







 本文详细介绍了科先巴的二阶段算法,该算法用于解决魔方的复原问题。文章涵盖了算法的核心概念,包括搜索算法ID*,目标状态性质,转动表,对称变换,剪枝表的建立以及阶段一和阶段二的处理。通过坐标层次、转动、对称变换和剪枝等技术,实现了在有限步数内找到接近最优解的魔方转动序列。
本文详细介绍了科先巴的二阶段算法,该算法用于解决魔方的复原问题。文章涵盖了算法的核心概念,包括搜索算法ID*,目标状态性质,转动表,对称变换,剪枝表的建立以及阶段一和阶段二的处理。通过坐标层次、转动、对称变换和剪枝等技术,实现了在有限步数内找到接近最优解的魔方转动序列。
科先巴的二阶段算法
本文来具体介绍一种具体的魔方还原算法——科先巴的二阶段算法,有一部分相关内容在前篇讲述,主要是方向定义那一块儿,没有看的建议先看一下:
二阶段,顾名思义,解决问题分为两步,先完成一个目标,再最终复原。对于二阶段算法有一个生动的比喻,复原魔方就像是一条小船要在汪洋大海上行驶到一个固定的目的地。二阶段算法就是先让小船行驶到一个固定的特殊水域,再驶向最终的目的地,这显然比直接寻找目的地要容易简单的多。
比喻归比喻,终归抽象,我们来具体看看。
一、总述
为方便叙述,也避免搞混淆,我们定义任意打乱的魔方称为随机状态或者初始状态,处于特殊水域的那些状态称为目标状态,目的地为还原状态。
初始状态可以看作是由 U,R,F,D,L,B 这 6 个基本转动复合而成的,由这 6 个转动生成的群记为
G
=
⟨
U
,
R
,
F
,
D
,
L
,
B
⟩
G=\langle U,R,F,D,L,B \rangle
G=⟨U,R,F,D,L,B⟩。
而科先巴定义的目标状态是只由 U,D,L2,R2,F2,B2 这 6 种转动复合生成的,同样的记为
G
1
=
⟨
U
,
D
,
L
2
,
R
2
,
F
2
,
B
2
⟩
G_1=\langle U,D,L2,R2,F2,B2 \rangle
G1=⟨U,D,L2,R2,F2,B2⟩。
Ⅰ 目标状态性质
还记得上篇文章计算状态数时是怎么定义方向的么?再来复习复习重新看看:
-
棱边有 2 种状态,未翻转(flip)用 0 表示,翻转用 1 表示, 只有
F,B层的转动能够改变方向。 -
角块有 3 种状态,未扭转(twist)用 0 表示,顺时针扭转用 1 表示,逆时针扭转用 2 表示,只有
U,D层转动不改变角块方向。
目标状态由 U,D,L2,R2,F2,B2 这 6 种转动生成,而这 6 种转动不会引起角块和棱块方向的变化。因为不论怎么转动,角块拥有的 U 层面或 D 层面始终处于 U 层或者 D 层,所以方向不变。也不会引起棱块方向变化,因为只有 F,B 的转动会引起棱块方向的变化,而像 F2 这样的连续转动两次,翻转再反转棱块相当于未翻转,所以棱块的方向也是不会变化的。这 6 种转动也不会将中层块带到 U 层或者 D 层,所以处于中层的块只能处于中层。
因此目标状态的性质总结如下:
- 棱块角块方向不变,即各自的方向值总和都为 0。
- 还原状态下的中层块处于中层
Ⅱ 搜索算法
科先巴的二阶段算法使用的搜索算法是 IDA* 算法,也就是迭代加深搜索算法,而且两个阶段使用的都是 IDA* 算法。
关于IDA*,还有个 A*算法大家可能不太熟悉,也没什么神秘的,简单说说。A* 就是具有启发函数的广搜。IDA*就是有搜索深度限制,有启发函数的深搜。点到为止,详细的解释请百度 CSDN。
一般的,广搜是能够找到最短路径的,深搜不能,IDA*虽然使用的是深搜,但是它有深度限制,也是能够找到最短路径。比如说我搜索深度定为 1 ,没搜到,再定为 2 重新搜索,依次下去,就能够得到最短路径。
所以两个阶段都是能够得到相应的最短路径,能够使用最少的步数达到每个阶段的目标,但合起来会是最优解吗?
答案是否定的,因为阶段二得到的最优解是相对于阶段一来说的,举个例子
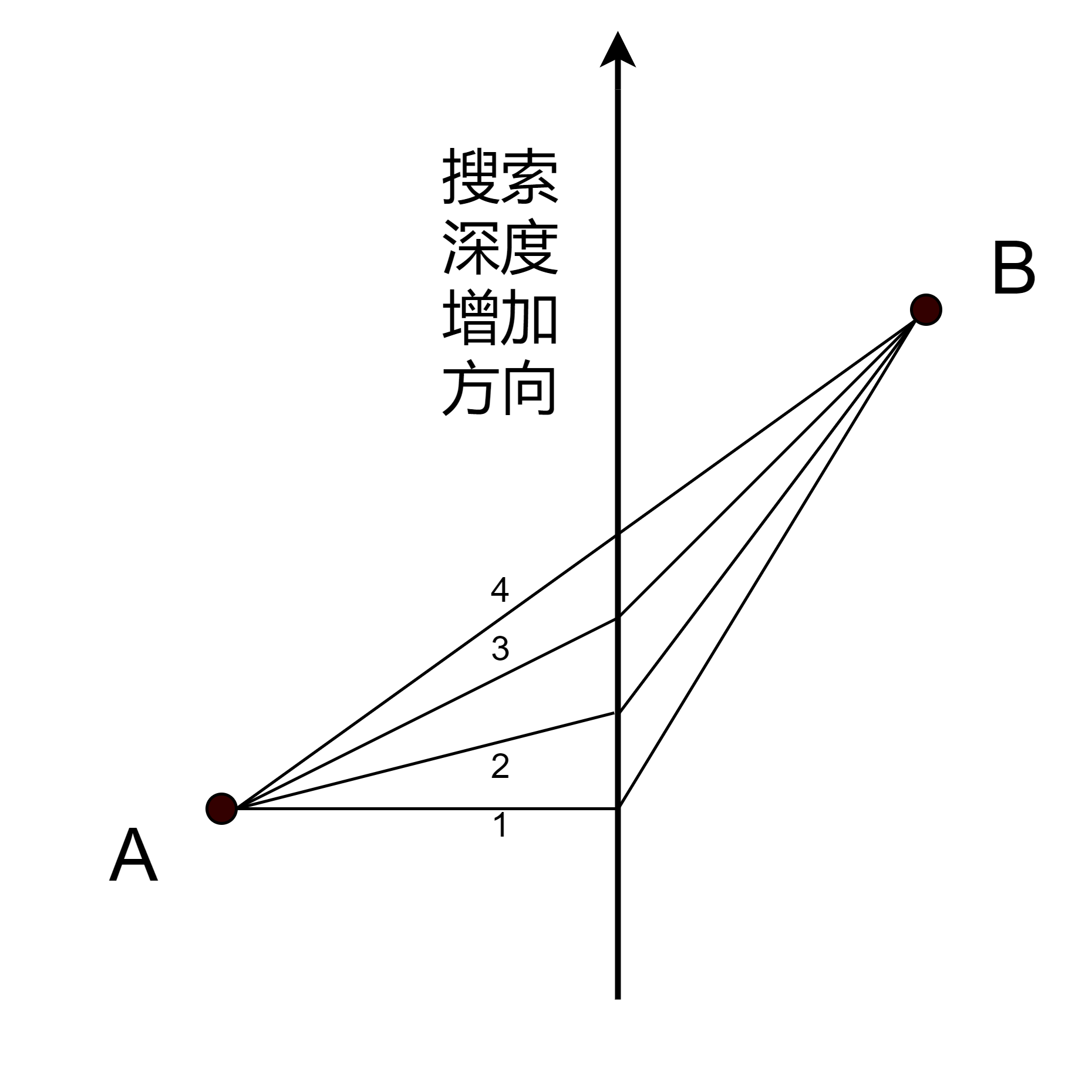
两个阶段都相应最优就好比上述方法 1 得到的距离,但两个阶段合起来明显不是最短距离,两点之间线段最短应该是方法 4。
那怎么解决呢,如何得到更优甚至最优的解法?也如上图所示,我们加深第一阶段的搜索深度,虽然第一阶段的路径变长了,但是第二阶段可能找到更短路径,这样它们合起来边可能更优。这样一步步下去,是总能找到最优解的,也就是说科先巴的二阶段算法一次搜索可能得不到最优解,但是只要给它时间,是一定能够找到最优解的。但是对于科先巴算法并不是拿来寻找最优解的,目的是短时间内找到一组比较优的解。
对于科先巴的二阶段算法应该有了很直观的基本认识了吧,如果还不清楚,再针对魔友举一个很形象的例子。咱们一般使用的 CFOP 还原公式,F2L 之后就应该是 OLL,PLL 的对吧,如果我们正常的按照 CFOP 的公式来,这几个阶段都得到的是最优解,合起来的话也是比较优的。但是如果我们在 F2L 时多花几步,是可能跳 O 甚至跳 P 的,这就会节省很多后续转动步骤,得到一个更优的解法。
上述有关两点之间线段最短的例子只是比喻,实际情况稍微有点不一样,前面说过二阶段算法就是小船先驶向一片特殊水域,再驶向目的地,但是某些情况的最短路径可能根本就不经过那片水域,如果还是先经过特殊水域的话,自然也就得不到最优解。那这是不是就与上述所讲的冲突呢?也不然,还原状态其实也是目标状态之一是吧,所以如果解决阶段一之后发现已经还原了,阶段二所需要的步骤降为 0 ,那这就是最优解。就好比完成 F2L 之后惊奇的发现跳 O 又 条 P 已经还原了。
