







作者姓名:[姓名]
作者单位:[单位名称]
摘要
本文综述了双目视觉及三维建模领域的研究进展,分析了当前的研究热点与难点,并探讨了可能的解决方法。双目视觉技术通过模拟人类双眼的视觉原理,实现对物体三维信息的获取,在机器人导航、工业自动化、医学影像处理等领域具有广泛应用。本文首先介绍了双目视觉的基本原理和方法,然后详细阐述了近年来该领域的研究热点,包括高精度三维重建、复杂场景下的立体匹配、实时三维测量等。针对当前存在的难点问题,如镜头畸变校正、遮挡处理、计算效率等,本文也进行了深入探讨,并提出了一些潜在的解决方案。最后,本文展望了双目视觉及三维建模技术的发展趋势。
关键词:双目视觉;三维建模;立体匹配;三维重建;镜头畸变
前言
双目视觉作为计算机视觉的一个重要分支,通过模拟人类双眼的立体感知能力,为物体和场景的三维信息获取提供了有效手段。近年来,随着计算机技术、图像处理技术和人工智能技术的快速发展,双目视觉及三维建模技术取得了显著进展,在工业自动化、机器人导航、医学影像处理、增强现实等领域展现出广阔的应用前景。本文将对双目视觉及三维建模领域的研究进展进行全面综述,以期为该领域的进一步发展提供参考。
一、双目视觉基本原理与方法
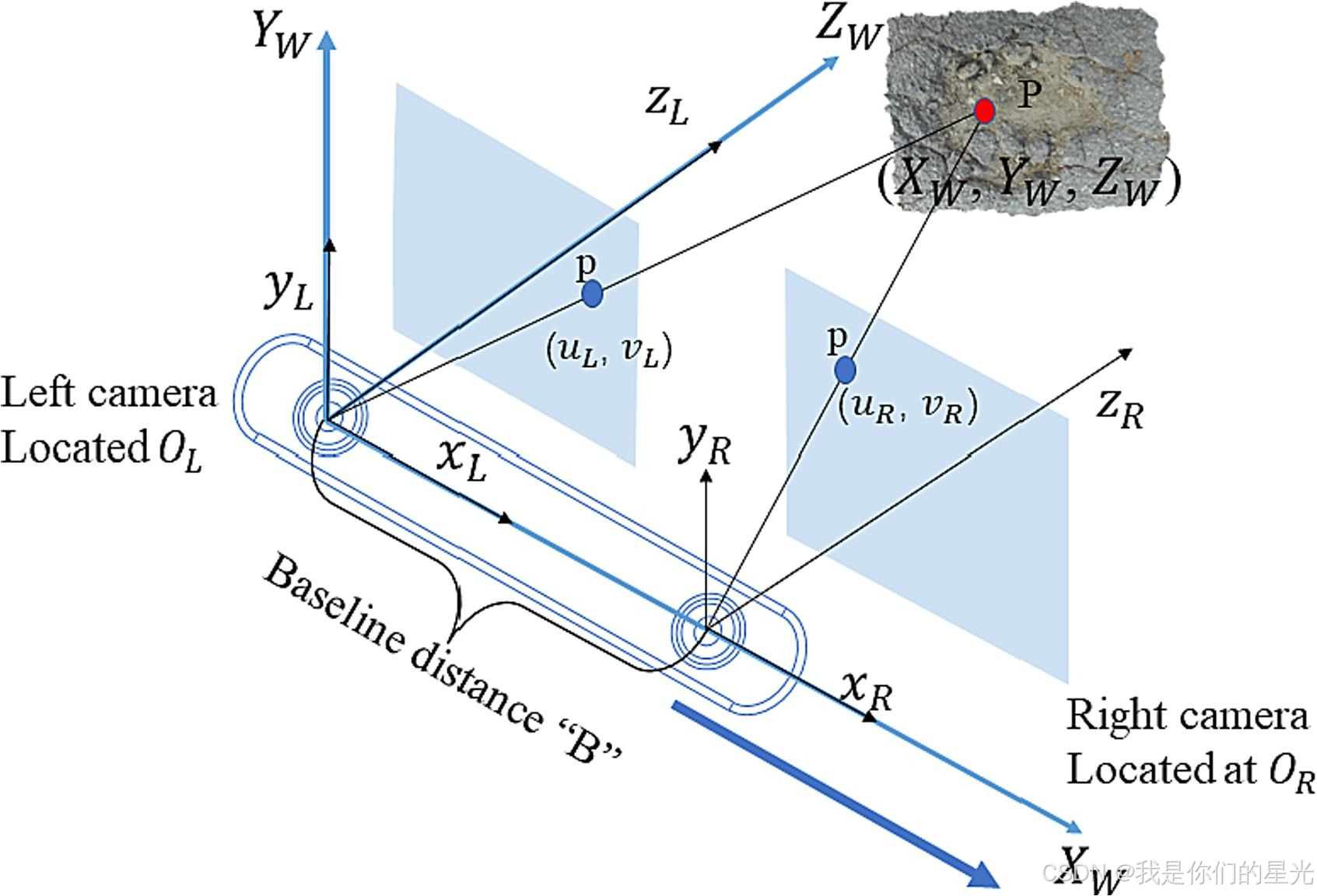
双目视觉技术基于视差原理,通过两个摄像机从不同角度拍摄同一场景,然后根据图像间的对应关系恢复出物体的三维信息。双目视觉系统通常由两个摄像机、图像采集卡、计算机等部分组成。在双目视觉中,关键步骤包括摄像机标定、立体匹配和三维重建。摄像机标定用于获取摄像机的内外参数,立体匹配则用于找到两幅图像中对应点的位置,而三维重建则是根据匹配结果和摄像机参数恢复出物体的三维坐标。
二、双目视觉研究热点
(一)高精度三维重建
高精度三维重建是双目视觉领域的一个研究热点。随着计算机图形学和图像处理技术的不断发展,人们对三维重建的精度要求越来越高。为了实现高精度三维重建,研究者们提出了多种方法,如基于特征点的三维重建、基于深度学习的三维重建等。这些方法通过优化立体匹配算法、提高摄像机标定精度等手段,有效提高了三维重建的精度和鲁棒性。
参考文献:[题目中的相关论文1]
(二)复杂场景下的立体匹配
复杂场景下的立体匹配是双目视觉领域的另一个挑战。在复杂场景中,由于光照变化、纹理缺失、遮挡等问题,立体匹配变得尤为困难。为了解决这些问题,研究者们提出了多种立体匹配算法,如半全局匹配算法、自适应窗口匹配算法等。这些算法通过考虑图像的全局信息和局部信息,有效提高了立体匹配的准确性和鲁棒性。
参考文献:[题目中的相关论文2、3]
(三)实时三维测量
实时三维测量是双目视觉领域的一个重要应用方向。在工业自动化、机器人导航等领域,实时三维测量对于提高生产效率和保障安全具有重要意义。为了实现实时三维测量,研究者们致力于优化双目视觉系统的处理速度和计算效率。通过采用并行计算、硬件加速等技术手段,有效提高了双目视觉系统的实时性和准确性。
参考文献:[题目中的相关论文4]
三、双目视觉研究难点与解决方法
(一)镜头畸变校正
