






导语
车辆运行与交通安全事关群众生命健康和财产安全,是道路交通安全管理的核心目标。传统的车辆运行安全由车辆标准、检测和维护保养等来保障,而车辆使用中的道路交通安全主要由驾驶人的安全文明驾驶意识和技能来保障。随着先进主动安全技术在车辆上的应用逐渐增多,传统“车辆”和“驾驶人”在交通安全中的职责和界限逐渐模糊,这为将车辆运行安全和道路交通安全评价的方法结合起来,开展更系统、更精准的安全评价和风险研判提供了可能。基于此,公安部道路交通安全研究中心梳理了常见的各类车辆运行与交通安全风险评价的方法,分析了其使用中的优劣势,以及各类方法之间的关系,进而提出了综合应用各类安全风险评价的思路建议,供大家参考借鉴。
一、车辆运行与交通安全风险概述
车辆运行安全关注的是在汽车运行的道路交通环境中不对驾乘人员和其他交通参与者造成伤害的能力。车辆运行安全更多关注的是人的安全,当然也会涉及到碰撞过程中的财产损失和对动物等的伤害。车辆运行及其交通安全风险的保持是一个持续动态的过程,并且是一个系统工程,不仅与车辆本身的安全相关,也与其所在的道路交通系统密切相关。
从工程视角看,安全主要着眼于“问题”——即系统中的薄弱环节。在确定安全问题时,需要考虑以下两点:(1)因系统“薄弱”而导致的“问题”出现的概率;(2)问题的严重程度。为了增强安全,可以采取一系列举措:如防止伤害发生,减少事故发生的概率或降低事故损害的严重程度。上述安全措施常见于车辆安全设计中,如通过使用碰撞吸能结构件、气囊、安全带等,降低碰撞中人员的伤亡水平;又如通过制动系统,避免事故发生或减少碰撞能量。
从公共卫生视角看,安全是风险的结果,即一定量的人群暴露在一定的风险环境下会造成不同类型、不同程度的伤害。因而,交通安全指标通常是考虑一定量的人群暴露(如人口数、驾驶人数、机动车保有量等),或一定量的行驶里程(如亿车公里)下的伤亡水平。这种方法只能衡量整体的交通安全水平,安全的具体内容还是不够清晰、不够确定。为了更清晰揭示伤害或碰撞因素与交通安全干预方法之间的关系,哈顿基于伤害流行病学原理,提出了哈顿矩阵模型(图1)。该模型围绕驾驶人、车辆和环境(包括物理环境、文化环境、法律环境、应急救援系统)的安全影响因素,有机分配至事故前、事故中、事故后三个阶段,进而形成了主干预(预防事故发生)、次干预(最小化事故损害)、三级干预(提升医疗支持度,最小化永久损害)等三个不同层次的干预对策框架。