好了,上述就是对科先巴的二阶段算法的一个总述,应该是很容易理解的。下面是算法细节,挺多,感兴趣的朋友可以看看,对魔方没什么兴趣的了解到这一步大概就够了。
不过学计算机的,关于魔方的还原算法还是很值得一看的。不知道大家有没有做过八数码的题,解魔方与解八数码本质上是一样的,英文也都用 puzzle 这个词来表示,只不过魔方的状态数比八数码要大得多,而且魔方方方正正的,有许多特殊的性质可以利用来优化算法,下面来具体看看:
二、定义魔方
Ⅰ 块层次
定义魔方,首先就得对角块,棱块这些基本元素标号,可按如下方式这样标号:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-O3jSeDeq-1627530609241)(https://cdn.jsdelivr.net/gh/Rand312/Rand_Picture_01@main/Magic_Cube_Pic/块的标号.6knwqhq4v2w0.png)]
代码表示如下:
typedef enum {URF,UFL,ULB,UBR,DFR,DLF,DBL,DRB} Corner;
typedef enum {UR,UF,UL,UB,DR,DF,DL,DB,FR,FL,BL,BR} Edge;
对角边进行标号了之后就可以从块这个角度来定义一个魔方:
struct corner_o
{ Corner c; //角块
char o; //方向
};
struct edge_o
{ Edge e; //棱块,也就是边
char o; //棱块方向
};
struct CubieCube //一个魔方状态
{
struct corner_o co[8]; //8个棱块
struct edge_o eo[12]; //12个角块
};
怎么存储的魔方状态?举个例子 c o [ U R F ] = { U R F , 0 } co[URF] = \{URF,0\} co[URF]={URF,0} 表示 URF 这个位置存储的 URF 这个块,方向为 0。 c o [ U R F ] = { U F L , 1 } co[URF] = \{UFL,1\} co[URF]={UFL,1} 表示 URF 这个位置存储的 UFL 这个块,方向为0 。
棱块同理,而在篇一就说过,我们不用考虑中心块,中心块保持不动,当做参考系。如此就可以用上述的 CubieCube 结构体来表示一个魔方状态,定义一个魔方。
Ⅱ 坐标层次(索引)
这名字是从英文名中直译过来的,这一层次简单来说就是我们要对魔方状态进行编码/哈希,给不同状态分配一个唯一数来标识,主要用来作为变换表,剪枝表的索引。当然不可能真的对魔方不同的完整状态进行编码,这状态数太多了,不现实。而是对魔方的部分状态编码,一个魔方的完整状态有 8 个角块,12 个棱块以及它们的方向组成,而算法就是将它们分割,比如某些棱块的位置,角块位置,角块方向,棱块方向等等,对它们进行编码哈希,这样数量就会小上很多。
因此主要是对于位置,方向两个指标编码,而编码方法主要用到以下三种:
① 方向
方向分为角块方向和棱块的方向,两者类似,在这儿以角块方向举例,假如有如下所示的一个带方向的角块排列:

第一行表示位置,第二行表示该位置上存储的角块和其方向,使用下面的方法进行编码:
2 × 3 6 + 0 × 3 5 + 0 × 3 4 + 1 × 3 3 + 1 × 3 2 + 0 × 3 1 + 0 × 3 0 2\times3^6+0\times3^5+0\times3^4+1\times3^3+1\times3^2+0\times3^1+0\times3^0 2×36+0×35+0×34+1×33+1×32+0×31+0×30
应该很直观也很好理解吧,因为当 7 个角块方向确定之后,最后一个角块的方向也就确定了,所以不用编码最后一个角块的方向。代码如下:
short int idx_co = 0; //corner orientation index,角块方向编码
for (Corner c = URF; c < DRB; c++)
idx_co = 3 * idx_co + co[c].o;
② 排列
对于位置变化常使用排列数,期间我们可能会用到多种排列,比如 8 个角块的排列,6 条边的排列等等,这些都是魔方部分状态的表示,我们需要进行编码,有关排列的编码方法有个名字叫做康托展开,同样直接来看一个例子来说明康托展开这种编码方式,假如 8 个角块有如下排列:

第一行表示位置,第二行表示对应位置上放的角块,由标号知道咱们的块是有大小之分的: U R F < U F L < U L B < U B R < D F R < D L F < D B L < D R B URF<UFL<ULB<UBR<DFR<DLF<DBL<DRB URF<UFL<ULB<UBR<DFR<DLF<DBL<DRB 所以第三行就表示位于左边的块比自己大的块有几个,比如说 URF 块(看第二行,第一行表示位置,第二行才是该位置上存放的块)左边有 3 个块,都比自己大,所以第三行值为 3;再比如 UBR 块,左边有 7 个块,比自己大的有 4 个,所以值为 4 。DFR 块处于第一个位置,左边没有块了,所以编码时第一个块不用考虑进去。
具体的编码:
1 × 1 ! + 1 × 2 ! + 3 × 3 ! + 0 × 4 ! + 1 × 5 ! + 1 × 6 ! + 4 × 7 ! 1\times1!+1\times2!+3\times3!+0\times4!+1\times5!+1\times6!+4\times7! 1×1!+1×2!+3×3!+0×4!+1×5!+1×6!+4×7!