镜头畸变是影响双目视觉系统精度的一个重要因素。由于摄像机的镜头存在径向畸变和切向畸变等问题,导致拍摄的图像产生失真。为了校正镜头畸变,研究者们通常采用摄像机标定方法获取摄像机的内外参数和畸变系数,然后利用这些参数对图像进行畸变校正。此外,还可以采用深度学习等方法对畸变进行预测和补偿,进一步提高校正精度。
(二)遮挡处理
遮挡问题是双目视觉领域的一个难点。在立体匹配过程中,由于遮挡导致部分像素点无法找到对应点,从而影响三维重建的精度。为了解决遮挡问题,研究者们提出了多种方法,如基于视差图的方法、基于深度学习的方法等。这些方法通过利用图像的全局信息和局部信息,有效提高了遮挡处理的准确性和鲁棒性。
(三)计算效率
计算效率是影响双目视觉系统实时性的一个重要因素。由于双目视觉系统需要进行大量的图像处理和计算工作,导致处理速度较慢。为了提高计算效率,研究者们致力于优化算法和采用高效的计算平台。通过采用并行计算、硬件加速等技术手段,有效提高了双目视觉系统的处理速度和实时性。
四、双目视觉及三维建模技术发展趋势
随着计算机技术、图像处理技术和人工智能技术的不断发展,双目视觉及三维建模技术将呈现出以下发展趋势:
- 高精度与高效率并存:未来双目视觉及三维建模技术将在保持高精度的同时,不断提高处理速度和计算效率,以满足实时性要求较高的应用场景。
- 智能化与自动化融合:结合深度学习、机器学习等人工智能技术,双目视觉及三维建模技术将实现更加智能化的处理和分析,提高系统的自动化水平和鲁棒性。
- 多模态信息融合:将双目视觉与其他传感器(如激光雷达、惯性导航等)相结合,实现多模态信息的融合与互补,提高三维信息的准确性和完整性。
- 应用场景拓展:随着技术的不断进步和应用需求的不断增长,双目视觉及三维建模技术将在更多领域得到广泛应用,如智能交通、智慧城市、文物保护等。
总结
本文综述了双目视觉及三维建模领域的研究进展,分析了当前的研究热点与难点,并探讨了可能的解决方法。双目视觉技术作为计算机视觉的一个重要分支,在工业自动化、机器人导航、医学影像处理等领域具有广泛应用前景。未来,随着计算机技术、图像处理技术和人工智能技术的不断发展,双目视觉及三维建模技术将实现更加高精度、高效率、智能化和自动化的处理和分析,为更多领域的应用提供有力支持。
参考文献
- High quality 3D reconstruction based on fusion of polarization imaging and binocular stereo vision
- Research on 3D Reconstruction of Binocular Vision Based on Thermal Infrared
- Three-Dimensional Reconstruction of Welding Pool Surface by Binocular Vision
- A Shape Reconstruction and Measurement Method for Spherical Hedges Using Binocular Vision


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









