






Boxcar· 平均功能
模拟 Boxcar 平均(有时称为门控积分)是一种技术,工程师和科学家使用了 50 多年来减少信号上不需要的噪声。最近,随着快速高分辨率数字化仪技术的发展,数字 Boxcar 平均已被用于获得相同类型的产品中。此外,数字 Boxcar 平均带来了额外的好处,它可以提高数字化仪的整体分辨率及其动态性能。本文展示了如何使用数字 Boxcar 平均来降低信号噪声,包括在单次采集中的应用。它还解释了该函数如何提高数字化仪的分辨率和动态特性,例如有效位数 (ENOB)、信噪比 (SNR) 和无杂散动态范围 (SFDR)。
数字 Boxcar 平均适用于数字化仪以远高于待分析信号的最大频率的速率对波形进行采样的情况,该过程通常称为“过采样”。当对信号或波形进行过采样时,可以使用 Boxcar 平均功能来利用过采样数据点中可用的信息。该方法采用数学过程有效地对选定数量的相邻点(Boxcar 中的点或 Boxcar 平均因子)求和,然后计算平均垂直值(求和结果除以 Boxcar 中的点数),再使用平均值替换原始 Boxcar 数据中的所有点, 产生的操作类似于对原始数字化数据应用平滑函数,但与平滑不同的是,最终结果是数据点减少的波形。

图 1. Spectrum M4i.4451-x8 PCIe 数字化仪卡具有四个通道,每个通道具有 500 MS/s 采样率和 14 位分辨率。
为了让用户能够利用 Boxcar 平均功能,虹科Spectrum创建了一个新的固件包,可以使用其高分辨率 44xx 系列、14 位和 16 位、PCIe、PXIe 和 LXI 数字转换器的板载 FPGA 技术执行例程。图 1 显示了用于所有测试的 PCIe 数字化仪 M4i.4451-x8 示例。Boxcar Average 封装增强了这些产品的高性能,并产生了垂直分辨率更高、灵敏度更高和动态性能更高的结果。Boxcar Averaging 固件作为标准包含在所有新的 44xx 系列数字化仪中,也可以改装到已在现场使用的现有单元。
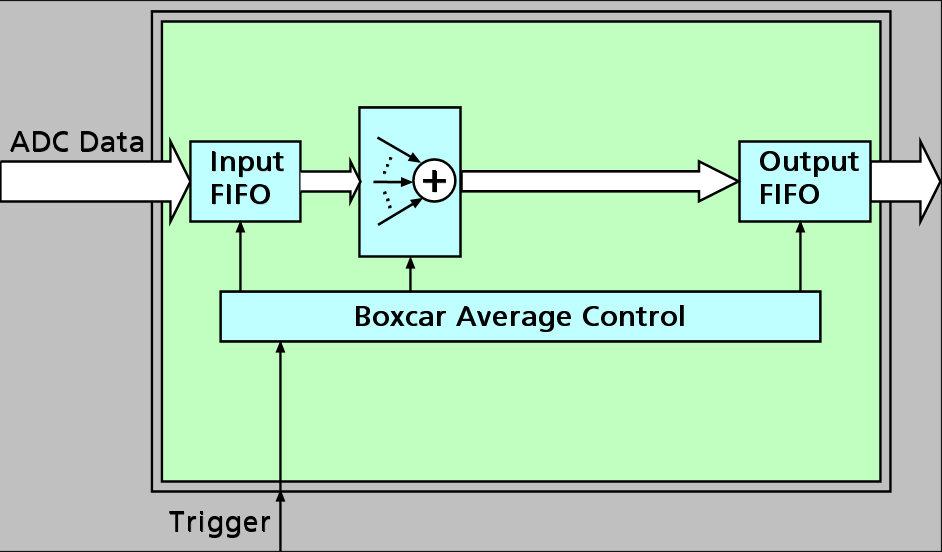
图 2. FPGA 固件用于执行 Boxcar 平均,其中原始数据中的相邻点 (Boxcar) 在处理后的数据存储在数字化仪的板载内存中或直接传输到 PC 之前进行求和和平均。
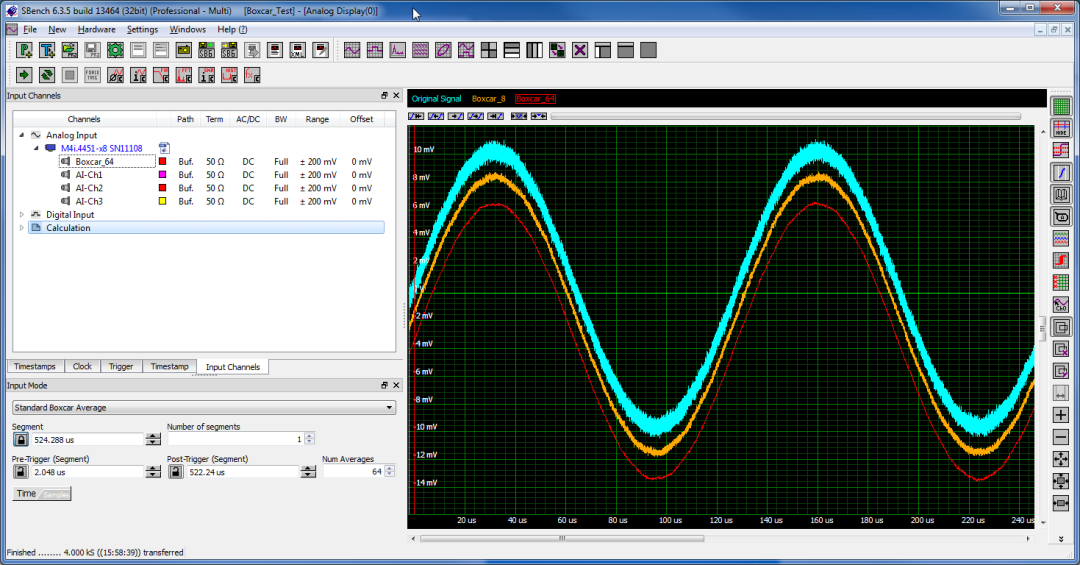
图 3. 带噪声的正弦波(顶部迹线)使用 Boxcar 平均固件(中间和下方迹线)进行处理,降低了噪声并显着提高了整体 SNR。
02.BOXCAR 平均 · 如何工作