这个式子与上面第三行一一对应起来应该很好理解就不解释了,代码描述如下:
int idx_cp = 0; //corner position index 角块位置编码
for (int i = DRB; i > URF; i--){
int s = 0;
for (int j = i - 1; i >= DRF; j--)
if(co[j] > co[i]) s++;
idx_cp = (idx_cp + s) * i;
}
③ 组合
对于位置变化有时也会用到组合数,需要对组合数进行编码,在阶段一我们会用到关于中间层 4 个棱块的一个组合数编码,阶段一的目标状态要求本来在中间层的棱块要处在中间层,所以算阶段一的棱块位置状态我们只用考虑中间层的 4 个棱块,有 12 × 11 × 10 × 9 = 11880 12\times11\times10\times9 = 11880 12×11×10×9=11880 种状态,但是中间层的 4 个棱块之间并无位置要求,所以还要除以它们自身的位置排列 4 ! = 24 4!=24 4!=24 ,总共 495 种状态,而这就是一个组合数 C 12 4 C^4_{12} C124 ,我们要对这 495 种状态编码:

第一行表示位置,第二行表示存储的块,只用考虑中间层 4 个块的位置也就是 F R F L B L B R FR\ FL\ BL\ BR FR FL BL BR 4 个棱块, 因为中间层的 4 个棱块无位置要求,所以用 X 代替,表明它们是相同的。第三行表示 X 对应的组合数是多少,以第二个举例说明怎么编码:
C 11 4 + C 10 3 + C 9 2 + C 8 1 C_{11}^4+C_{10}^3+C_9^2+C_8^1 C114+C103+C92+C81
上述编码方式应该很容易看懂吧,按顺序来就行了,来看码:
int idx_slice = 0, x = 0 //中间层 4 个棱块状态的编码
for(int i = BR; i >= UR; i--) //从后往前
if(edge[i] >= FR && edge[i] <= BR) //判断是否是中间层 4 条棱边
idx_slice += c_nk(11 - j, x + 1) //c_nk为,n选k的组合数值
x += 1 //x加1,x就是上图括号里面第二个值
直接用到了组合数的值,所以要提前写一个求组合数的函数,n 选 k,如果 k > n k>n k>n 规定等于 0,写函数时判断以下即可。上述编码也可以对另外的 8 个组合数和来表示,感兴趣的可以自己试试。
上述是编码过程,魔方的坐标层次表示,也就是将魔方的部分状态转变成一个特定的数来表示,编码方式不唯一,合理即可。我们还应需要一个逆过程,从编码到实际的魔方状态,这样才能实现上述两种层次的定义相互转化,这里不再赘述了,基本上就是完全反着来一遍。
三、定义转动
Ⅰ 位置变化
先来看篇一提到的 { 0 , 1 , 2 , 3 } \{0,1,2,3\} {0,1,2,3} 的排列问题,假如有两个排列,在程序中用数组如下表示:
int a[4] = {0, 1, 2, 3};
int b[4] = {1, 2, 3, 0};
int c[4] = {};
数组这个数据结构有两要素,一个是下标表示位置,一个是元素,都是同等重要的,但往往我们可能会忽略掉下标的作用。
b 这个数组表示什么?当然可以表示一个排列,0号位存的 1,1号位存的2 ,2号位存的3,3号位存的0。
这只是常规认识,还表示什么?本身就可以表示一个变换,它表示 0 号位的元素被 1 号位元素替代,1 号位的元素被 2 号位元素替代,2 号位的元素被 3 号位元素替代,3 号位的元素被 0 号位元素替代。使用这种替代的角度来描述变换有很直观的等式关系,比如,0 号位的元素被 1 号位的元素替代,可以写成 a [ 0 ] = a [ 1 ] a[0]=a[1] a[0]=a[1] 。
所以给定一个排列,它不仅是排列,还可以看作是一个变换,这是因为排列本身就存在次序,从数组的角度来就是有个隐含的下标来表示元素所处的位置,通过一个元素前后次序的变化就可以说明一个变换操作。
特别的如果元素个数也就是下标取值范围等于元素的取值范围,我们就可以很方便的在其上定义封闭的变换。比如说上述的排列元素个数为 4,所以下标的取值范围为 0~3,而元素本身的取值也是 0~3 这 4 个数。这种情况就很方便定义变化操作,比如在 a 这个排列上做 b变换,得到的结果存在排列 c 里面,进行如下操作:
for(int i = 0; i < 4; i++)
c[i] = a[b[i]];
总结下来就是如果给定一个排列,如果要把它当作是一个变换的话,那么不仅下标表示的是位置,它的元素也表示的是位置。如 b[2] = 3就表示位置 2 的元素被位置 3 的元素替代。
理解了上面之后,魔方转动的定义也就迎刃而解了,并不需要什么新的数据结构,前一节定义的魔方状态就可以一个变换,只不过在不同需求时我们对其解读不同罢了。
Ⅱ 方向变化
一个位置存储的不仅有块本身,还有块的方向,块可以按照上述替代的角度来看,但方向不行。
举个例子,在 a 状态下做 F 操作,前面说过转动操作也可以看作一个状态,我们把 F 操作记为 b ,得到的结果记为 ab,以 URF 这个位置为例来说明。
F 转动使得 URF 槽的元素被 UFL 槽的元素替代,可以写成
a b . c o [ U R F ] . c = a . c o [ U F L ] . c = a . c o [ F ( U R F ) ] . c = a . c o [ b . c o [ U R F ] ] . c ab.co[URF].c = a.co[UFL].c = a.co[F(URF)].c = a.co[b.co[URF]].c ab.co[URF].c=a.co[UFL].c=a.co[F(URF)].c=a.co[b.co[URF]].c
但是方向的取值不能用替代来表示,也就是说 a b . c o [ U R F ] . o ≠ a . c o [ U F L ] . o ab.co[URF].o \neq a.co[UFL].o ab.co[URF].o=a.co[UFL].o ,F 转动下,UFL 位置上的元素移动到 URF 位置上,并顺时针扭转,所以对于 F 转动,方向应有以下变化:
a b . c o [ U R F ] . o = ( a . c o [ U F L ] . o + 1 ) m o d 3 = ( a . c o [ U F L ] . o + b . c o [ U R F ] . o ) m o d 3 = ( a . c o [ b . c o [ U R F ] ] . o + b . c o [ U R F ] . o ) m o d 3 ab.co[URF].o = (a.co[UFL].o + 1)\ mod \ 3 = (a.co[UFL].o + b.co[URF].o)\ mod \ 3=(a.co[b.co[URF]].o + b.co[URF].o)\ mod \ 3 ab.co[URF].o=(a.co[UFL].o+1) mod 3=(a.co[UFL].o+b.co[URF].o) mod 3=(a.co[b.co[URF]].o+b.co[URF].o) mod 3
方向这里有点绕,可以实际找个魔方转一转模拟一下,物理实体上应该是很好理解的,主要是要用程序语言来表述的确是有一点绕。
Ⅲ 基本转动
因此我们应该能很容易的写出基本转动的定义,来看个例子 F :
const cubieCube basicMoveF = {{{UFL,1}, //URF槽的元素被UFL槽的元素替代,且顺时针扭转,方向加1
{DLF,2},{ULB,0},{UBR,0},{URF,2},{DFR,1},{DBL,0},{DRB,0}},
{{UR,0},{FL,1},{UL,0},{UB,0},{DR,0},{FR,1},
{DL,0},{DB,0},{UF,1},{DF,1},{BL,0},{BR,0}}};
Ⅳ 转动函数
转动分为角块转动和棱块转动,所以代码如下:
CubieCube cubeMove(CubieCube cc, int m){ //cc 上应用转动m
CubieCube ccRet;
cornerMultiply(&cc, &basicMove[m], &ccRet); //basicMove是基本转动数组,元素如上小节的基本转动