图1:哈顿矩阵
二、车辆运行与交通安全风险评价方法
车辆运行与交通安全风险评价方法通常分为三类,分别是标准符合性验证、交通安全替代方法和事故结果评价(图2)。
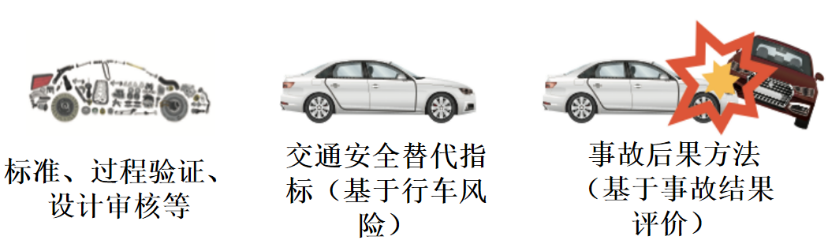
图2:车辆运行安全与交通安全风险评价方法框架
1
标准符合性验证
主要考核是否按照标准、规程、工艺流程和技术细则要求来开展汽车软硬件、部件、系统和整车的设计、制造。该方法从技术层面着眼考虑车辆安全性,依据的标准多种多样,包括国际、国内、行业、团体、企业等各个层面的标准和规范。随着技术的不断进步,各类标准规范也在不断迭代发展,再加上标准符合性更多地聚焦在车辆底层的部件和系统,在反映车辆的总体安全性能,特别是在真实道路交通环境中的运行表现方面存在一定的不足。
2
交通安全替代方法
交通安全替代方法主要反映的是车辆及其驾驶人的安全状态、功能表现和规避事故的能力,聚焦在哈顿矩阵“事故前”所在行的内容。“替代方法”是指对“事故结果”的替代,虽不代表最终事故结果,但其能反映事故可能性和严重性行为的前兆。在一定的通行里程下,替代方法指标出现的概率远高于“事故结果”,因而在考虑一定的统计数据置信度基础上,应用替代方法可以很好地表征车辆及其驾驶人的交通安全特性。
交通违法就是一种典型的交通安全替代指标。无论从理论分析还是从统计数据来看,交通违法与交通事故之间都存在着较强的相关关系,特别是不遵守通行规定、不遵守交通信号等违法行为与交通事故间具有更强的相关性。
车辆交通安全指标,指的是车辆能够在道路上安全通行,不致引起对其他交通参与者的伤害,并且可以较安全地应对其他交通参与者引发的风险。这类指标应具有客观、物理属性、现有技术可获取、体现显性或隐性的交通规则(风险)等特性,能够捕获围绕在车辆周围的交通扰动和风险。表1列举了几类常见的车辆交通安全指标及其使用中的优劣点。
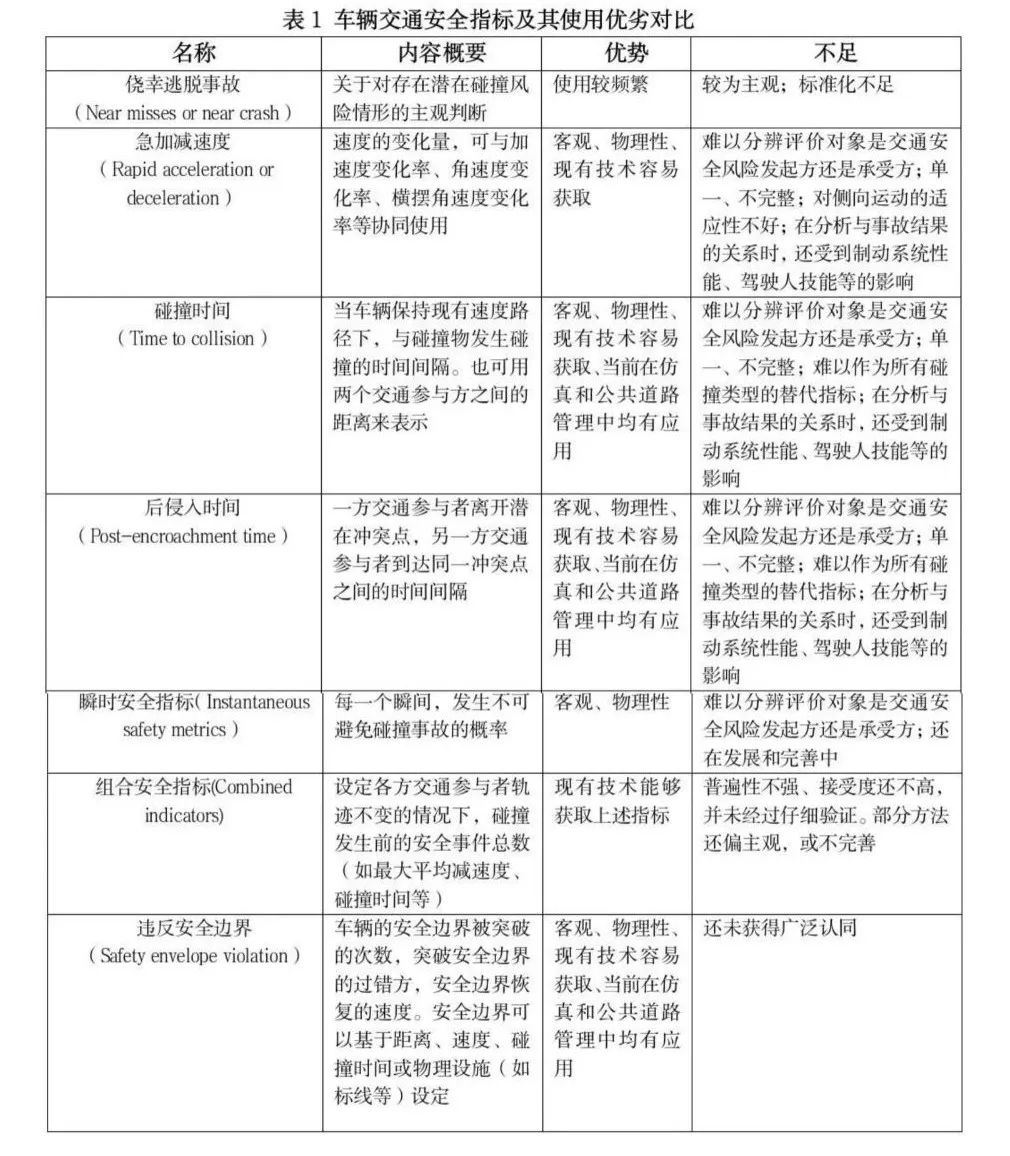
理想的车辆交通安全指标应能够区分不安全决策的发起者和被动应对者,后者一般情况下不宜被责备,还应能够为鼓励车辆提前作出科学的预测和应对提供支撑。在表1列举的主要车辆交通安全指标中,“违反安全边界”的方法最接近上述要求,难点在于如何定义安全边界。在这方面,责任敏感模型(Responsibility Sensitive Safety,RSS)提供了良好的实践。