如上所述,Boxcar Averaging 过程类似于平滑操作。在其最简单的应用中,该函数可用于通过充当低通滤波器并从信号中去除高频噪声分量来减少不需要的噪声。
例如,考虑图 3 中所示的波形。顶部迹线(蓝色)显示相对较慢的正弦波,噪声水平很高。使用虹科 M4i.4451-x8 数字转换器(图 1)采集波形并对其进行过采样,分辨率为 14 位,单次采样率为 500 MS/s。蓝色迹线显示原始数据。中间轨迹(橙色)和下方轨迹(红色)显示分别使用 8 个和 64 个相邻点将 Boxcar 平均函数应用于原始数据的效果。两条平均迹线都显示出明显较低的噪声水平。
03.改进的分辨率和动态性能
为了实现最大的灵活性,虹科 Boxcar 平均功能允许用户在 2 到 256 之间选择要平均的相邻点数。平均数据随后以与所选点数成比例的数量以更高分辨率存储。例如,选择两个相邻点会将 16 位数字转换器的分辨率提高到相当于 17 位,选择四个相邻点相当于 18 位,而选择最多 256 个点将产生理论上的 24 位!实际上,真实信号从未真正实现过如此高性能。但是,我们可以进行实质性的测量改进。
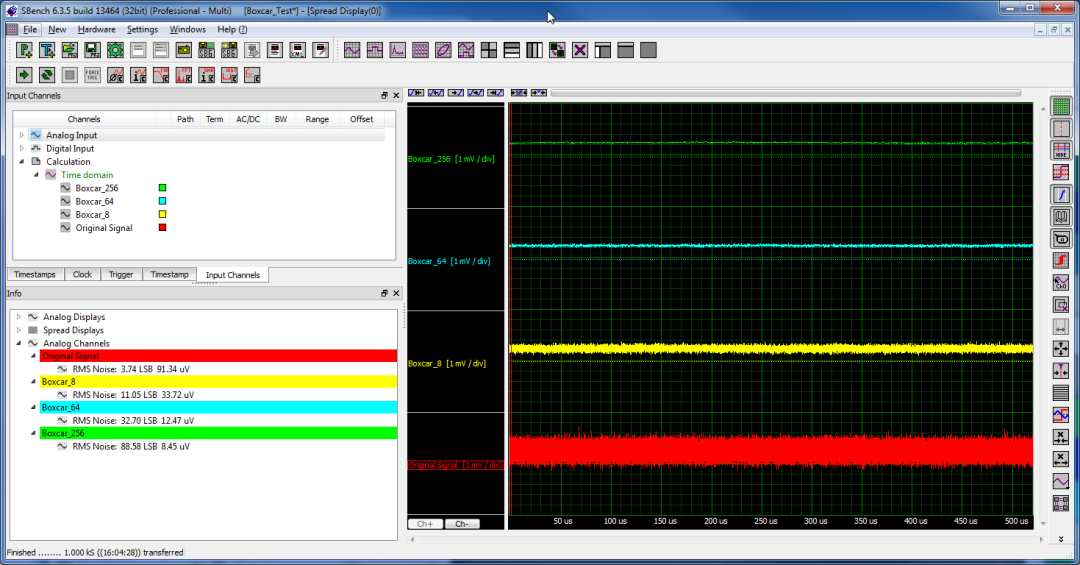
图 4. 将因子为 8、64 和 256 的 Boxcar 平均应用于噪声开路输入信号(红色迹线)以显示对 RMS 噪声水平的影响。
图 4 显示了 Boxcar 平均在降低信号的绝对本底噪声方面的效果。此处下方迹线(红色)再次由虹科 M4i.4451-x8 数字化仪进行采集,该数字化仪以 500 MS/s 的采样率和 14 位分辨率进行采样。迹线显示了当没有信号连接到数字化仪(实际上它有一个开路输入)时观察到的高本底噪声。使用虹科 SBench6 分析软件测量 RMS 噪声电平,并在“信息框”(左下窗口)中显示为 91.34 µV。应用因子为 8(黄色迹线)、64(蓝色迹线)和 256(绿色迹线)的 Boxcar 平均函数会导致 RMS 噪声大幅降低。SBench6 显示降低分别为 33.72、12.47 和 8.45 µV。
Boxcar 平均不仅可以降低高噪声水平对信号的影响,而且重要的是,它还可以改善低噪声水平情况下的结果。 例如,当使用高纯度信号时,测试表明 Boxcar Averaging 可以将数字化仪的性能(通过其 ENOB 测量)至少提高 2 位。其他动态参数,例如 SFDR 和 SNR 测量,也可以提高 12 dB 以上。表 1 显示了在采集高纯度 1 MHz 正弦波时测量虹科 M4i.4451-x8 数字化仪的动态性能参数时获得的典型结果。
表 1. 使用虹科 M4i.4450-x8 数字化仪进行的动态参数测量,使用标准采集模式和 Boxcar 平均,并使用高纯度 1 MHz 正弦波进行测试。