edgeMultiply(&cc, &basicMove[m], &ccRet);
return ccRet;
};
这个函数就是角块转动和棱块转动函数的封装,以角块的转动函数为例说明:
void cornerMultiply(const CubieCube *a, const CubieCube *b, CubieCube *ab){
for (Corner crn = URF; crn <= DRB; crn++){
ab->co[crn].c = a->co[b->co[crn].c].c; //角块
ab->co[crn].o = (a->co[b->co[crn].c].o + b->co[crn].o) % 3 //角块方向
/*********************/
}
}
与科先巴的源程序不太一样,原程序还处理了镜像等情况,这里先不管,后面再说。上面讲述的角度是将 a 看作魔方的一个状态,b 看作是一个变换,但同样也可以将 a 看作是一个变换,那么 ab 就相当于一个复合操作,一样的道理,只是理解角度不同而已。
Ⅴ 转动表
转动在程序里面会经常用,每次都去做一遍变换操作太费时间,我们要建立转动表,只要在第一次运行程序时建立好这个表,以后的转动操作直接去查表就行了。
转动表有很多,取决于使用了哪些坐标来表示魔方状态,以角块方向为例:
unsigned short int twistMove[Ntwist][Nmove]; //Ntwist=3^7-1, Nmove=18
这里就用上了魔方状态定义的坐标层次,把它当作索引。举个例子说明上面二维数组的意思,假如有 t w i s t M o v e [ a ] [ U ] = b twistMove[a][U] = b twistMove[a][U]=b,说明状态 a 下,进行 U 操作,得到状态 b。a, b 是两个数,分别唯一标识着魔方的角块方向状态。
这个二维数组初始化也很容易,直接看码:
void initTwistMoveTable(){ //初始化角块方向转动表
CubieCube a, b;
int i,j,m;
for (int i = 0;i < NTWIST; i++){ //枚举方向状态
CubieCube a = twist2cube(i); //坐标层次->块层次
for (int j = U; j <= B; j++){ //6种基本转动
for(int k = 0; k < 3; k++){ //基本转动的3种方向,如U,U2,U',分别对应90°,180°,270°
cornerMultiply(&a, &basicCubeMove[j], &b);
twistMoveTable[i][j * 3 + k] = get_twist(b); //变化后的状态从块层次->坐标层次
}
cornerMultiply(&a, &basicCubeMove[j], &b); //再转一次,返回原状态
}
}
}
四、对称
魔方是一个高度对称的物体,我们可以利用对称性来减少时间空间上的开销。
对称的形式有 4 种基本情况,原本状态,只颜色变化,只位置变化,镜像。
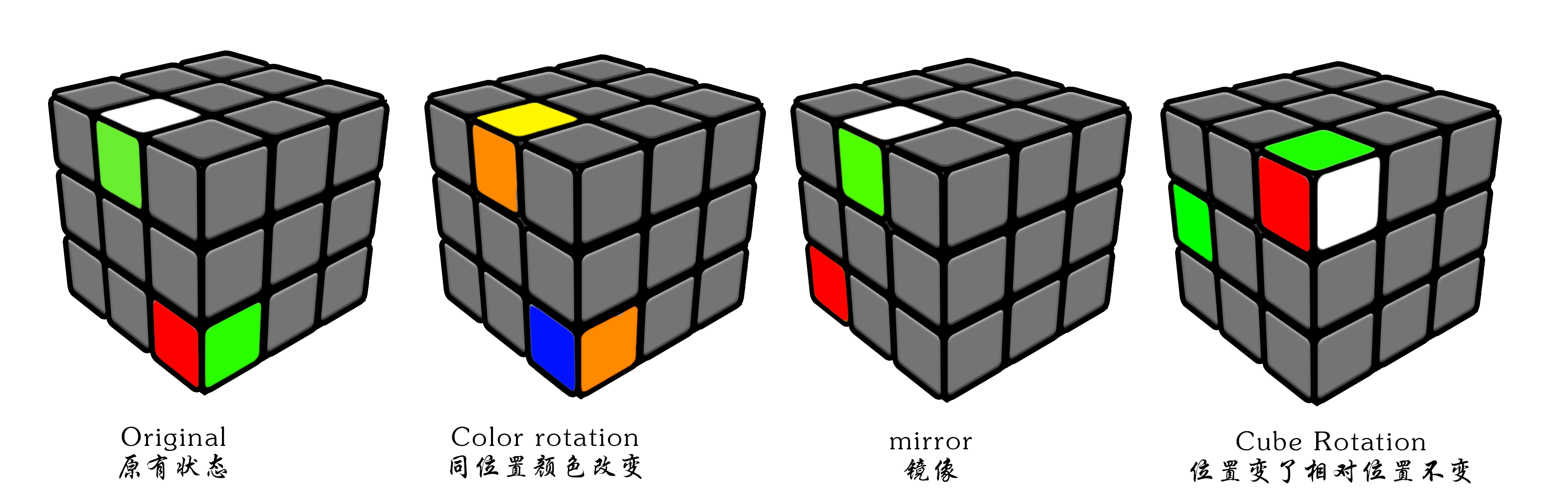
它们都是等价的,如果我们能解决其中一个,就能解决其他的,只要在解法上加上相应的对称变化即可。
来看一个同位置不同颜色的例子,看看原状态经过怎样的变化后得到的一种等价状态:
假如对还原状态的魔方进行 A(一个转动序列) 操作得到如下状态:
我们要得到它的一个等价状态,进行如下操作,还原状态先绕 UD 轴逆时针转动 90°,再做 A 操作,最后绕 UD 轴顺时针转动 90°。

看到这大家有没有联想到什么,是不是很像矩阵的相似变换,有一些还原算法就是把魔方存成矩阵的形式,魔方变换就是相应的矩阵变换,道理都是相通的。
Ⅰ 对称变换
① 基本变换
上述的一些等价形式都是通过对称变换得来的,对于每个状态加上自己有 48 种变换形式,一般来说每个状态也就有 48 种等价形式,它们都是由 4 种“基本对称”组合而成:
- S_U4:围绕 UD 这个轴转动 90°,4 种
- S_F2:围绕 FD 这个轴转动 180°,2 种
- S_URF3:围绕 URF 这个角块转动120°,3 种
- S_LR2:关于 LR 层的镜像,2 种
合起来 4 × 2 × 3 × 2 = 48 4\times2\times3\times2=48 4×2×3×2=48 种
具体怎么转动的我就不具体画图表示了(唉主要是变换的 3D 制图太难了,尝试了一下,效果不好,见谅),既然是变换操作,所以对称变换还是可以用状态的块层次来表示,具体来看 4 种基本对称变换的定义,从块的替代关系中应该就能理解具体是怎么变换的了。
const CubieCube basicSymCube[4] =
{
{{{URF,1},{DFR,2},{DLF,1},{UFL,2},{UBR,2},{DRB,1},{DBL,2},{ULB,1}},
{{UF,1},{FR,0},{DF,1},{FL,0},{UB,1},{BR,0},
{DB,1},{BL,0},{UR,1},{DR,1},{DL,1},{UL,1}}},//S_URF3
{{{DLF,0},{DFR,0},{DRB,0},{DBL,0},{UFL,0},{URF,0},{UBR,0},{ULB,0}},
{{DL,0},{DF,0},{DR,0},{DB,0},{UL,0},{UF,0},
{UR,0},{UB,0},{FL,0},{FR,0},{BR,0},{BL,0}}},//S_F2
{{{UBR,0},{URF,0},{UFL,0},{ULB,0},{DRB,0},{DFR,0},{DLF,0},{DBL,0}},
{{UB,0},{UR,0},{UF,0},{UL,0},{DB,0},{DR,0},
{DF,0},{DL,0},{BR,1},{FR,1},{FL,1},{BL,1}}},//S_U4
{{{UFL,3},{URF,3},{UBR,3},{ULB,3},{DLF,3},{DFR,3},{DRB,3},{DBL,3}},
{{UL,0},{UF,0},{UR,0},{UB,0},{DL,0},{DF,0},
{DR,0},{DB,0},{FL,0},{FR,0},{BR,0},{BL,0}}} //S_LR2
};
48 种对称变换操作初始化也很容易,4 个 for 循环,调用 multiply 函数进行复合操作,得到的结果填到 symCube[48] 数组里面去,这里就不赘述重复操作了。
注意上面的镜像变换,定义角块方向变化全部加 3 ,也就是说镜像的角块方向取值为 [ 3 , 5 ] [3,5] [3,5] 。
② 逆变换
上述为了得到等价状态做了两次对称变换,两种变换互为逆过程,群论里面叫做互为逆元,我们这需要为每一个对称变换找到它们对应的逆变换。
那怎么得到相应的逆变换?在群论里面互逆的两个元素复合操作等于幺元,也就是相当于乘法里面的互为倒数的两个数相乘为 1,而在魔方里面还原状态就是幺元就是那个 1 。所以我们只要对 48 个变换进行两两复合操作,看结果是否达到还原状态即可。
init inv_idx[48] -1; //初始化为-1,表示每种对称变换的逆变换
for(i = 0; i < 48; i++){
for(j = 0; j < 48; j++){
CubieCube cc = multiply(symCube[i], symCube[j]); //两种变换相乘
if (cc == identity) //如果结果等于幺元还原状态
inv_idx[i] = j; //填数组,对称变换i的逆变换是j
}
}
Ⅱ 等价
对于上述的 48 种对称变换操作我们记为 S [ 48 ] S[48] S[48] ,也就是数组 symCube[48],假如有 A,B 两个状态,如果存在 A = S [ i ] B S [ i ] − 1 A=S[i]BS[i]^{-1} A=S[i]BS[i]−1 ,也就是 S [ i ] − 1 A S [ i ] = B S[i]^{-1}AS[i]=B S[i]−1AS[i]=B ,我们则认为 A,B 是等价的。这种写法是不是就跟矩阵的相似变换一模一样了,本质上都是相通的,所以真的要学好数学啊。
