









游戏人生

题目大意
- 给你一个图,图上有点权和边权。以及q个查询:每个查询给你一个初始位置x和初始能量k;
- 你每到一个新点上即可获得该点的能量(即点权),但是如果想通过一条边,你的能量总数需要大于边权(可以来回走)
- 求可以获取的最大能量数。
引用 lwz_159的题解博客
首先贪心地想,能走到最多的点肯定能获得更多能量,但边权会是限制,在可以来回走的前提下,我们显然可以保留限制最小的边让这个图变成一颗树(最小生成树)
但仅仅有 最小生成树 并不能很好地处理 q 次询问的时间复杂度,这里我们再次引入 Kruskal重构树 来解决
在一颗 kruskal重构树 上,我们拥有神奇的性质:
- 这颗树上叶子节点都代表原图中的点,其余结点都是代表原图中的边
- 任意原最小生成树中的两点之间路径上 最大 的边权是他们在重构树上 最近公共祖先 lca 这个点的权值(这个点必定代表边)
- 这颗树有权值的点都代表边,他们会构成一个二叉堆,即一个子树的根节点权值必定大于他内部所有结点的权值(这里的权值是针对边的)
拥有了这样一颗重构树,我们就能用倍增的方式每次处理查询

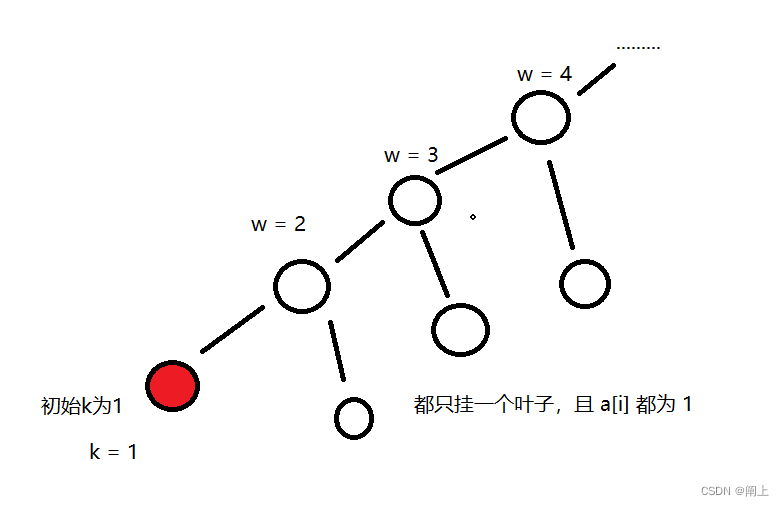
每次询问我们都会得到一个起始点(根据原则必定是叶子节点)和起始值,假设为图中的 a 点;在这颗重构树上我们每次尽可能往根节点跳,判断能不能跳过去就是判断 a点的值 是否大于等于 b点的值(边权限制)
一旦我们能跳到 b点,因为二叉堆的性质 b这条边 会是 b这个子树中最大的一条边,所以我们必定能得到 b子树中所有点的权值(最大的边都能走,其他小边肯定也能走过去)(这里的权值针对点)
跳的过程用倍增压缩,这样总时间就可以在 O ( q l o g n ) O(qlogn) O(qlogn) 内,一旦某次怎么都跳不上去我们就可以退出了(止步于此)
C o d e : Code: Code:
#include<bits/stdc++.h>
#include<unordered_map>
#define mem(a,b) memset(a,b,sizeof a)
#define cinios (ios::sync_with_stdio(false),cin.tie(0),cout.tie(0))
#define sca scanf
#define pri printf
#define forr(a,b,c) for(int a=b;a<=c;a++)
#define rfor(a,b,c) for(int a=b;a>=c;a--)
#define endl "\n"
//[博客地址]:https://blog.csdn.net/weixin_51797626?t=1
using namespace std;
inline void read(int& x) { x = 0; int f = 1; char ch = getchar(); while (ch < '0' || ch > '9') { if (ch == '-') f = -1; ch = getchar(); } while (ch >= '0' && ch <= '9') { x = x * 10 + (ch - '0'); ch = getchar(); } x *= f; }
void write(int x) { if (x < 0) putchar('-'), x = -x; if (x >= 10) write(x / 10); putchar(x % 10 + '0'); }
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int, int> PII;
const int N = 200010, M = 100010, MM = N;
int INF = 0x3f3f3f3f, mod = 1e9 + 7;
ll LNF = 0x3f3f3f3f3f3f3f3f;
int n, m, k, T, S, D;
struct edge
{
int a, b, w;
bool operator <(const edge& ee)const { return w < ee.w; }
}ed[M];
vector<int> e[N];//重构树,重构树最多会比原最小生成树多一倍的点
int a[N], p[N], down[N];
ll d[N];
int fa[N][18];
int find(int x) {
return p[x] == x ? p[x] : p[x] = find(p[x]);
}
int kruskal() { //先创建最小生成树
sort(ed + 1, ed + 1 + m);
forr(i, 1, 2 * n)p[i] = i;
int cnt = n;
forr(i, 1, m) {
