







一、为什么要设计时间轮?
(一)简单的秒级定时任务实现:
在当前的高并发服务器中,我们不得不考虑⼀个问题,那就是连接的超时关闭问题。我们需要避免⼀个连接长时间不通信,但是也不关闭,空耗资源的情况。
这时候我们就需要⼀个定时任务,定时的将超时过期的连接进行释放。
(二)Linux提供给我们的定时器:
1.原型
#include <sys/timerfd.h>
int timerfd_create(int clockid, int flags);
clockid: CLOCK_REALTIME-系统实时时间,如果修改了系统时间就会出问题;
CLOCK_MONOTONIC-从开机到现在的时间是⼀种相对时间;
flags: 0-默认阻塞属性
int timerfd_settime(int fd, int flags, struct itimerspec *new, struct itimerspec *old);
fd: timerfd_create返回的⽂件描述符
flags: 0-相对时间, 1-绝对时间;默认设置为0即可.
new: ⽤于设置定时器的新超时时间
old: ⽤于接收原来的超时时间
struct timespec {
time_t tv_sec; /* Seconds */
long tv_nsec; /* Nanoseconds */
};
struct itimerspec {
struct timespec it_interval; /* 第⼀次之后的超时间隔时间 */
struct timespec it_value; /* 第⼀次超时时间 */
};
定时器会在每次超时时,⾃动给fd中写⼊8字节的数据,表⽰在上⼀次读取数据到当前读取数据期间超时了多少次。
2.例子
#include <iostream>
#include <cstdio>
#include <string>
#include <ctime>
#include <cstdlib>
#include <unistd.h>
#include <sys/timerfd.h>
#include <sys/select.h>
int main()
{
/*创建⼀个定时器 */
int timerfd = timerfd_create(CLOCK_MONOTONIC, 0);
struct itimerspec itm;
itm.it_value.tv_sec = 3;//设置第⼀次超时的时间
itm.it_value.tv_nsec = 0;
itm.it_interval.tv_sec = 3;//第⼀次超时后,每隔多⻓时间超时
itm.it_interval.tv_nsec = 0;
timerfd_settime(timerfd, 0, &itm, NULL);//启动定时器
/*这个定时器描述符将每隔三秒都会触发⼀次可读事件*/
time_t start = time(NULL);
while(1) {
uint64_t tmp;
/*需要注意的是定时器超时后,则描述符触发可读事件,必须读取8字节的数据,保存的是⾃上*/
int ret = read(timerfd, &tmp, sizeof(tmp));
if (ret < 0) {
return -1;
}
std::cout << tmp << " " << time(NULL) - start << std::endl;
}
close(timerfd);
return 0;
}
二、时间轮
(一)思想
上述的例子,存在⼀个很大的问题,每次超时都要将所有的连接遍历一遍,如果有上万个连接,效率无疑是较为低下的。
这时候大家就会想到,我们可以针对所有的连接,根据每个连接最近⼀次通信的系统时间建立⼀个小根堆,这样只需要每次针对堆顶部分的连接逐个释放,直到没有超时的连接为止,这样也可以大大提高处理的效率。
上述方法可以实现定时任务,但是这里给大家介绍另⼀种方案:时间轮
时间轮的思想来源于钟表,如果我们定了⼀个3点钟的闹铃,则当时针走到3的时候,就代表时间到了。
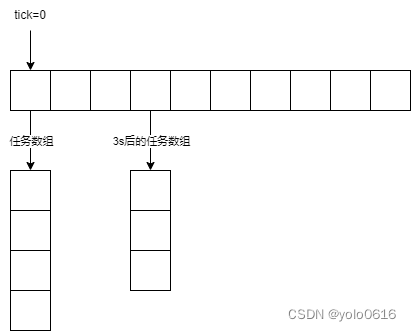
同样的道理,如果我们定义了一个数组,并且有一个指针,指向数组起始位置,这个指针每秒钟向后走动一步,走到哪里,则代表哪里的任务该被执行了,那么如果我们想要定一个3s后的任务,则只需要将任务添加到tick+3位置,则每秒中走一步,三秒钟后tick走到对应位置,这时候执行对应位置的任务即可。
但是,同一时间可能会有大批量的定时任务,因此我们可以给数组对应位置下拉一个数组,这样就可以在同一个时刻上添加多个定时任务了。
(一)代码
#include <iostream>
#include <list>
#include <vector>
#include <unordered_set>
#include <memory>
#include <cassert>
#include <unistd.h>
#include <functional>
/*定时任务类*/
using TaskFunc = std::function<void()>;
// 它是一个使用 std::function 模板类实现的函数指针。
//这里的函数指针是指可以指向任意函数的指针类型,其参数类型为 void(),表示该函数不接受任何参数,返回类型为 void。
using ReleaseFunc = std::function<void()>;
class TimeTask {
private:
uint64_t _id; // 定时器任务对象
uint64_t _timeout; // 定时任务的超时时间
bool _canceled; // false-表示没有被取消, true-表示被取消
TaskFunc _task_cb; // 定时器对象要执行的定时任务
ReleaseFunc _release; //用于删除TimerWheel中保存的定时器对象信息
public:
// 1.构造函数
TimeTask(uint64_t id,uint32_t delay,const TaskFunc &cb) : _id(id),_timeout(delay),_task_cb(cb) {}
// 2.析构函数
~TimerTask() {
if (_canceled == false) _task_cb();
_release();
}
void Cancel() { _canceled = true; }
void SetRelease(const ReleaseFunc &cb) { _release = cb; }
uint32_t DelayTime() { return _timeout; }
};
class TimeWheel {
private:
using WeakTask = std::weak_ptr<TimeTask>;
// std::weak_ptr 是 C++11 标准库中引入的一种智能指针,
// 它提供了对指针所指向对象的弱引用。当弱引用超出作用域或者对象被销毁时,
// 智能指针会自动设置为 nullptr,从而避免了悬空指针(dangling pointer)的问题。
using PtrTask = std::share_ptr<TimeTask>;
