






基于深度学习路径规划RRT*-训练图像预处理
图像预处理说明
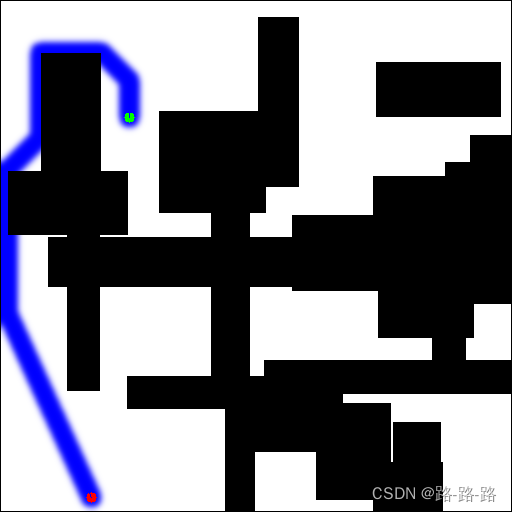
在基于采样的RRT算法对机器人进行路径规划时,由于采样点的随机性,会增加路径的搜索时间的路径的非最优性,所以基于神经网络的优势,利用深度学习进行RRT的随机采样,做一下记录。
预处理
在生成路径地图的过程中,训练数据需要原始数据和标签数据,而标签数据由于地图的特殊性,会缺失很多图片,导致原始数据和标签数据存在差异,所以写了一个。py,将原始数据和标签数据能对的上。
在.py中使用了pathlib和os模块进行实现
代码
from pathlib import Path
import os
BASE_PATH = Path(f'E:/')
path2 = []
path3 = []
path4 = []
def get_blank_maps_list() -> list:
maps_list = [str(image_path) for image_path in sorted((BASE_PATH / 'paths_with_points').iterdir())]
return maps_list
def get_blank_maps_list1() -> list:
maps_list = [str(image_path) for image_path in sorted((BASE_PATH / 'start_finish_visualized').iterdir())]
return maps_list
path = sorted(get_blank_maps_list())
path1 = sorted(get_blank_maps_list1())
for i in path:
i = i.split("\\")
path2.append(i[2])
for i in path1:
i = i.split("\\")
path3.append(i[2])
for i in path3:
if i not in path2:
path4.append(i)
for i in path4:
img = os.path.join("E:/start_finish_visualized/", i)
if os.path.exists(img):
os.remove(img)
else:
print("The file does not exist")

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