int a = find(ed[i].a), b = find(ed[i].b);
if (a ^ b) {
d[++cnt] = ed[i].w;//同时用并查集建重构树
p[a] = p[b] = cnt;
e[cnt].push_back(a);
e[cnt].push_back(b);
}
}
return cnt;
}
int build(int x) { //递归预处理倍增,队列也可,不容易爆栈
int sum = a[x];
for (auto j : e[x]) {
fa[j][0] = x;
for (int i = 1; i <= 17; i++)
fa[j][i] = fa[fa[j][i - 1]][i - 1];
sum += build(j);
}
down[x] = sum;//以及以某点为根的子树内所有点权和
return sum;
}
int main() {
cinios;
cin >> n >> m >> k;
forr(i, 1, n)cin >> a[i];
forr(i, 1, m) {
int a, b, x;
cin >> a >> b >> x;
ed[i] = { a,b,x };
}
n = kruskal();
build(n);
d[0] = 1e18;//边界要给个极值
forr(i, 1, k) {
int x, q;
cin >> x >> q;
ll ans = 1ll * a[x] + q;
while (x != n)//跳到根节点为止
{
int x1 = x;
for (int i = 17; i >= 0; i--)
if (d[fa[x][i]] <= ans) {
x = fa[x][i];//能跳我们就跳上去
ans = 1ll * down[x] + q;
//随时更新携带的能量
}
if (x == x1)break;//如果某轮怎么都跳不动就退出
}
cout << ans << '\n';
}
return 0;
}
/*
*/
Hack数据 + 真正解
- 感谢 @weixin_49667031 的评论,上面的代码实际上是能被以下极端数据卡掉的:
如果是上面的代码,在这一段
ll ans = 1ll * a[x] + q;
while (x != n)//跳到根节点为止
{
int x1 = x;
for (int i = 17; i >= 0; i--)
if (d[fa[x][i]] <= ans) {
x = fa[x][i];//能跳我们就跳上去
ans = 1ll * down[x] + q;
//随时更新携带的能量
}
if (x == x1)break;//如果某轮怎么都跳不动就退出
}
cout << ans << '\n';
枚举向上跳跃的 2 i 2^i 2i 步数时,因为 ans 需要随时更新,我们最坏情况只能跳一步更新一下,用更新后变大的 ans 促使你之后继续上跳
在极端数据的情况下,叶子只有 n/2 个,则跳跃长度,枚举的次数也需要 n/2,此算法就退化成 O ( n 2 ) O(n^2) O(n2) 了。
但这个数据是能过牛客的,可能是出题人只想考察 重构树算法,保证了数据随机。
- 那么我们要如何解决呢?显然 ans 是关键,正是因为它的不固定性退化了算法。
对于每个点,我们假设能跳到该点,自然能获得以该点为根的子树内所有的 ∑ a [ i ] ∑a[i] ∑a[i] ,如果想要突破到这个点的父亲,则需要一个最低初始能量: n e e d [ i ] = w [ f a [ i ] ] − ∑ a [ i ] need[i] = w[fa[i]] - ∑a[i] need[i]=w[fa[i]]−∑a[i]。
每个点都维护一个从自身出发,往上跳 2 j 2^j 2j 步的路径中,所需要的 最大 最低初始能量,显然如果初始给的 K 能量能 大于等于 这个 最大 最低初始能量,就能跳到 f a [ i ] [ j ] fa[i][j] fa[i][j] 点。
预处理完这些,我们跳跃的时候就能摆脱 ans 的不固定性,让每次比较都与 固定的 初始能量 K 有关,这样算法的复杂度就真真正正做到了 O ( q l o g n ) O(qlogn) O(qlogn),空间比之前大了一倍,但绰绰有余。
上代码:
#include<bits/stdc++.h>
#include<unordered_map>
#define debug cout << "debug--- "
#define debug_ cout << "\n---debug---\n"
#define oper(a) operator<(const a& ee)const
#define forr(a,b,c) for(int a=b;a<=c;a++)
#define mem(a,b) memset(a,b,sizeof a)