既然是等价的,那么我们就可以把这些等价的状态集合在一起,也就是说我们对于状态进行了类似下面的分类:
KaTeX parse error: Unknown column alignment: 1 at position 15: \begin{array}{1̲} 0&A0&A1&A2&..…
因此对于每种状态我们只需要记录属于哪一个集合(行号),所使用的对称变换(列号) ,这么一个集合我们称为等价类。如此一来就可以省下很多空间和时间,因为存的信息少了,搜索的状态空间也少了。在科先巴的二阶段算法里,保持了 UD 轴不动,所以只用到了 16 种对称变换。
加入一个状态属于等价类 y ,使用的对称变换为 i,那么我么就可以用新坐标 y × 16 + i y\times16 + i y×16+i 来描述原状态。但是并不是每个等价类里面都有不同的 16 种状态,也就是说不是每个状态都有 16 种不同对称状态。比如说有等价类 y 和对称变换 i,j, y × 16 + i y\times16+i y×16+i 与 y × 16 + j y\times16+j y×16+j 是有可能描述的同一个状态的。
关键问题在于我们如何得知一个坐标它属于哪一个等价类,使用的是哪一个对称变换?直接来看伪码分析:
init idx2class[Nindex] -1 //初始化为-1,idx属于哪一个等价类
init idx2sym[Nindex] -1 //初始化为-1,idx使用的哪一种对称变换
init class2rep[NCLASS] -1 //初始化为-1,该等价类的代表
classidx = 0; //等价类标号
CubieCube cc = get_cube(); //获取魔方初始状态的块层次表示
for(idx = 0; idx < Nindex; i++){ //魔方部分状态的坐标层次表示,比如说角块方向Nindex = Ntwist = 2187
if(idx2class[idx] == -1){ //还没填充
idx2class[idx] = classidx; //填
idx2sym[idx] = 0; //等价类里面的第一个元素,使用的对称变换为第一种0
class2rep[classidx] = idx; //等价类里面的代表,idx最小的那个作为代表
}
else
continue; //已填,跳过
/**上面是处理等价类中的第一个元素,这里直接应用16种对称变换来处理其他元素**/
for(sym = 0; sym < 16; sym++){
idx_new = idxSymTable[idx][sym]; //对称变换表,在idx上应用对称变换sym得到新坐标idx_new
if(idx2class[idx_new] == -1){
idx2class[idx_new] = classidx;
idx2sym[idx_new] = sym;
}
}
classidx++; //填完当前等价类,加一准备填下一个
}
Ⅲ 对称变换表
上述的代码里面已经使用过了,类似前面的转动表,对称变换,转动都是变换操作,转动有转动表,对称变换也得有相应的变换表。比如定义以下的表:
int moveSymTable[NMOVE][16]; //对每一种转动m做 S[i]*m*S[i]^-1
int twistSymTable[NTWIST][16]; //对角块方向twist做 S[i]*twist*S[i]^-1
具体的初始化操作同转动表,都是建立在状态的复合操作之上,以角块方向的对称变换表举例说明:
void initTwistConjugate(){
CubieCube cc,ccSym,ccTmp;
int i,j;
for (int i = 0;i < NTWIST; i++){
cc = twist2cube(i); //坐标层次转块边层次
for (int j = 0;j < 16; j++){
cornerMultiply(&symCube[i], &cc, &ccTmp); //S[i]*cc
cornerMultiply(&ccTmp, &symCube[inv_idx[i]], &ccSym); //S[i]*cc*S[i]^-1
twistSymTable[i][j] = get_twist(ccSym); //结果转为坐标层次
}
}
}
源程序里面命名用的是 conjugate 这个词,共轭,我这儿直接用的 Sym 来说明,私以为可能更直观一些。
五、剪枝
剪枝,应该是科先巴的二阶段算法的核心了,综合运用了前面定义的所有数据结构来构建一个新的查找表——剪枝表,表里面存放的信息是距离目标状态(阶段一)或者还原状态(阶段二)最少还需要多少步。如果这个步数大于了还能走的步数,剪掉回溯。
两个阶段的剪枝表可能有多张,每个阶段都要选取最大的那个数作为到目标/还原状态的最少需要步数,比如说表一告诉我当前状态至少还需要 5 步到达目标状态,表二告诉我至少还需要 6 步,则将 6 作为至少需要步数。还是很好理解的是吧,表一表二分别描述了魔方的一部分状态,每部分状态都达到目标状态才算达到目标状态,所以要选取最大的。这也是 IDA 算法里面的 h ( n ) h(n) h(n) 这个函数*。
Ⅰ 建立剪枝表
剪枝表竟然能够出到目标状态的最少步数?是不是很神奇,其实没什么神奇之处,就是一个暴力广搜得到的结果。设定目标状态的深度为 0 ,然后对目标状态进行 18 种转动操作,得到第一层的状态结点深度为 1,再对第一层的每种状态转动,得到第二层状态结点,深度为2…具体看下面伪码:
init pruneTable1[Nindex] -1 //初始化所有元素为 -1
depth = 0 //初始深度为 0
pruneTable[0] = 0; //本就是目标状态,所以深度/所需步数为0
done = 1; //已填了一个初始状态
while done < Nindex: //表还没填完
for i = 0 to Nindex - 1
if pruneTable[i] == depth
for each m in Nmove //对每个状态进行18种转动操作
index = moveTable[i][m] //根据转动表得出转动后的状态坐标值
if pruneTable[index] != -1 //如果还没填表,填
pruneTable[index] = depth + 1 //深度加 1,表下一层
done++
depth++ //填完一层结点,深度加 1
本质上就是广搜,只是形式上与我们平常看到的框架可能不太一样,这种形式费点时但省空间不用像常见广搜框架那样储存节点,魔方的状态数很多,我么要采用更省空间的形式。
Ⅱ 存储技巧
如果知道初始状态距离目标状态有多远,而后每执行一步,距离目标状态要么要么加 1,要么不变,要么减 1,就这三种情况,那么我们就能够计算出转动后的状态距离目标状态多远。所以其实剪枝表里面我们只需要 2个 bit 来存储 实际距离 mod 3 的值。根据当前状态的距离,再根据剪枝表里面查到的 mod3 值就能够算出转动后的状态到目标状态的距离的。如此就大大减少了空间的使用。
但关键在于初始状态到目标状态距离有多远?你可能会说,查表嘛,查表没错,但是要记住,现在剪枝表里面存放的不是实际距离了,存放的是只用了 2 bits 的 mod3 距离。那怎么办呢?我们直接看伪码分析解决办法:
int get_depth_phase1(CubieCube cc){
index = get_index(cc); //得到初始状态的坐标值
depth_mod3 = pruneTable[index]; //初始状态到目标状态的mod3距离
depth = 0; //初始化0
while index != SOLVED: //若没到目标状态,循环
if(depth_mod3 == 0) depth_mod3 = 3; //mod3为0,表3倍数,设为3
for each m in Nmove //对于每个转动
index_new = moveTable[index][m];
if (pruneTable[index1] == depth_mod3 - 1) //如果转动后距离更近
depth++; //实际距离加 1
index = index1; //更新坐标索引值
depth_mod3--; //mod3距离减 1
break; //找到一个举例目标转动更近的转动,跳出循环
return depth;
}