std::vector<std::vector<PtrTask>> _wheel;
int _tick; // 当前的秒针
int _capacity; // 表盘最大数量 ——其实就是最大延迟时间
std::unordered_map<uint64_t,WeakTask> _timers;
private:
void RomoveTimer(uint64_t id) {
auto it = _timers.find(id);
if (it != _timers.find(id)) {
_timers.arase(it);
}
}
public:
Wheel() _capacity(60),_tick(0),_wheel(_capacity) {}
}
#include <iostream>
#include <vector>
#include <unordered_map>
#include <cstdint>
#include <functional>
#include <memory>
#include <unistd.h>
using TaskFunc = std::function<void()>;
using ReleaseFunc = std::function<void()>;
class TimerTask{
private:
uint64_t _id; // 定时器任务对象ID
uint32_t _timeout; //定时任务的超时时间
bool _canceled; // false-表示没有被取消, true-表示被取消
TaskFunc _task_cb; //定时器对象要执行的定时任务
ReleaseFunc _release; //用于删除TimerWheel中保存的定时器对象信息
public:
TimerTask(uint64_t id, uint32_t delay, const TaskFunc &cb):
_id(id), _timeout(delay), _task_cb(cb), _canceled(false) {}
~TimerTask() {
if (_canceled == false) _task_cb();
_release();
}
void Cancel() { _canceled = true; }
void SetRelease(const ReleaseFunc &cb) { _release = cb; }
uint32_t DelayTime() { return _timeout; }
};
class TimerWheel {
private:
using WeakTask = std::weak_ptr<TimerTask>;
using PtrTask = std::shared_ptr<TimerTask>;
int _tick; //当前的秒针,走到哪里释放哪里,释放哪里,就相当于执行哪里的任务
int _capacity; //表盘最大数量---其实就是最大延迟时间
std::vector<std::vector<PtrTask>> _wheel;
std::unordered_map<uint64_t, WeakTask> _timers;
private:
void RemoveTimer(uint64_t id) {
auto it = _timers.find(id);
if (it != _timers.end()) {
_timers.erase(it);
}
}
public:
TimerWheel():_capacity(60), _tick(0), _wheel(_capacity) {}
void TimerAdd(uint64_t id, uint32_t delay, const TaskFunc &cb) {
PtrTask pt(new TimerTask(id, delay, cb));
pt->SetRelease(std::bind(&TimerWheel::RemoveTimer, this, id));
int pos = (_tick + delay) % _capacity;
_wheel[pos].push_back(pt);
_timers[id] = WeakTask(pt);
}
//刷新/延迟定时任务
void TimerRefresh(uint64_t id) {
//通过保存的定时器对象的weak_ptr构造一个shared_ptr出来,添加到轮子中
auto it = _timers.find(id);
if (it == _timers.end()) {
return;//没找着定时任务,没法刷新,没法延迟
}
PtrTask pt = it->second.lock();//lock获取weak_ptr管理的对象对应的shared_ptr
int delay = pt->DelayTime();
int pos = (_tick + delay) % _capacity;
_wheel[pos].push_back(pt);
}
void TimerCancel(uint64_t id) {
auto it = _timers.find(id);
if (it == _timers.end()) {
return;//没找着定时任务,没法刷新,没法延迟
}
PtrTask pt = it->second.lock();
if (pt) pt->Cancel();
}
//这个函数应该每秒钟被执行一次,相当于秒针向后走了一步
void RunTimerTask() {
_tick = (_tick + 1) % _capacity;
_wheel[_tick].clear();//清空指定位置的数组,就会把数组中保存的所有管理定时器对象的shared_ptr释放掉
}
};
class Test {
public:
Test() {std::cout << "构造" << std::endl;}
~Test() {std::cout << "析构" << std::endl;}
};
void DelTest(Test *t) {
delete t;
}
int main()
{
TimerWheel tw;
Test *t = new Test();
tw.TimerAdd(888, 5, std::bind(DelTest, t));
for(int i = 0; i < 5; i++) {
sleep(1);
tw.TimerRefresh(888);//刷新定时任务
tw.RunTimerTask();//向后移动秒针
std::cout << "刷新了一下定时任务,重新需要5s中后才会销毁\n";
}
tw.TimerCancel(888);
while(1) {
sleep(1);
std::cout << "-------------------\n";
tw.RunTimerTask();//向后移动秒针
}
return 0;
}
一个时间轮写的我都要痛苦死了。。。
呜呜呜呜谁能救救我。。。。。。。。
















 4912
4912











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









