







 超级会员免费看
超级会员免费看
 本文详细介绍了如何在FTM模式下开启和操作WLAN,包括使用MyFTM工具进行测试,列举了WLAN FTM的新命令、速率索引以及命令示例,为WLAN FTM模式的实践提供了清晰的指导。
本文详细介绍了如何在FTM模式下开启和操作WLAN,包括使用MyFTM工具进行测试,列举了WLAN FTM的新命令、速率索引以及命令示例,为WLAN FTM模式的实践提供了清晰的指导。
本博客主要介绍了在FTM模式下使能WLAN功能的操作步骤,并列出了新增命令和示例,并提供了MyFTM命令的使用示例。
4.1 打开 WLAN 在 FTM mode
执行如下命令:
adb root && adb wait-for-devices
adb shell insmod /vendor/lib/modules/qca_cld3_wlan.ko
adb shell ifconfig wlan0 up
adb shell “echo 5 > /sys/module/wlan/parameters/con_mode”
adb shell ftmdaemon -n -dd
4.2 MyFTM
MyFTM是一个命令行工具,用于执行WLAN FTM测试。
以下是该支持TLV2.0消息格式的命令:
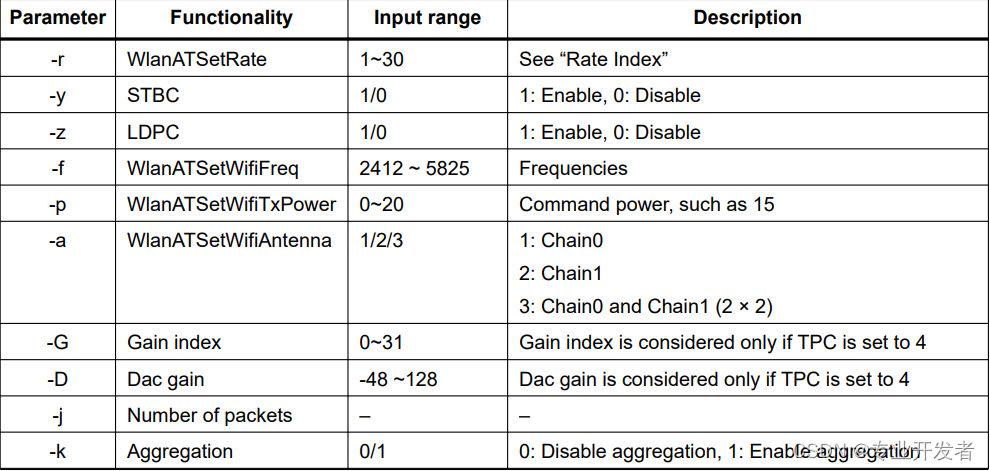
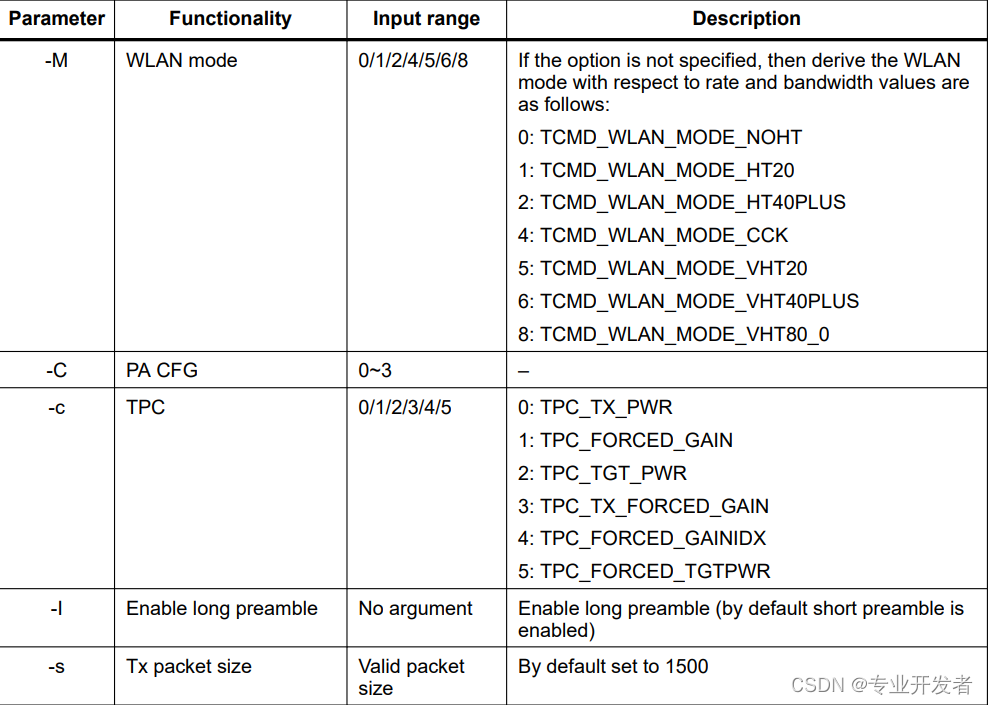
4.2.1 WLAN FTM 新的命令

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 725
725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











