







最近点对问题介绍
在二维平面内的n个点中,找出(欧式)距离最近的两个点
问题解决的初步思路
蛮力法(Brute Force),实现过程大致为:
- 遍历二维平面内的所有点,并计算任意两点之间的距离
- 注意比较这些距离的大小,找出其中的最短距离,则这两点即为所求的"最近点对"
总共有 C(n, 2) 种组合,即 n×(n-1)/2,时间复杂度为 O(n2)
暴力枚举的伪代码:

蛮力法很容易想到,但算法的时间复杂度很高,这时就要引入一种算法设计思想 —— 分治策略(Divide and Conquer)
最近点对问题分治法初步分析
步骤: 设集合S用数组 S[1, …, n] 表示
- 分解: 根据x坐标对S中的点升序排序,以经过点 S[n/2] 的垂直线L将S均分为两个子集:
Sl = S[1, …, m] Sr = S[m+1, …, n],其中,m = n / 2 - 递归: 用同样的分治算法分别求 Sl 和 Sr 的最近点对的距离dl 和dr
- 组合: 求 Sl 中的点和 Sr 中的点之间的最近距离 d’ ,则S中点对的最近距离为 min{dl, dr, d’}
分析:
如何求 d’ ?
一种最简单的方法就是把 Sl 中的所有点与 Sr 中的所有点计算距离,但时间复杂度太高
如何筛选出尽量少的中间点对?
我们知道组合步骤是在递归步骤之后,所以此时 dl 和 dr 已经被求出来了,所以我们在求 d’ 是可以利用 dl 和 dr
令 d’ = min (dl, dr),Tl 和 Tr 分别为 Sl 和 Sr 中与垂线的距离 ≤ d‘ 的点组成的子集,T = Tl ∪ Tr

这样子不就简化了算法吗,但隐隐之中感觉似乎漏掉了些什么…
接下来探讨最坏情况,如果非常多的点都是集中在分割线的附近,这时候仅仅只是排除掉了几个点而已,可以看到最坏情况下依然是 O(n2)

最近点对问题分治法进一步分析
首先我们要知道几个性质,看看能不能利用这些性质来设计高效的算法
假设如果存在 Pl ∈ Sl,Pr ∈ Sr,使得 dist(Pl, Pr) = D 且 D < d’ [ dist() 是求两点之间距离的函数],于是 (Pl, Pr) 必定满足:
-
Pl ∈ Tl,Pr ∈ Tr,即这两点必定分布在垂线两侧
如果 (Pl, Pr) 同属于Tl或Tr 同一侧,即在Tl或Tr 一侧能够找到两个点,使得这两点的距离为D(<d’),这与 Sl 和 Sr 的最近点对距离为 dl 和 dr 矛盾 (别忘了d’ = min{dl, dr}) -
Pl,Pr位于以垂线为中轴线的 2d’ × d’ 的矩形区域内
看我用红线连接的那两个点,没有框在矩形区域内,可以看见它们之间的距离一定会大于 d’,即 dist(Pl, Pr) > d’ ,与之前的假设 dist(Pl, Pr) = D 且 D < d’ 矛盾

-
以垂线为中轴线的 2d’ × d’ 的矩形区域中至多含T中的6个点,且 Tl 和 Tr 中各至多有4个
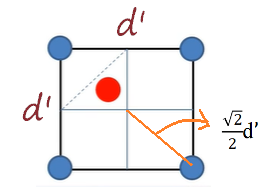
我们取 2d’ × d’ 矩形的右边一半出来,即为 d’ × d’ 的小矩形,假设已经有四个点分布在这个矩形的四个角,那么矩形内部无法再有任何点存在,因为这个小矩形是 ∈ Tr,假设如果小矩形内还有一个红点,令该点距离其余四点距离均最远,那么该红点必定在小矩形的中心位置,距离其余四个点的距离为 (√2d’) / 2 < d’ ,我们要始终记得d’本身的含义,它是Tl,Tr 中的最小值,不可能有比d’还要小的距离出现,矛盾,所以小矩形至多只能放4个点,左边的小矩形也至多能放4个点,两个小矩形会有两个点重合,所以 2d’ × d’ 的矩形中至多只能有6个点
根据以上的性质,我们可以得出:
1)如果把T中的点按照Y坐标升序排序,任取一点T[i],那么 T[i + 7] 与 T[i] 的距离肯定超过 d’
2)如果把Tl中的点按照Y坐标升序排列 [Tl也就是取矩形的左边部分],任取一点Tl[i],那么 Tr[i + 5] 与 Tl[i] 的距离肯定超过 d’。Tr 有同样的性质
分治策略的伪代码:

