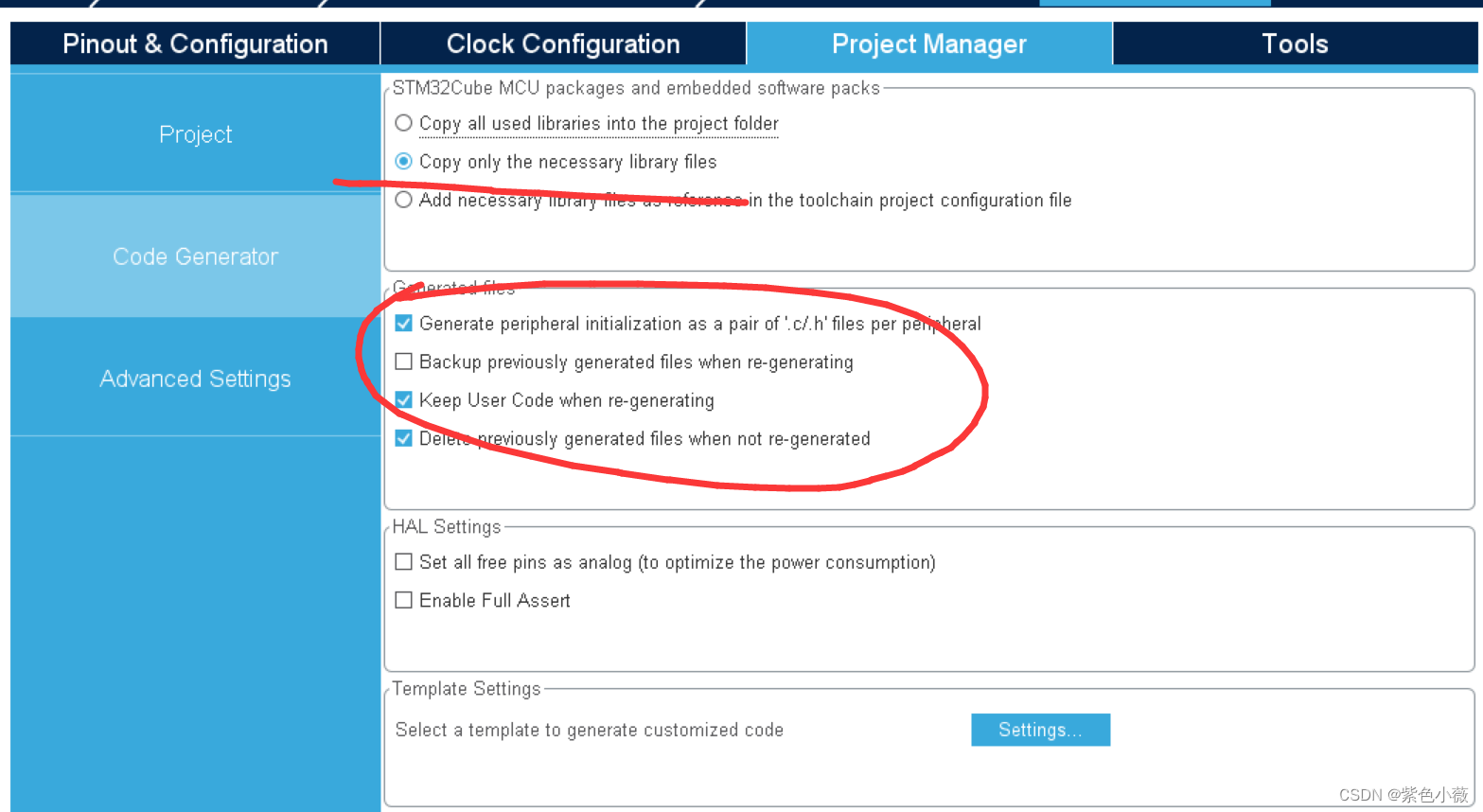
生成并进入工程文件
四、MAX30102驱动
4.1 读取FIFO函数
//写Data到max30102中
HAL_StatusTypeDef Max30102_WriteData(uint8_t MemAddress,uint8_t Command,uint16_t SendCount)
{
HAL_StatusTypeDef status=HAL_OK;
status=HAL_I2C_Mem_Write(&hi2c2,Max30102_Write_Address,MemAddress,I2C_MEMADD_SIZE_8BIT,&Command,SendCount,100);
return status;
}
//I2C读取函数
HAL_StatusTypeDef Max30102_ReadData(uint8_t DatAddress,uint8_t *Data,uint16_t ReceiveCount)
{
HAL_StatusTypeDef status=HAL_OK;
status=HAL_I2C_Mem_Read(&hi2c2,Max30102_Read_Address,DatAddress,I2C_MEMADD_SIZE_8BIT,Data,ReceiveCount,100);
return status;
}
void Max30102_FIFO_ReadData(uint8_t DatAddress,uint8_t SixData[6],uint16_t Size)
{
uint8_t temp;
Max30102_ReadData(REG_INTR_STATUS_1,&temp,1);
Max30102_ReadData(REG_INTR_STATUS_2,&temp,1);
Max30102_ReadData(DatAddress,SixData,Size);
}4.2 MAX30102初始化
void Max30102_Reset(void)
{
Max30102_WriteData(REG_MODE_CONFIG,0x40,1);
Max30102_WriteData(REG_MODE_CONFIG,0x40,1);
}
void Max30102_Init(void)
{
Max30102_Reset();
Max30102_WriteData(REG_INTR_ENABLE_1,0xc0,1); // INTR setting
Max30102_WriteData(REG_INTR_ENABLE_2,0x00,1);
Max30102_WriteData(REG_FIFO_WR_PTR,0x00,1); //FIFO_WR_PTR[4:0]
Max30102_WriteData(REG_OVF_COUNTER,0x00,1); //OVF_COUNTER[4:0]
Max30102_WriteData(REG_FIFO_RD_PTR,0x00,1); //FIFO_RD_PTR[4:0]
Max30102_WriteData(REG_FIFO_CONFIG,0x0f,1); //sample avg = 1, fifo rollover=false, fifo almost full = 17
Max30102_WriteData(REG_MODE_CONFIG,0x03,1); //0x02 for Red only, 0x03 for SpO2 mode 0x07 multimode LED
Max30102_WriteData(REG_SPO2_CONFIG,0x27,1); // SPO2_ADC range = 4096nA, SPO2 sample rate (100 Hz), LED pulseWidth (400uS)
Max30102_WriteData(REG_LED1_PA,0x24,1); //Choose value for ~ 7mA for LED1
Max30102_WriteData(REG_LED2_PA,0x24,1); // Choose value for ~ 7mA for LED2
Max30102_WriteData(REG_PILOT_PA,0x7f,1); // Choose value for ~ 25mA for Pilot LED