该模型针对不同通行场景,应用一系列实证算法定义安全边界:(1)与前车保持安全距离;(2)与侧向车辆保持安全距离;(3)遵守路权让行原则;(4)当视野受阻时,提出量化“注意要求”。安全距离边界是基于速度、时间和空间定义的;让行边界是基于动作行为定义的;“注意要求”则是基于道路和环境条件定义的。在该模型中,违反安全边界的次数代表着违反交通规则的次数。为了更好满足“区分不安全决策的发起者和被动应对者”的要求,该模型还包含了通过计算确定责任的内容。为了便于该模型的实际应用,还需要开发实时监测、跟踪车辆违反安全边界的方法和手段。
3
事故结果评价
事故结果评价主要是根据对事故及其伤害后果的观察得出的。该类指标聚焦在哈顿矩阵的“事故时”和“事故后”两行。事故结果指发生真实的碰撞接触,进而造成了人员伤亡或财产损失。为了让分析更有针对性,事故结果评价常常根据事故类型或事故形态做分类计算。
三、车辆运行与交通安全风险方法应用
单一的交通安全替代方法无法全面反映和评价交通安全状况,但各类交通安全替代方法的特性均决定了其具有更适宜的应用场景,且各类方法之间存在着紧密的有机联系。事故结果评价方法虽然真实,但较为少见,而安全替代方法是其较好的先行性指标。某一类事故评价方法产生的结果,也可以是另一种事故评价方法可能结果的预兆。比如,某个路段或某个场景下,轻微事故多发,则可能预示着会有更严重的事故发生。这种关联性可以用海恩法则有效说明(图3)。
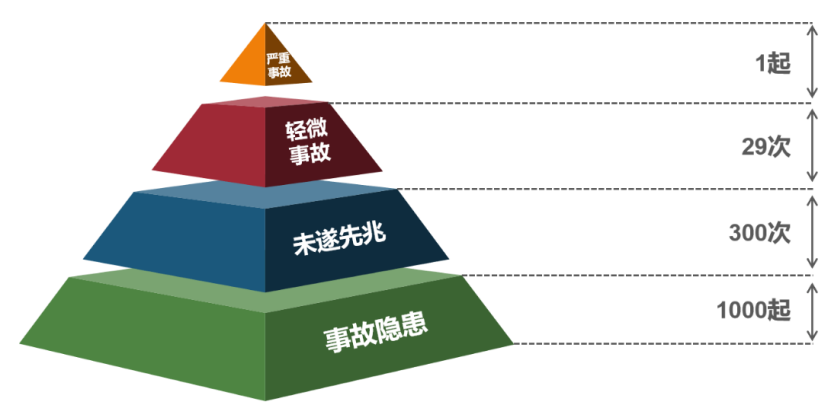
图3:交通安全风险海恩法则
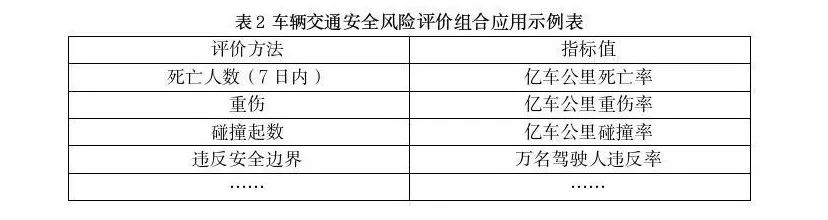
因此,组合应用各类交通安全评价方法可以充分发挥各类方法的优势,弥补单一方法的不足,进而对车辆运行和交通安全状态作出全面的画像和评价。表2为组合应用车辆交通安全风险评价的一个示例。
综合应用各类交通安全评价方法,可以从不同视角、不同层次揭示安全风险、开展安全评价,这非常有利于区分安全风险中“人”“车”“路”“环境”的具体表现和不足,进而开展针对性的预防和控制。
(文 /公安部道路交通安全研究中心 周文辉 张政平)
编校 | 张翼飞 高海燕
欢迎扫下面二维码加入智能交通技术群!

点击文后阅读原文,可获得下载资料的方法。

欢迎加入智能交通技术群!
联系方式:微信号18515441838


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









