






学习《A Tutorial on Joint Radar and Communication Transmission for Vehicular Networks - Part I: Background and Fundamentals》笔记
名词注释
Dual-functional radar-communication(DFRC):双功能雷达通信-相当于ISAC
Vehicle-to-everything(V2X):车联万物
WiFi-based positioning system(WPS):基于WiFi的定位系统
Unmanned aerial vehical(UAV):无人机
Radar cross-section(RCS):雷达横截面
Pulse repetition interval(PRI):脉冲重复间隔
Binary hypothesis testing(BHT):二元假设检验
lower bound(CRLB):CR下界
Multi-user multi-input multi-output(MU-MIMO):多用户多输入输出
Multi-user interference(MUI):多用户干扰
Constant-modulus constraint(CMC):恒模量约束
Similarity constraint(SC):相似度约束
Signal-to-interference-plus-noise-ratio(SINR):信噪比
DFRC
DFRC的提出背景:频谱资源稀缺
DFRC可行性:商用通信频率在6GHz以下,与雷达有共存可能
DFRC的应用场景:①车联网:在保证机动性的条件下,减少载荷,提高感知与通信性能。②WiFi感知:基于WiFi设计室内的感知定位系统。WiFi感知雷达分两类,一类是被动雷达,对接收信号被动的进行分析处理;另一类是主动雷达,对反射信号的微多普勒特征进行处理分析。③无人机的联合传感与通信。。。。。
雷达信号模型与性能指标
雷达通过脉冲回波获取目标信息
①模型:探测点状目标的多天线脉冲雷达,具有个发射天线与
个接收天线,雷达探测获得目标的参数:距离d,方位角θ,径向速度v
令雷达信号为![]()
则接收回波信号可表示为

β为往返路径损失与目标的雷达横截面;多普勒频率=
,其中
为载波频率,c为光速;a(θ)、b(θ)分别为发射转向向量与接收转向向量,两者均由雷达的几何形状决定;往返时延τ=
;
(t)为方差为
加性高斯白噪声(实际还包含非目标物体反射的杂波)。
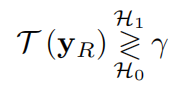
②判断是否有目标:BHT问题,假设如下

将接收到的回波经过检验器(·)映射为实数,与设定的阈值
做对比
③检测器性能评估指标:为检出率,
为虚警率,计算公式如下图
![]()
对检测器性能的影响大,故在设计检测器时应遵守Neyman-Pearson准则:在
小于固定值的条件下最大化
。
④确认目标存在后,通过评估器F(·)估计目标参数
![]()
评估器F(·)针对不同参数分别涉及
⑤评估器性能评估指标:均方误差:以方位角θ为例,指标为
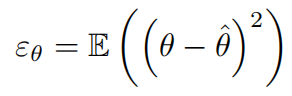
由于均方误差难以获取,替代指标为CRLB,所有无偏估计的方差的下界
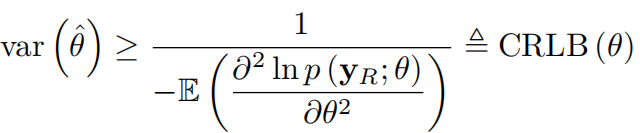
为给定的
的似然函数
下行通信模型与性能指标
①模型:N个基站K个终端的MU-MIMO网络
令终端接收信号为(t)=Hx(t)+
(t)。x(t)为发送信号;H为网络信道矩阵,
(t)为方差为
的加性高斯白噪声。
将各数据流表示为![]() ,对数据流进行预编码可获得发送信号:
,对数据流进行预编码可获得发送信号:
![]()
若为线性预编码,则过程可表示为:
![]()
W为预编码矩阵
②通信性能指标:SINR:
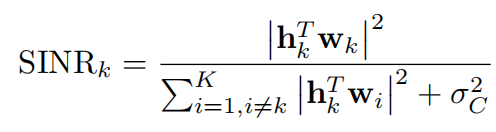
优化SINR的方案:应用较多的是使k个用户中最小的SINR最大化,另一种是为每个用户设置固定的SINR阈值
DFRC的两类
一、以雷达为基础
将信息嵌入传感波形中,表示如下式:
![]()
C(·)将信号(t)嵌入雷达波形
(t)中
嵌入方法:
①时频嵌入:以雷达波形为载波,在时域或频域进行调制
②码域嵌入:多相码通过扩频进行调制
③空间嵌入:主波束用于雷达感知,侧波束用于通信
二、以通信为基础
调整通信波形以满足传感约束,提高感知性能,表示如下式:
![]()
R(·)对发送信号x(t)进行整形,已符合以下要求:
①低侧频水平:减小杂波及非感知目标的干扰,发射信号侧波在各域处于最小水平
②恒模量传输:确保反射回波的SINR足够大,发射端以最大可行功率输出
③杂波抑制:杂波强度与发射波形有关,发射端对波形进行设计以抑制杂波
三、以MU-MIMO为模型的DFRC例子
与上面MU-MIMO系统相似,但接收信号表示为下式:
性能优化方案
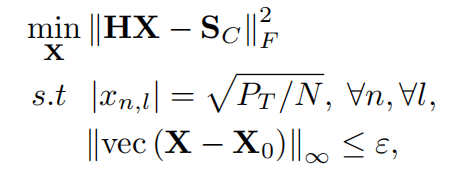
第二行为恒模量约束CMC,第三行为相似度约束,在满足以上两种约束的条件下最小化用户间干扰MUI
车载DFRC
传统毫米波通信首先在发射端发送导频信号,估计收发两端角度,将角度从接收端反馈给发送端,从而建立通信链路,但传统方法不适合高移动性,时延要求高的驾驶应用场景,所以提出了车载DFRC的思想:将车载雷达的侧波束用于波束跟踪,用车辆的反射信号代替反馈信号用于发送端估计接收端的角度来建立通信链路。
总结
本文为整篇论文的第一部分,主要介绍DFRC的背景以及雷达与通信的基础知识,在最后简要介绍了车载DFRC,具体会在第二部分说明。DFRC与ISAC本质相同,与前一篇部分知识相同,但整篇主要内容为车联网应用中的通感一体,并且这篇分为三部分,第一部分对于雷达和通信基础知识的介绍简明扼要,很有用处。
知识输出促进消化,意在记录学习过程,希望大佬们看到错误可以指出。

















 2256
2256

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