}先连接好线,把初始化程序烧进去,如果MAX30102红灯亮则没问题可以继续下一步,如果红灯不亮,大概率是I2C没通,仔细检查是不是线没接好!
MAX30102接线:
SCL-----PB10 SDA-----PB11 INT-----PA7
OLED接线:
SCL-----PB6 SDA-----PB7
4.3 MAX30102算法实现心率血氧检测
在写MAX30102程序前先把下面的algorithm文件放入工程文件中并在Keil5中添加文件路径,这是一个针对于心率血氧的算法,把前辈研究好的东西拿来用也是不错的!algorithm文件中的.c和.h文件代码的代码我放在最下面。也可以直接下载我上传的文件解压即可。
链接:https://pan.baidu.com/s/1-GGcoyf4qizAIo3MfZ7qug
提取码:ae86
MAX30102心率血氧读取代码(代码以注释明确)
4.3.1 各种变量的声明
uint8_t TempData[6];
uint32_t red_buffer[500]; //红光数据red,用于计算心率
uint32_t ir_buffer[500]; //红外数据 ir,用于计算血氧
int32_t ir_buffer_length=500; //计算前500个样本得到的数据
int32_t pn_SpO2_value; //血氧实际值
int8_t SpO2_valid; //血氧值有效标志
int32_t pn_hr_value; //心率实际值
int8_t hr_valid; //心率有效标志
uint32_t red_max=0,red_min=0x3FFFF; //红光取值范围
uint32_t prev_data; //前一次的值
float f_temp; //临时变量
int32_t n_brightness; //明确变量 4.3.2 MAX30102数据初始化函数
void Max30102_Safety(void)
{
for(int i=0;i<ir_buffer_length;i++)
{
while(Max30102_INT==GPIO_PIN_SET); //等待中断引脚相应,默认为高,当触发后会拉低
Max30102_FIFO_ReadData(REG_FIFO_DATA,TempData,6);
red_buffer[i]=((TempData[0]&0x03)<<16) | (TempData[1]<<8) | (TempData[2]); //前三位数据组成HR
ir_buffer[i]=((TempData[3]&0x03)<<16) | (TempData[4]<<8) | (TempData[5]); //后三位数据组成BO
if(red_min>red_buffer[i]) red_min=red_buffer[i]; //更新当前最小值
if(red_max<red_buffer[i]) red_max=red_buffer[i]; //更新当前最大值
}
maxim_heart_rate_and_oxygen_saturation(ir_buffer,ir_buffer_length,red_buffer,&pn_SpO2_value,&SpO2_valid,&pn_hr_value,&hr_valid);
//传入500个采样,通过算法得出实际心率血氧值
}4.3.3 心率血氧计算函数
void Max30102_Calculate_HR_BO_Value(int32_t* HR_Value,int8_t* HR_Valid,int32_t* BO_Value,int8_t* BO_Valid)
{
for(int i=100;i<500;i++) //将数组中的100~500采样值向前挪到0~400
{
red_buffer[i-100]=red_buffer[i];
ir_buffer[i-100]=ir_buffer[i];
if(red_min>red_buffer[i]) red_min=red_buffer[i]; //更新当前最小值
if(red_max<red_buffer[i]) red_max=red_buffer[i]; //更新当前最大值
}
for(int i=400;i<500;i++) //实际只取100个采样值来计算
{
prev_data=red_buffer[i-1] 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











