






组件建模的脚本控制
文章目录
一、为什么要用脚本控制?
利用python脚本可以快速实现组件建模的伺服控制
二、使用步骤
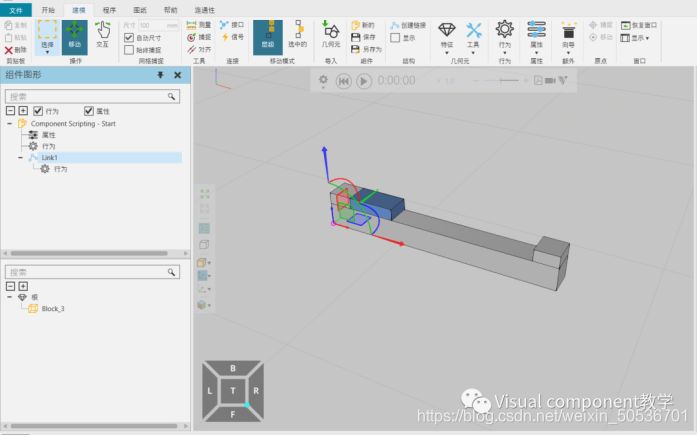
第一步:选中模型后,切换到建模页面,见下图:
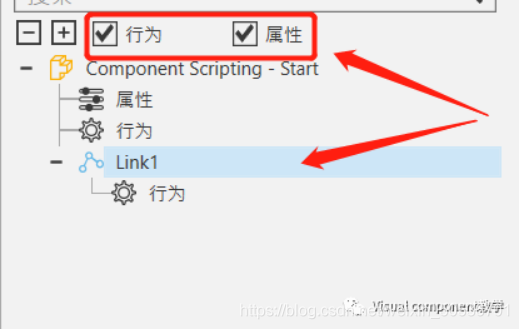
此时注意,选中行为和属性,同时点击Link1,见下图:
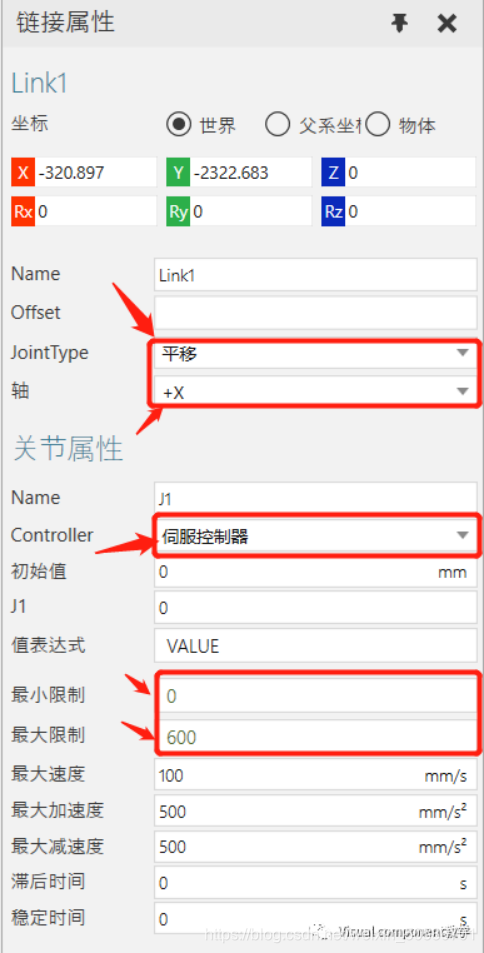
第二步:在链接属性面板中,选择平移,同时轴向为X轴,并创建新的伺服控制器,最大限制600,最小限制0,这个是从实际情况出发,滑块移动距离初始点为0,移动到另一边经过的距离是600。如下图:
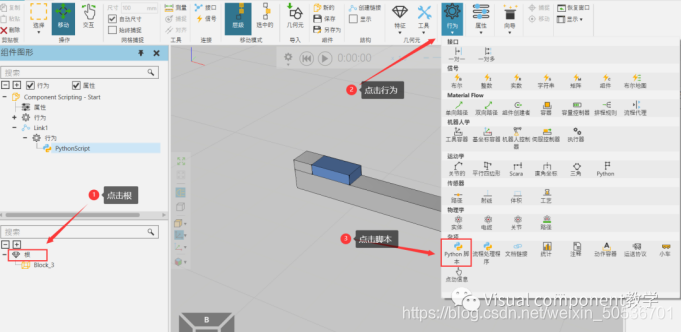
第三步:添加脚本。单击根节点之后,从行为中添加脚本,见下图:
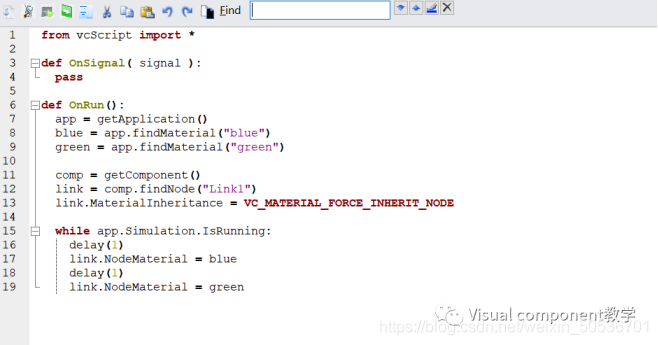
第四步:写一点简单的代码,编译之后仿真即可。具体代码可以看软件帮助文件,私信问我也可以,有空会帮各位解答。
def OnSignal( signal ):
pass
def OnRun():
app = getApplication()
blue = app.findMaterial("blue")
green = app.findMaterial("green")
comp = getComponent() link = comp.findNode("Link1")
link.MaterialInheritance = VC_MATERIAL_FORCE_INHERIT_NODE
while app.Simulation.IsRunning:
delay(1) link.NodeMaterial = blue
delay(1) link.NodeMaterial = green
仿真效果:
使用python脚本控制组件建模的伺服


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