#define cinios (ios::sync_with_stdio(false),cin.tie(0),cout.tie(0))
#define all(a) a.begin(),a.end()
#define sz(a) (int)a.size()
#define endl "\n"
#define ul (u << 1)
#define ur (u << 1 | 1)
using namespace std;
typedef unsigned long long ull;
typedef long long ll;
typedef pair<ll, int> PII;
const int N = 2e5 + 10, M = 2e6 + 10, mod = 1e9 + 7;
int INF = 0x3f3f3f3f; ll LNF = 0x3f3f3f3f3f3f3f3f;
int n, m, B = 10, ki;
struct edge
{
int a, b, w;
bool oper(edge) { return w < ee.w; }
}ed[M];
ll w[N], a[N];
int p[N];
int find(int x) {
return p[x] == x ? p[x] : p[x] = find(p[x]);
}
vector<int> e[N];
//重构树
void kruskal() {
for (int i = 0; i <= 2 * n + 2; i++)p[i] = i;
sort(ed + 1, ed + 1 + m);
int cnt = n;
for (int i = 1; i <= m; i++) {
auto [a, b, x] = ed[i];
a = find(a), b = find(b);
if (a ^ b) {
w[++cnt] = x;
p[a] = p[b] = cnt;
e[cnt].push_back(a);
e[cnt].push_back(b);
}
}
n = cnt;
}
int fa[N][18];
ll mx[N][18], need[N];
void dfs(int x) {
for (int to : e[x]) {
fa[to][0] = x;
for (int j = 1; j <= 17; j++)
fa[to][j] = fa[fa[to][j - 1]][j - 1];
dfs(to);
a[x] += a[to];
}
//a 数组存储 若能抵达 x,获取的 x 子树内所有的 a 值(能量)
need[x] = w[fa[x][0]] - a[x];
//need 存储,x 点突破到父亲所需的 最少能量
}
//mx 数组维护 从 x 点往上跳 2^j 步的路径内 最大的 need 值
void dfs_up(int x) {
for (int to : e[x]) {
mx[to][0] = need[to]; //跳 1 步就是突破 to 本身 到 fa[to]
//need[to] !!! 不是 need[x]
for (int j = 1; j <= 17; j++)
mx[to][j] = max(mx[to][j - 1], mx[fa[to][j - 1]][j - 1]);
dfs_up(to);
}
}
void solve() {
int q;
cin >> n >> m >> q;
for (int i = 1; i <= n; i++)cin >> a[i];
for (int i = 1; i <= m; i++) {
auto& [a, b, w] = ed[i];
cin >> a >> b >> w;
}
kruskal();
dfs(n);
a[0] = a[n];//有可能跳到根节点之上
dfs_up(n);
while (q--)
{
ll x, k;
cin >> x >> k;
//只要该路径满足 mx[x][j] <= k 就跳上去,这样就是稳定的 O(qlogn)
for (int j = 17; j >= 0; j--)
if (mx[x][j] <= k)
x = fa[x][j];
cout << a[x] + k << endl;
}
}
signed main() {
cinios;
int T = 1;
for (int t = 1; t <= T; t++) {
solve();
}
return 0;
}
/*
*/
//板子
一年前写这博客时还没想那么多,参考了别人的写法,现在看看还是有蛮多收获(x)错误(√)的
















 5481
5481











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