算法的时间复杂度不好说,如果你有去看其他博客,你会发现有两种版本,原因在于对y轴坐标排序是放函数外,还是放函数内的不同,使得时间复杂度有两种写法,两者造成的区别其实是在于n的数据集大小
题目集
| 题目链接 | 难度 | 算法简介 |
|---|---|---|
| P1429 平面最近点对(加强版) | ★☆☆☆☆ | 模板题 |
| ZOJ2107 Quoit Design | ★☆☆☆☆ | 模板题 |
| POJ3714 Raid | ★☆☆☆☆ | 模板题 |
P1429 平面最近点对(加强版)

代码
- 语言支持:c++
c++ Code:
#include<iostream>
#include<algorithm>
#include<cmath>
#include<cstdio>
#include<vector>
#include<climits>
using namespace std;
typedef struct node{
int x, y;
}Point;
vector<Point> T(300005); // 放函数体外,不然每次都要动态分配如此巨大的数组
/*
求两点间距离
param : 两个点坐标
return : 距离(double型)
*/
double dist(Point p1, Point p2)
{
return sqrt((double)(p1.x - p2.x) * (p1.x - p2.x) + (double)(p1.y - p2.y) * (p1.y - p2.y));
}
/*
sort()里的比较函数,对x进行升序排序,若x相同则依照y进行升序排序
param : 两个点
return : 两点横纵坐标比较大小后的结果
*/
bool cmpx(Point a, Point b)
{
if (a.x == b.x)
return a.y < b.y;
return a.x < b.x;
}
/*
sort()里的比较函数,对y进行排序
param : 两个点
return : 两点纵坐标比较大小后的结果
*/
bool cmpy(Point a, Point b)
{
return a.y < b.y;
}
/*
分治法求最近点对
param : 点的数组,low, high 两个指针/标记
return : 最近点对的距离
*/
double Merge(vector<Point>& P, int low, int mid, int high, double d)
{
int k = 0;
for (int i = low; i <= high; i++){
if (fabs(1.0 * P[mid].x - 1.0 * P[i].x) < d)
T[k++] = P[i];
}
// k是T的大小
sort(T.begin(), T.begin() + k, cmpy);
double min_d = d;
for (int i = 0; i < k - 1; i++){ // 边界是k - 1
for (int j = i + 1; j < min(i + 7, k); j++){
if (dist(T[i], T[j]) < min_d)
min_d = dist(T[i], T[j]);
}
}
return min_d;
}
double cp_merge_solution(vector<Point>& P, int low, int high)
{
// 如果自己与自己的距离最近,那直接cout << 0.0000 << endl 就结束了
if (low >= high) return (double)INT_MAX;
if (low + 1 == high) // 这两点中间没有任何点,所有直接求距离即可
return dist(P[low], P[high]);
int mid = (high + low) / 2; // 分解
// 分别获得两分区中最近点对距离,并取这两个距离之中的最小值
double d = min(cp_merge_solution(P, low, mid), cp_merge_solution(P, mid + 1, high));
return Merge(P, low, mid, high, d);
}
int main(){
int N;
scanf("%d", &N);
vector<Point> P(N);
for (int i = 0; i < N; i++)
scanf("%d%d", &P[i].x, &P[i].y);
// Divide and Merge
sort(P.begin(), P.begin() + N, cmpx);
printf("%.4lf\n", cp_merge_solution(P, 0, N - 1));
return 0;
}
ZOJ上也有一道 最近点对问题 的模板题
ZOJ2107 Quoit Design

