







10.python-opencv边缘检测与人脸检测应用
第一章 python-opencv-图片导入和显示
第二章 python-opencv图像简单处理
第三章 python-opencv图像mask掩膜处理
第四章 python-opencv图像马赛克
第五章 python-opencv人脸马赛克
第六章 python-opencv人脸检测
第七章 python-opencv图像张贴
第八章 python-opencv轮廓绘制
第九章 python-opencv边缘检测
前言
本章主要介绍如何在人脸区域张贴图像,主要思路为:首先检测到人脸区域,对于要张贴的图像进行轮廓检测,检测到轮廓后在人脸区域绘制轮廓,并将洛阔中的图像张贴到人脸区域。
一、完整代码
import cv2
import numpy as np
if __name__ == '__main__':
# 加载图片
img = cv2.imread('./tong.jpg')
img2 = cv2.imread('./dog.png')
# 加载人脸检测器
face_detector = cv2.CascadeClassifier('./haarcascade_frontalface_alt.xml')
# 见图片转化为灰度图片
img_gray = cv2.cvtColor(img, code = cv2.COLOR_BGR2GRAY)
img2_gray = cv2.cvtColor(img2, code = cv2.COLOR_BGR2GRAY)
# 图像二值化,binary二进制图片(黑白图),其中,threshold为阀值,阀值以下变为0,阀值以上变为255
threshold, binary = cv2.threshold(img2_gray, 180, 255, cv2.THRESH_OTSU)
# 边缘检测,contours为轮廓 hierarchy为层次结构
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
areas = [] # 建立空列表记录轮廓
for contour in contours:
areas.append(cv2.contourArea(contour)) #计算轮廓面积并记录
areas = np.array(areas)
index = areas.argsort() #将面积从小到大排列,倒数第二个为内轮廓
# 创建像素值全部为0的图片
mask = np.zeros_like(img2_gray, dtype = np.uint8)
# 在mask中绘制倒数第二个轮廓(内轮廓), thicknesss为-1会将轮廓中的部分全部变成白色
mask = cv2.drawContours(mask, contours, index[-2],
(255,255,255),
thickness = -1)
faces = face_detector.detectMultiScale(img_gray) #图像img_gray检测到的人脸
for x,y,w,h in faces: #遍历检测到的人脸
mask1 = cv2.resize(mask, (w,h)) #定义一个新图片,并调整为人脸大小,用以方img2
img3 = cv2.resize(img2, (w,h)) #同样把img2调整为人脸大小
for i in range(h):
for j in range(w):
if (mask1[i,j]==255).all():
