图的定义:由有限顶点集
V
V
V和有限边集
E
E
E组成,记为
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)其中顶点数
∣
V
∣
|V|
∣V∣记为
n
n
n,边数
∣
E
∣
|E|
∣E∣记为
e
e
e。🍗
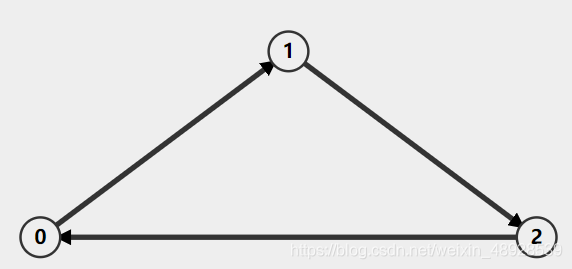
有向图:
<
v
,
w
>
∈
E
<v,w>\in E
<v,w>∈E表示由顶点
v
v
v指向顶点
w
w
w的有向边(弧),如图🍞
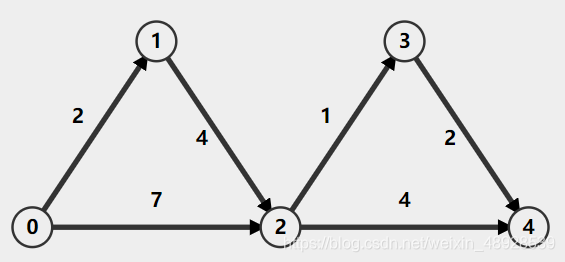
无权:
带权:🍰
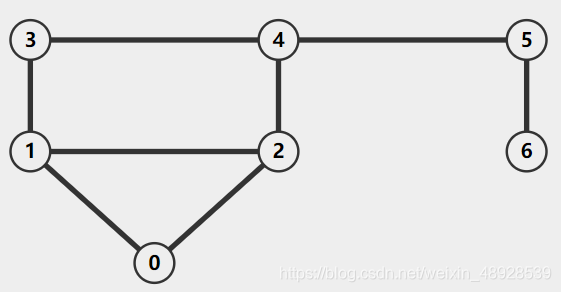
无向图:
(
v
,
w
)
∈
E
(v,w)\in E
(v,w)∈E表示由顶点
v
v
v指向顶点
w
w
w的无向边(边),如图
无权:🍨
带权
二、图的部分术语
子图:对于两个图
G
=
(
V
,
E
)
,
G
′
=
(
V
′
,
E
′
)
G=(V,E),G^{'}=(V^{'},E^{'})
G=(V,E),G′=(V′,E′),如果
V
′
∈
V
,
E
′
∈
E
V^{'}\in V,E^{'}\in E
V′∈V,E′∈E,则称
G
′
G^{'}
G′为
G
G
G的子图。
完全图:包含所有可能的边的图称为完全图,无向完全图有
n
(
n
−
1
)
/
2
n(n-1)/2
n(n−1)/2条边,有向完全图有
n
(
n
−
1
)
n(n-1)
n(n−1)条弧。🍯
邻接顶点:在无向图中,若存在边
(
v
,
w
)
(v,w)
(v,w),则称
v
,
w
v,w
v,w互为邻接顶点;在有向图中,若存在弧
<
v
,
w
>
<v,w>
<v,w>,则称
w
w
w为
v
v
v的邻接顶点,反之不然。
























 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









