









 东风公司技术中心的42辆自动驾驶出租车RoboTaxi在武汉试运行,展示了自动驾驶技术的发展。环境感知是自动驾驶核心技术之一,依赖于摄像头、毫米波雷达和激光雷达等传感器。激光雷达通过生成3D点云进行环境建模,但无法识别交通标志,故需多种传感器融合。景联文科技凭借高效准确的3D激光点云标注技术,赢得了知名大厂项目,展现了在自动驾驶数据标注领域的专业实力。
东风公司技术中心的42辆自动驾驶出租车RoboTaxi在武汉试运行,展示了自动驾驶技术的发展。环境感知是自动驾驶核心技术之一,依赖于摄像头、毫米波雷达和激光雷达等传感器。激光雷达通过生成3D点云进行环境建模,但无法识别交通标志,故需多种传感器融合。景联文科技凭借高效准确的3D激光点云标注技术,赢得了知名大厂项目,展现了在自动驾驶数据标注领域的专业实力。
上半年,东风公司技术中心研发的42辆自动驾驶出租车RoboTaxi在武汉开始试运行,武汉市民通过手机APP预约,就可以试乘自动驾驶出租车,这条新闻吸引了很多媒体,汽车从业者和科技从业者的关注。
众所周知,自动驾驶是一个庞大而复杂的系统,集合了很多人工智能的核心技术,其中很重要的一部分是环境感知。车辆行驶在道路上周围环境包括路面,静态物体和动态物体,对于动态物体,不仅要检测还要追踪它的移动轨迹,根据追踪结果预测下一时刻的位置,环境感知能够帮助车辆观察周围情况,就像人类的眼睛一样,眼睛先要看到,大脑才能根据具体情况作出决策。
环境感知首先需要传感器来获取道路环境信息,主要有三类传感器:视觉传感器也就是摄像头,毫米波雷达传感器,和激光雷达传感器。
目前智能驾驶车辆使用的视觉传感器包括智能前视摄像头(单目/双目)、广角摄像头、夜视红外摄像头,用来捕捉2D视觉数据,可以实现探测障碍物,检测车道线,道路信息读取,地图构建和辅助定位等功能,但二维数据不能识别车辆周围检测对象的距离,因此要用到毫米波雷达传感器,和激光雷达传感器,其中激光雷达传感器以其分辨率高,抗干扰能力强的优势被广泛应用于自动驾驶技术。
激光雷达通过向四周发射激光束,并通过反射回来的信号绘制出周围环境的3D模型,每秒能生成高达200万个点的点云,输出格式为.pcd,可以测量周围围物体的形状和轮廓,采集3D位置数据。
但激光雷达没有道路信息读取功能,无法识别交通信号灯和交通标志等信息,因此自动驾驶车辆会使用多种类型传感器,将二维视觉数据和三维位置数据相结合,来识别周围的物理环境,并且在车辆上安装的各类型传感器可能不止一个。
例如RoboTaxi,便配备了3个激光雷达和8个摄像头。
激光雷达生成的3D点云图像经过标注可以用于自动驾驶系统训练,随着性能的提升,自动驾驶技术需要的训练数据量几乎是呈指数级增长,常见的标注方式有3D矩形框标注,3D点云语义分割,点云连续帧标注,2D3D融合标注等,景联文科技自建标注平台可以为点云数据标注提供全面的工具支持。
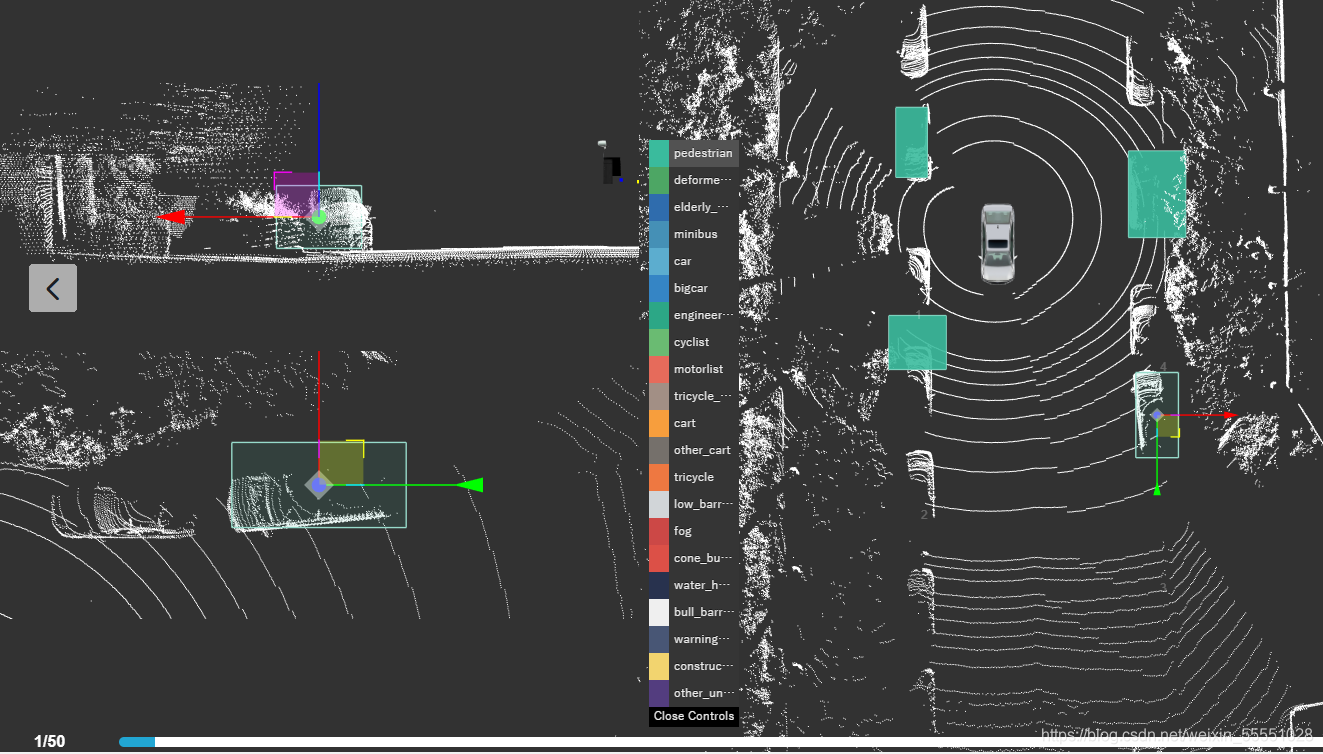
凭借着在智能驾驶领域积累的大量标注经验,日前,景联文科技更是通过试标以极高的标注效率和准确率,拿下知名大厂关于自动驾驶的3D激光点云标注项目,充分体现了景联文强大的技术支持能力和项目管理能力。


















 271
271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