| _ | 标准模式 | Boxcar 8x | Boxcar 64x |
| 信 噪 比 | 68.1 dB | 76.8 dB | 80.5 dB |
| 谐波失真 | -80.1 dB | -80.2 dB | -82.0 dB |
| SFDR不包括 | 74.7 dB | 87.8 dB | 88.0 dB |
| ENOB (SINAD) | 11.0 LSB | 12.2 LSB | 12.7 LSB |
| ENOB (SNR) | 11.0 LSB | 12.5 LSB | 13.1 LSB |
04.亮点
Boxcar 平均的缺点是生成的波形被有效过滤,因此高频信号内容可能会丢失。Boxcar 平均因子会降低有效采样率。系数越高,采样率越低,由此产生的奈奎斯特频率限制就越低。然而,即使这样有时也是一种优势。由于 Boxcar 平均波形被平均因子抽取,因此存储的波形也是如此。 结果是波形只需要更少的板载内存,随后可以传输到 PC 并更快地处理。此外,即使产生的波形被抽取,虹科的实施也确保触发检测仍然以原始采集的全采样速度运行,因此平均信号和触发位置之间始终存在非常精确的定时关系。
05.简单的软件集成
虽然 Boxcar 平均模式是使用 FPGA 固件实现的,但它可以使用虹科Spectrum标准驱动程序套件 (SDK) 进行完全编程。SDK 允许使用几乎任何流行的语言进行编程,包括 C++、Visual Basic、VB.NET、C#、J#、Delphi、Java 和 Python。第三方软件支持和示例也免费提供,适用于 LabVIEW、LabWindows 和 MATLAB。对于那些不想自己编写程序的用户,虹科Spectrum提供了 SBench 6-Pro,这是一个易于使用的图形用户界面。SBench 6 提供对所有数字化仪操作模式和设置的控制。它显示、存储和处理波形,甚至可以用来记录结果。
结论
在目标信号频率远低于数字化仪采样率的情况下,Boxcar 平均技术具有许多优势。 与传统的平均方法不同,Boxcar 平均适用于单次采集。您不需要多个触发事件或可重复的信号。 此外,当信号被过采样时,Boxcar 平均允许以更高的分辨率进行幅度测量,并改善数字化仪的整体 ENOB、SNR 和 SFDR。Boxcar 平均波形也被平均因子抽取。因此,存储的波形尺寸减小,可以更快地传输和处理。















 115
115











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