根据伪码应该能看出大概意思吧,因为我们从剪枝表里面查出来的是 mod3 距离,所以 mod3 距离从 3 到 0 一直循环的递减,实际距离从 0 开始一直递增,直到到达目标状态。因为我们每次更新两个距离值都是要转动后距离目标状态更近,所以最终得出的实际距离 depth 一定是初始状态到目标状态需要的最少步骤。这似乎都已经把魔方解了一遍了,但其实并不是,因为 index 只是魔方部分状态的坐标索引,所以这个函数算出来的值只是当作一个初始指标。
六、阶段一
Ⅰ 所用坐标
阶段一用了三个坐标:
twist,角块方向,取值范围 [ 0 , 2186 ] [0,2186] [0,2186]flip,棱边方向,取值范围 [ 0 , 2047 ] [0,2047] [0,2047]slice,中间层的 4 条棱边的选取状态,取值范围 [ 0 , 494 ] [0,494] [0,494]
前两个不说了,很熟了,第三个在坐标层次那一块儿也说过了。想想第一阶段目标状态的性质,前两个坐标就是来解决方向问题的。第一阶段的目标状态对块边的位置要求不高,只要求属于中层的块要在中层呆着,而且都不要求要在家里呆着,只要在中层就好,第三个坐标就是来解决位置问题。
Ⅱ 坐标优化
但其实科先巴做了优化,并未实际定义 slice 而是 slice_sorted 这个坐标,这个坐标就是 slice 的加强版,slice 不考虑中间层 4 条棱边的位置吗,假如要考虑,那就是 slice_sorted,取值范围 [ 0 , 11879 ] [0,11879] [0,11879] 。但当然实际用的时候用的还是用的 slice,slice 才是我们阶段一的指标,也就是说把 slice_sorted 除以 24 再用。为啥这么麻烦,不直接定义 slice ?因为阶段二也要用到这个 slice_sorted 这个坐标,为了方便统一所以这样处理吧,但当然,只要你自己清楚不混淆,不管使用那种,甚至使用其他坐标都行。
这个坐标既不是组合数又不是排列数,怎么编码?虽然这个坐标两不是却两相像, 12 × 11 × 10 × 9 = A 12 12 C 12 4 12\times11\times10\times9=\frac{A^{12}_{12}}{C^4_{12}} 12×11×10×9=C124A1212 ,所以这个坐标也可以由排列组合的编码方式来表示。
Ⅲ 坐标合并/索引计算
flip 和 slice 组合成了一个坐标,flipslice, f l i p s l i c e = 2048 × s l i c e + f l i p flipslice=2048 \times slice + flip flipslice=2048×slice+flip ,取值范围 [ 0 , ( 2048 × 495 − 1 ) ] [0,(2048\times495-1)] [0,(2048×495−1)] 。
但是由于对称性质,flipslice 可以由 classidx 和 sym 替代,取值范围分别为 [ 0 , 64429 ] [0, 64429] [0,64429] , [ 0 , 15 ] [0,15] [0,15]。 64430 × 16 > 2048 × 495 64430\times16 > 2048 \times 495 64430×16>2048×495 ,这儿就体现了不是每个等价类里面都有 16 种不同的对称状态存在。
classidx, sym 再和 twist 组合成一个坐标,暂且叫做 sym_flipslice_twist,取值范围 [ 0 , 64430 × 2187 − 1 ] [0,64430\times2187-1] [0,64430×2187−1] 这个坐标就是阶段一剪枝表的索引。
s
y
m
_
f
l
i
p
s
l
i
c
e
_
t
w
i
s
t
=
2187
×
c
l
a
s
s
i
d
x
+
t
w
i
s
t
S
y
m
T
a
b
l
e
[
t
w
i
s
t
]
[
s
y
m
]
sym\_flipslice\_twist = 2187\times classidx + twistSymTable[twist][sym]
sym_flipslice_twist=2187×classidx+twistSymTable[twist][sym]
为什么要这么计算?没有为什么,科先巴这么算的,也可以不这么算,它就是一个索引值,哈希值,只要能够一一区分开就行。
Ⅳ 搜索算法
前面已经说过搜索算法用的是 IDA*,不多说,直接看伪码:
main: //主线程
CubieCube cc = get_cube(); //得到输入的魔方
dist = get_depth_phase1(cc); //获取阶段1需要的最少步数
twist = get_twist(cc); //获取坐标twist
flip = get_flip(cc); //获取坐标flip
slice_sorted = get_slice_sorted(cc); //获取坐标slice_sorted
for(togo1 = dist; togo1 <= 20; i++) //IDA* 限制搜索深度体现点,深度不能超过togo1
search1(twist, flip, slice_sorted, dist, togo1); //阶段一搜索
void search1(twist, flip, slice_sorted, dist, togo1){ //深搜
if(togo1 == 0) //阶段一已解决
/**省略后面讲,大概就是满足一定条件后search2()**/
else{
for each permitted m in MOVE{ //对每个允许的转动
flip_new = flipMoveTable[flip][m]; //获取新flip
twist_new = twistMoveTable[twist][m]; //获取新twist
slice_sorted_new = sliceSortedMoveTable[slice_sorted][m]; //获取新slice_sorted
flipslice = 2048 * slice_sorted_new / 24 + flip_new; //计算flipslice,slice_sorted除以24再用
classidx = flipslice2class[flipslice]; //flipslice属于哪个等价类
sym = flipslice2sym[flipslice]; //记录使用的哪种对称变换
sym_flipslice_twist = 2187 * classidx + twistSymTable[twist][sym]; //计算索引
dist_new_mod3 = get_flipslice_twist_depth3(sym_flipslice_twist); //查阶段一剪枝表,获取mod3距离
dist_new = get_real_dist(dist_new_mod3); //mod3距离转实际距离
if (dist_new > togo1) //最少需要步数大于允许步数,剪枝
continue;
maneuver1.append(m); //做选择,m加进解法的转动序列
search1(twist_new, flip_new, slice_new, dist_new, togo1 - 1); //下一层搜索
maneuver1.pop(); //撤销选择,尝试兄弟结点或回溯
}
}
}
七、阶段二
Ⅰ 所用坐标
corners,角块排列,8个,取值范围 [ 0 , 40319 ] [0,40319] [0,40319]ud_edges,U层D层的棱边排列,8个,取值范围 [ 0 , 40319 ] [0,40319] [0,40319]slice_sorted,中层的棱边排列,4个,取值范围 [ 0 , 23 ] [0,23] [0,23]
现在已经处于阶段一的目标状态,所有棱块棱边的方向都是好的,我们只需要解决它们的位置问题,所以这 3 个坐标都是排列数,按照排列数编码建立坐标即可。
Ⅱ 坐标合并/计算索引
coners,取值范围 [ 0 , 40319 ] [0, 40319] [0,40319] ,由于对称性,可以由 classidx 和 sym 替代,取值范围分别为 [ 0 , 2767 ] [0, 2767] [0,2767], [ 0 , 15 ] [0,15] [0,15] ,2768 个等价类,同样的因为不是每个等价类里面都有 16 种不同的状态,所以 2768 × 16 > 40320 2768\times16>40320 2768×16>40320