代码
- 语言支持:c++
c++ Code:
#include<iostream>
#include<algorithm>
#include<cmath>
#include<cstdio>
#include<vector>
#include<climits>
using namespace std;
typedef struct node{
double x, y;
}Point;
vector<Point> T(100005);
double dist(Point p1, Point p2)
{
return sqrt((p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y));
}
bool cmpx(Point a, Point b)
{
if (a.x == b.x)
return a.y < b.y;
return a.x < b.x;
}
bool cmpy(Point a, Point b)
{
return a.y < b.y;
}
double Merge(vector<Point>& P, int low, int mid, int high, double d)
{
int k = 0;
for (int i = low; i <= high; i++){
if (fabs(P[mid].x - P[i].x) < d)
T[k++] = P[i];
}
// k是T的大小
sort(T.begin(), T.begin() + k, cmpy);
double min_d = d;
for (int i = 0; i < k - 1; i++){ // 边界是k - 1
for (int j = i + 1; j < min(i + 7, k); j++){
if (dist(T[i], T[j]) < min_d)
min_d = dist(T[i], T[j]);
}
}
return min_d;
}
double cp_merge_solution(vector<Point>& P, int low, int high)
{
if (low >= high) return (double)INT_MAX;
if (low + 1 == high)
return dist(P[low], P[high]);
int mid = (high + low) / 2; // 分解
double d = min(cp_merge_solution(P, low, mid), cp_merge_solution(P, mid + 1, high));
return Merge(P, low, mid, high, d);
}
int main(){
int N;
while (scanf("%d", &N) && N){
vector<Point> P(N);
for (int i = 0; i < N; i++)
scanf("%lf%lf", &P[i].x, &P[i].y);
sort(P.begin(), P.begin() + N, cmpx);
printf("%.2lf\n", cp_merge_solution(P, 0, N - 1) / 2.0);
}
return 0;
}
POJ3714 Raid

这题同样也是模板题,只有当两个点,一个是特工坐标,另一个是据点坐标才算两点距离,否则直接返回INT_MAX,很简单,但当时死活TLE…,有一些小小的细节,需要注意的点在代码中已经写了出来
代码
- 语言支持:c++
c++ Code:
#include<iostream>
#include<cstdio>
#include<algorithm>
#include<cmath>
#include<vector>
#include<climits>
using namespace std;
typedef long long ll;
struct Point{
ll x, y;
bool flag;
};
vector<Point> T(200004); // 放函数体外,否则会TLE
double dist(Point p, Point q)
{
return sqrt(1.0 * (p.x - q.x) * (p.x - q.x) + 1.0 * (p.y - q.y) * (p.y - q.y));
}
bool cmpx(Point p, Point q)
{
if (p.x == q.x)
return p.y < q.y;
return p.x < q.x;
}
bool cmpy(Point p, Point q)
{
return p.y < q.y;
}
double Merge(vector<Point>& P, int low, int high)
{
if (low >= high) return (double)INT_MAX;
if (low + 1 == high){
if (P[low].flag == P[high].flag) return (double)INT_MAX; // 判断两点是否不属于同一类
else return dist(P[low], P[high]);
}
int mid = (low + high) / 2;
double d = min(Merge(P, low, mid), Merge(P, mid + 1, high));
int cnt = 0;
for (int i = low; i <= high; i++){
if (fabs(1.0 * P[mid].x - 1.0 * P[i].x) < d){
T[cnt++] = P[i];
}
}
double min_d = d;
sort(T.begin(), T.begin() + cnt, cmpy);
for (int i = 0; i < cnt - 1; i++){ // 边界是 cnt - 1
for (int j = i + 1; j < min(i + 7, cnt); j++){
if(T[i].flag != T[j].flag && dist(T[i], T[j]) < min_d) // 判断两点是否不属于同一类
min_d = dist(T[i], T[j]);
}
}
return min_d;
}
int main(){
int T, N;
scanf("%d", &T);
while (T--){
scanf("%d", &N);
vector<Point> P(2 * N + 3);
for (int i = 0; i < N; i++){
scanf("%lld%lld", &P[i].x, &P[i].y);
}
for (int i = N; i < 2 * N; i++){
scanf("%lld%lld", &P[i].x, &P[i].y);
P[i].flag = 1;
}
sort(P.begin(), P.begin() + 2 * N, cmpx); // 这里记得是2 * N
printf("%.3lf\n", Merge(P, 0, 2 * N - 1));
}
return 0;
}
















 3109
3109











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