img[i+y, j+x] = img3[i,j]
cv2.imshow('face', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
二、部分代码说明
图片处理部分
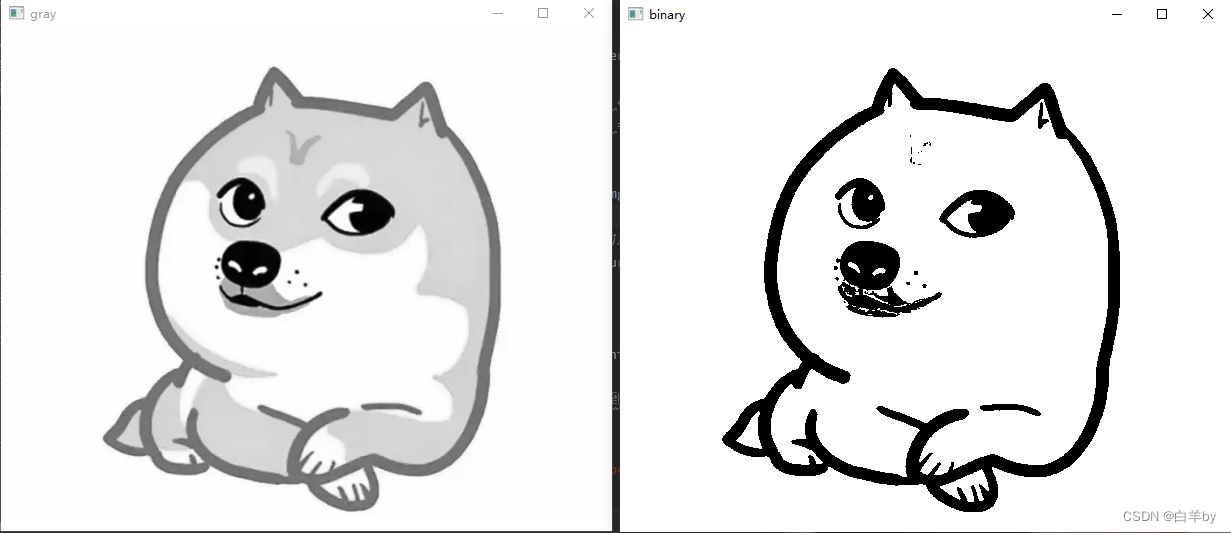
图片处理部分主要包括图片灰度处理和二值化处理,代码如下:
img2_gray = cv2.cvtColor(img2, code = cv2.COLOR_BGR2GRAY)
# 图像二值化,binary二进制图片(黑白图),其中,threshold为阀值,阀值以下变为0,阀值以上变为255
threshold, binary = cv2.threshold(img2_gray, 180, 255, cv2.THRESH_OTSU)
处理结果:
全部轮廓为:
轮廓检测部分
轮廓检测部分主要包括轮廓的检测和轮廓的提取
由于图片轮廓检测后由多个轮廓,我们选择内轮廓进行处理,如何提取到内轮廓呢?
首先将检测到的所有轮廓放入一个列表中,计算每个轮廓的面积并升序排列,那么倒数第二个即内轮廓。
代码如下:
# 边缘检测,contours为轮廓 hierarchy为层次结构
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
areas = [] # 建立空列表记录轮廓
for contour in contours:
areas.append(cv2.contourArea(contour)) #计算轮廓面积并记录
areas = np.array(areas)
index = areas.argsort() #将面积从小到大排列,倒数第二个为内轮廓
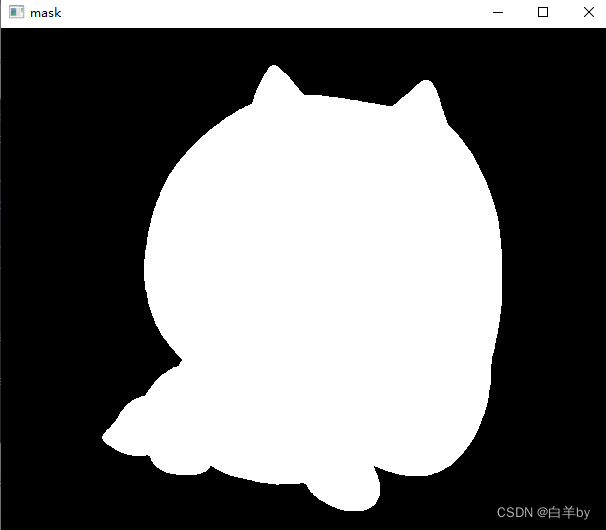
# 创建像素值全部为0的图片
mask = np.zeros_like(img2_gray, dtype = np.uint8)
# 在mask中绘制倒数第二个轮廓(内轮廓), thicknesss为-1会将轮廓中的部分全部变成白色
mask = cv2.drawContours(mask, contours, index[-2],
(255,255,255),
thickness = -1)
处理结果:
全部轮廓面积为:
导数第二个轮廓:
人脸检测及处理部分
这部分主要为检测人脸区域,并将轮廓和要张贴的图片全部变为人脸区域大小,然后根据轮廓将要张贴的图片张贴到原始图片中,主要代码:
faces = face_detector.detectMultiScale(img_gray) #图像img_gray检测到的人脸
for x,y,w,h in faces: #遍历检测到的人脸
mask1 = cv2.resize(mask, (w,h)) #定义一个新图片,并调整为人脸大小,用以方img2
img3 = cv2.resize(img2, (w,h)) #同样把img2调整为人脸大小
for i in range(h):
for j in range(w):
if (mask1[i,j]==255).all():
img[i+y, j+x] = img3[i,j]
处理结果
检测到的人脸(x,y,width,high):
结果展示
















 7713
7713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