classidx, sym, ud_edges 组合成一个坐标,暂且称为 sym_corners_ud_edges,取值范围
[
0
,
40320
×
2768
−
1
]
[0,40320\times2768-1]
[0,40320×2768−1]这个坐标就是阶段二剪枝表的索引。
s
y
m
_
c
o
r
n
e
r
s
_
u
d
_
e
d
g
e
s
=
40320
×
c
l
a
s
s
i
d
x
+
u
d
_
e
d
g
e
s
S
y
m
T
a
b
l
e
[
u
d
_
e
d
g
e
s
]
[
s
y
m
]
sym\_corners\_ud\_edges = 40320\times classidx + ud\_edgesSymTable[ud\_edges][sym]
sym_corners_ud_edges=40320×classidx+ud_edgesSymTable[ud_edges][sym]
corners,slice_sorted 组合成另一个坐标,暂且称为 corners_slice_sorted,取值范围
[
0
,
40320
×
24
−
1
]
[0,40320\times24-1]
[0,40320×24−1] ,这个坐标是阶段二另一个剪枝表的索引。
c
o
r
n
e
r
s
_
s
l
i
c
e
_
s
o
r
t
e
d
=
24
×
c
o
r
n
e
r
s
+
s
l
i
c
e
_
s
o
r
t
e
d
corners\_slice\_sorted = 24\times corners+slice\_sorted
corners_slice_sorted=24×corners+slice_sorted
Ⅲ 搜索算法
void search2(corners, ud_edges, slice_sorted, dist, togo2){ //深搜框架
if(togo2 == 0) //阶段二已解决
maneuver = maneuver1 + maneuver2; //合并两阶段的解法
if(len(maneuver) < shortest)
shortest = len(maneuver) //记录最短解法的长度
else{
for each permitted m in MOVE{ //对每个允许的转动
corners_new = cornersMoveTable[corners][m]; //获取转动后的corners
ud_edges_new = ud_edgesMoveTable[ud_edges][m]; //获取转动后的ud_edges
slice_sorted_new = sliceSortedMoveTable[slice_sorted][m]; //获取转动后的slice_sorted
classidx = corner2classidx[corners_new]; //获取corners的代表
sym = corner2sym[corners_new]; //获取使用的对称变换
sym_corners_ud_edges = 40320 * classidx + ud_edgesSymTable[ud_edges][sym]; //计算索引
corners_slice_sorted = 24 * corners + slice_sorted; //计算索引
dist_new_mod3 = get_corners_ud_edges_depth3(sym_flipslice_twist); //查剪枝表,获取转动后的mod3距离
dist_new = get_real_dist(dist_new_mod3); //mod3距离转成实际距离
another_dist = corners_slice_sorted_pruneTable[corners_slice_sorted] //查另一个剪枝表,查表,获取距离
if(max(dist_new, another_dist) >= togo2) //两个距离指标,如果最大的那个大于允许的步数,剪枝
continue;
maneuver.append(m); //做选择,m加进阶段二的解法
seach2(corners_new, ud_edges_new, slice2_new, dist_new, togo2 - 1); //搜索下层结点
maneuver.pop(); //撤销选择,尝试兄弟结点或回溯
}
}
}
八、完善补充
科先巴的二阶段算法已经从头至尾的梳理了一遍,现在来看看其中省略或简单略过的部分
Ⅰ 完善阶段一
void search1(twist, flip, slice, dist, togo1){ //深搜
if(togo1 == 0){ //阶段一已解决
/***计算阶段二需要的参数***/
corners = get_corners(cc); //获取初始状态的corners坐标
for m in maneuver1 //根据阶段一的解法,转动更新corners
corners = cornersMoveTable[corners][m];
//计算阶段二最多允许的步数,目前的最优解法的长度减去当前阶段一已花的步数,且阶段二用的步数不能超过11-1=10步
//阶段二的步数下降的很快,通常不超过9步
togo2_limit = min(shortest - len(maneuver1), 10);
corners_slice_sorted = 24 * corners + slice_sorted; //计算索引
if(corner_slice_sorted_pruneTable[corners_slice_sorted] >= togo2_limit) //查表剪枝
return
ud_edges = get_ud_edges(cc); //获取初始状态的ud_edges坐标
for m in maneuver1 //根据阶段一的解法,转动更新ud_edges
ud_edges = ud_edgesMoveTable[ud_edges][m];
dist2 = get_depth_phase2(corners, ud_edges);
for(togo2 = dist2; togo2 <= togo2_limit; togo2++) //限制步数的深搜,IDA*
search2(corners, ud_edges, slice, dist2, togo2)
}
Ⅱ 允许的转动
前面很多代码中都写道所有 18 中转动操作中允许的转动,什么意思呢?还是用例子来说明,比如我这一步采用 L ,则下一次转动就不该使用 { L , L 2 , L 3 } \{L, L2,L3\} {L,L2,L3} ,因为采用的话,总有更短的转动序列可以替代,比如说 L L = L 2 , L L 2 = L 3 , L L 3 = 0 , L 2 L 3 = L LL = L2,\ LL2 = L3,\ LL3 = 0,\ L2L3=L LL=L2, LL2=L3, LL3=0, L2L3=L 。所以 { L , L 2 , L 3 } \{L, L2,L3\} {L,L2,L3} 后面不应使用 { L , L 2 , L 3 } \{L, L2,L3\} {L,L2,L3} 。
魔方转动一般步满足交换律的,比如 F R ≠ R F FR\neq RF FR=RF ,但是相对的两层转动是满足交换律的,比如 L R = R L LR=RL LR=RL ,所以如果 L 类转动后面可以跟 R 类转动,那么就要禁止 R 类的转动后面跟 L 类的转动。
另外每个阶段都有限制的转动,特别是在阶段二,只能使用 { U , D , L 2 , R 2 , F 2 , B 2 } \{U,D,L2,R2,F2,B2\} {U,D,L2,R2,F2,B2}
