







在广阔的大自然中,一些最深刻的灵感来自于最小的生物。昆虫由于体型微小而经常被忽视,但它们实际上是导航和效率的奇迹。它们凭借不超过针头大小的大脑在复杂环境中机动的能力长期以来一直引起科学家和工程师的兴趣。物理学家 Elisabetta Chicca 率先揭开了这些秘密,她最近的工作弥合了生物学理解和技术创新之间的差距。
奇卡踏上了一段旅程,旨在破解这些微小生物如何取得如此非凡的成就。她的工作不仅揭示了昆虫导航的奥秘,还为节能计算和机器人技术的进步铺平了道路。
解锁昆虫导航
尽管昆虫的神经资源有限,但它们却表现出惊人的导航能力。它们毫不费力地避开障碍物并熟练地穿过最微小的缝隙,这一壮举多年来一直困扰着科学家。这种能力的关键在于他们对世界的独特感知。
奇卡在她的研究中解释说,昆虫导航的一个关键方面是它们如何感知运动。这类似于坐在火车上观察风景的体验:附近的树木似乎比远处的房屋移动得更快。昆虫利用这种不同的运动速度来测量距离和导航。这种简单而有效的方法在直线移动时效果很好。然而,现实世界很少如此简单。
昆虫通过简化行为来适应环境的复杂性。它们通常沿直线飞行,转弯,然后沿另一条直线飞行。奇卡的观察揭示了一个重要的教训:资源的限制可以通过行为调整来抵消。
从生物学见解到机器人应用的旅程是一个跨学科合作的故事。 Chicca 指导下的博士生 Thorben Schoepe 开发了一个模仿昆虫神经元活动的模型,然后将其转化为小型导航机器人。
这款机器人体现了昆虫导航原理,是与比勒费尔德大学著名神经生物学家 Martin Egelhaaf 密切合作的产物。埃格尔哈夫在理解昆虫计算原理方面的专业知识对于开发准确模拟昆虫导航策略的模型至关重要。
机器人的导航壮举
任何科学模型的真正证明在于其实际应用。在奇卡的研究中,昆虫大脑的机器人对应物在一系列复杂的测试中展示了其能力。其中最引人注目的是机器人在走廊中导航,走廊的墙壁上装饰着随机的印刷品。这种设置旨在模仿昆虫遇到的不同视觉刺激,对于任何导航系统来说都是一个具有挑战性的过程。
该机器人配备了托尔本·舍佩(Thorben Schoepe)的模型,展示了维持走廊中央路径的不可思议的能力,这种行为与昆虫的行为非常相似。这是通过转向最不明显运动的区域来实现的,模仿昆虫测量距离和方向的自然策略。机器人在这种环境中的成功是对该模型的令人信服的验证。
在走廊之外,机器人在各种虚拟环境中进行了测试,每个环境都提出了自己的一系列挑战。无论是绕过障碍物还是在狭小的开口中寻找出路,该机器人都表现出了与生物机器人相似的适应性和效率。 Chicca 的结论是,该模型在不同环境下一致执行的能力不仅体现了技术实力,而且反映了昆虫导航的基本效率和多功能性。
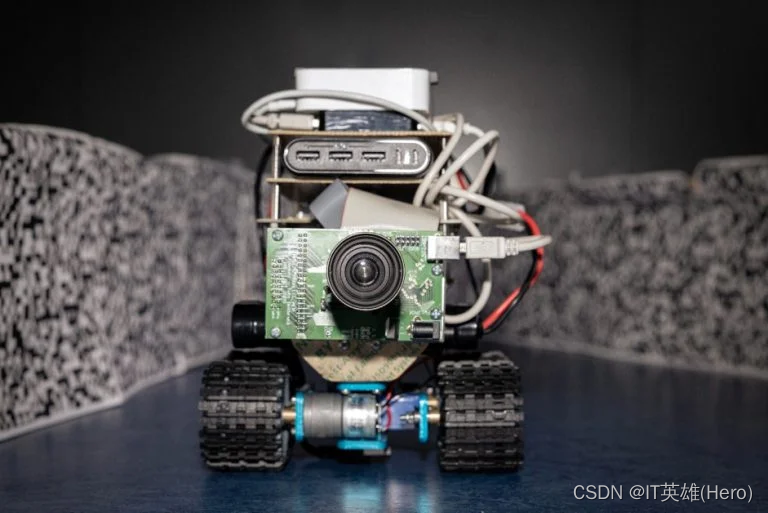
Thorben Schoepe 的机器人在走廊里,上面有随机的印刷品。照片莱奥尼·冯·里斯托克
机器人技术的效率:新范式
机器人世界长期以来一直由通过大量编程和数据处理来学习和适应的系统主导。这种方法虽然有效,但通常需要大量的计算资源和能量。 Chicca 的研究引入了范式转变,从效率至关重要的自然世界中汲取灵感。
正如 Chicca 指出的那样,昆虫生来就具有从一开始就有效导航的天生能力,无需学习或进行大量编程。这种“硬连线”效率与机器人技术的传统方法形成鲜明对比。通过模拟这些生物学原理,机器人可以达到目前传统方法无法达到的效率水平。
Chicca 设想了一个未来,机器人技术不仅涉及学习和适应,还涉及固有效率。这种方法可能会导致开发出更小、消耗更少能源并且更适合各种环境的机器人。这是一个挑战现状并为机器人系统的设计和应用开辟新可能性的观点。
在这里给大家推荐一个可以学习技能知识的网站--------
机器人学习,感兴趣的朋友可以自主学习,有任何疑问随时问我。














 315
315











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