而在阶段一中,如果 d i s t = 0 A N D t o g o 1 ≠ 0 dist = 0 \ \ AND \ \ togo1 \neq 0 dist=0 AND togo1=0 ,说明是要在阶段一种寻找次优解,以达到总体更优解。这时,即使处于阶段一,但我们禁止使用 { U 1 , U 2 , U 3 , D 1 , D 2 , D 3 , L 2 , R 2 , F 2 , B 2 } \{U1,U2,U3,D1,D2,D3,L2,R2,F2,B2\} {U1,U2,U3,D1,D2,D3,L2,R2,F2,B2} ,这是阶段二使用的转动,但是我们禁止使用。为什么呢?比如一个转动序列 M 可以让初始状态到达目标状态,那么 MU,MR2 等转动序列也能使初始状态到达目标状态,但是这种阶段一的次优解并不能让我们找到更优解。
Ⅲ 状态/变换的逆元
实在不知道去什么名字好,干脆就用数学里面的术语,前面我们求过对称变换的逆变换,这里我们要求一个魔方状态逆元或者说一个普通变换的逆变换。这里的实现方式不同于对称变换那里两两验证,直接来看码:
CubieCube inverse_cubiecube(CubieCube cc){
CubieCube inv;
for (Edge edg = UR;edg <= BR; edg++) //棱边位置
inv.eo[cc.eo[edg].e].e = edg;
for (Edge edg = UR;edg <= BR; edg++) //棱边方向
inv.eo[edg].o = cc.eo[inv.eo[edg].e].o;
for (Corner crn = URF;crn <= DRB; crn++) //角块位置
inv.co[cc.co[crn].c].c = crn;
for (Corner crn = URF; crn <= DRB;crn++) //角块方向
inv.co[crn].o = (3 - cc.co[ccInv.co[crn].c].o) % 3 //角块方向要发生变化
}
里面的点点有一点点多,不要绕晕了,模拟一下怎么变化的应该很好理解。说一下为什么棱边的方向没有变化,而角块的方向要变化。究其原因与角块有 3 个方向和对块边的定义有关,对于角块如果我们只从扭转与未扭转的角度来看,角块方向也是没有发生变化的,可以简单代几个数试一试,最后一个式子作用只是让 1 变 2,2 变 1,0 还是 0。如果还是不太清楚可以对一个魔方分别做相逆操作,然后根据方向定义来观察一下块边的方向如何变化的。
Ⅳ 复合变换/转动时角块方向问题
由于加入了镜像变换,对角块的方向进行了重新定义,镜像的方向取值范围为 [ 3 , 5 ] [3,5] [3,5] 。这里顺时针扭转变为 5 ,逆时针扭转变为 4 ,这里我看国内国外有关资料都没有指出来,而根据实际代码操作,魔方转动模拟出来的结果应该是这样。
corner_multiply 函数是来处理变换时角块的位置和方向变化的函数,上述我们只处理了普通状态,加入镜像后会有一些变动,这里完善,还是直接来看码:
void cornerMultiply(const CubieCube *a, const CubieCube *b, CubieCube *ab){
for (Corner crn = URF; crn <= DRB; crn++){
ab->co[crn].c = a->co[b->co[crn].c].c; //角块位置变化
char oriA = a->co[b->co[crn].c].o; //原本方向
char oriB = b->co[crn].o); //方向怎么变化
/***根据普通还是镜像分别讨论***/
if (oriA < 3 && oriB < 3){ //a, b都处于普通状态
ori = oriA + oriB;
if (ori >= 3) ori -= 3; //结果普通状态
}else if (oriA < 3 && oriB >= 3){ //b处于镜像状态
ori = oriA + oriB;
if (ori >= 6) ori-=3; //结果镜像状态
}else if (oriA >= 3 && oriB < 3){ //a处于镜像状态
ori = oriA - oriB;
if (ori < 3) ori += 3; //结果镜像状态
}else if (oriA >= 3 && oriB >= 3){ //a,b都处于镜像状态
ori = oriA - oriB;
if (ori < 0) ori += 3; //结果普通状态
}
}
}
镜像状态做普通变换,普通状态下做镜像变换,结果为镜像状态,镜像状态下做镜像变化相当于有变回去了所以结果为普通状态,应该很好理解。
主要是上述对于不同情况下 oriA,oriB 的加减操作和最后结果的 ori 加 3 还是 减 3 可能很迷惑,嘿,很迷惑但我不细说,主要是因为关于这个方向的问题实在是不太好表述,要想搞清楚最好的方法就是根据简单的镜像变换,普通变换模拟一下,然后拿一个实物魔方作为参考,看看是不是这样。要详说模拟操作的话内容大多就是离散里面置换操作,重复且枯燥,所以不说了,感兴趣的自己去模拟一下吧。
Ⅴ 多线程多方向搜索提高效率
可以使用多线程并行搜索,并行搜索不是对同一个方向同一种情况多次搜索,而是搜索不同的方向。比如搜索另外的轴向,搜索逆反状态。搜索另外轴向意思就是在搜索之前先对魔方进行 S_URF3 对称变换(不一定是绕 URF3 角转动,其他也行),同理搜索逆反状态呢就是先对魔方进行逆变换。
记住初始使用的什么变换,搜索结束后得到的解法再做逆变换即可得到原本状态的解法。实验证明,开 6 个线程,三个轴向和逆变换的不同组合效率是最高的。
九、结尾参考
科先巴的二阶段算法大概就是这样,基本上囊括了所有的重难点吧。纵观下来,算法核心在于各种数据结构的构建,要创建各种各样的表,特别是剪枝表的建立,直接影响到搜索性能和解法优劣。
本文参考的外文资料,感兴趣的可以去看看原版资料
http://kociemba.org/cube.htm,科先巴的个人网站,详细的讲述二阶段算法,里面也有程序和源码,看源码的建议看 python 版本的,各个部分都十分清晰明了。
https://www.jaapsch.net/puzzles/,国外一大神的网站,里面有各种魔方的理论,程序源码。
http://www.cube20.org,宣布上帝之数是 20 的一个网站,下面也有一个关于二阶段算法的源码和相应的 pdf 讲解,看完理解透应该就成神了,我是坚持看完之后差点没背过去,感兴趣想变强的可以试试。
https://en.wikipedia.org/wiki/Optimal_solutions_for_Rubik’s_Cube,Wiki百科
https://www.speedsolving.com/wiki/index.php/Kociemba’s_Algorithm,Wiki百科
https://ruwix.com/the-rubiks-cube 也是很不错的一个网站,里面有各种理论也有在线的程序等等很全
The Diameter of the Rubik’s Cube Group Is Twenty,魔方领域影响力最大的一篇论文,得出结论上帝之数为 20,值得一看。
还有一些就不举出来了,上面的都是个人认为比较好的一些网站资源,想看原版的理论详解可以去看看,都是英文的,国内在这方的资料文献的确太少太少了,几乎没有,在下不才,也希望尽一点绵薄之力,同样的有什么错误还请批评指正。有些网站还有资源是需要梯子的,没有的朋友可以在后台回复魔方,我把上述的一些资料源码还有程序放在里面的,方便下载。
本文关于科先巴的二阶段算法就到这里了,科先巴算法一般是得不到最优解的,有没有什么算法能够每次都得到最优解呢,答案是有的,就是篇一的时候也提到过的上帝算法——Krof’s 算法,也没什么神秘的,是基于科先巴的二阶段算法实现的,理解了二阶段算法,应该就很好理解,咱们下篇再详细叙述。
最后再谈一点题外话,对于二阶段算法有感而发吧,其实这二阶段算法不仅才计算机领域魔方领域能给我们带来启发,平时生活学习也有帮助,那句话怎么说来着,先定个小目标,一步步解决。还记得文章封面,关于二阶段算法的那个生动比喻吗?漫无目的航行想要彼岸那是遥遥无期,不如先到特定水域完成一个个目标,最终成功到达彼岸。虽然可能得不到最优解,但人生这条路谁又能够一帆风顺的走直线呢?只要刻苦努力奋斗,争取人生每个阶段都得到相应的最优解,合起来得到一个较优解那也是很不错的嘛对吧。


















 174
174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









