







一、进入官网配置
1、选择SDK定制

2、配置SDK

更具自己的要求配置,配置好后点击生成。
 3、生成后就会得到一个压缩包,然后解压,得到LinkSDK文件。
3、生成后就会得到一个压缩包,然后解压,得到LinkSDK文件。
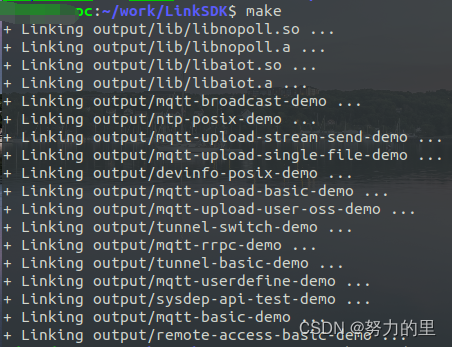
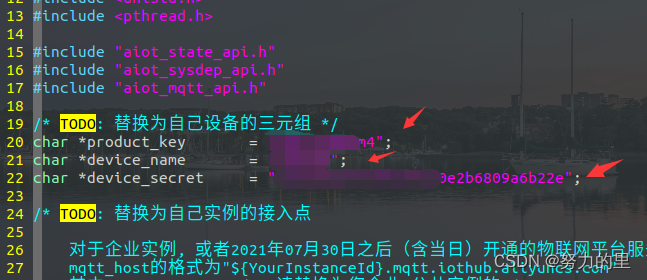
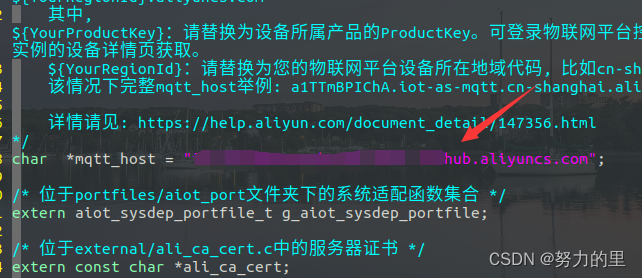
4、将解压后的文件复制到Linux系统中,先在终端在LinkSDK目录下,输入make,打开demos/mqtt_basic_demo.c,修改相应信息
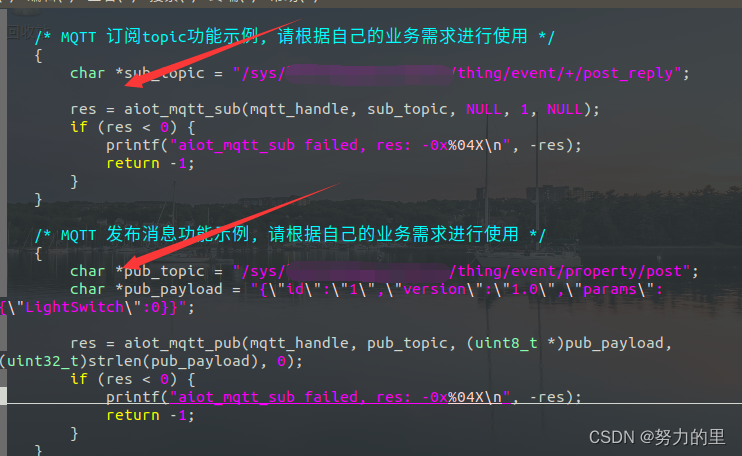
5、如果需要订阅和发布,修改以下函数:
6、然后在make编译一下,完成后,运行
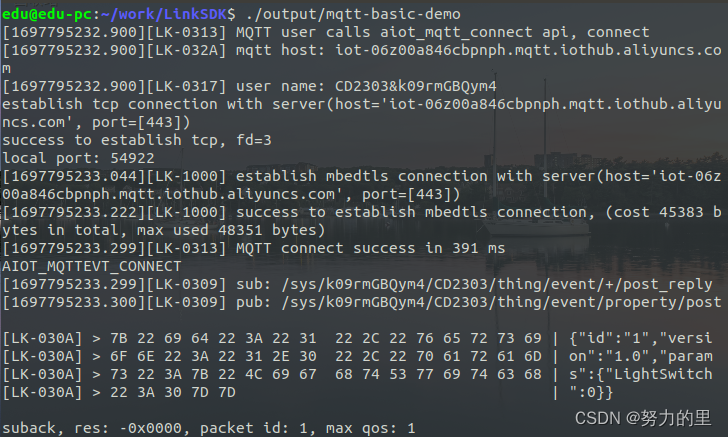
显示连接成功!
二、读取温湿度,并将温湿度通过蓝牙发送
stm32读取到温湿度,蓝牙读取数据,并发送给另一个蓝牙,另一个蓝牙连接到Linux系统。
在RT-Thread系统中,读取温湿度:
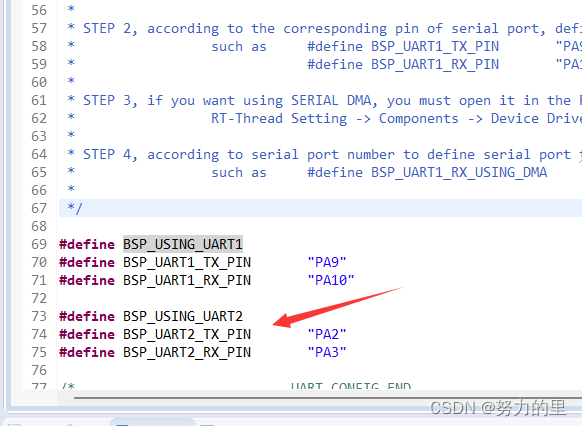
1、使用UART2:
2、添加DHT11软件包:
 3、主函数main.c,主要是把数据组包,通过AT指令发送到另一个蓝牙
3、主函数main.c,主要是把数据组包,通过AT指令发送到另一个蓝牙
/*
* Copyright (c) 2006-2023, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2023-10-19 RT-Thread first version
*/
#include <rtthread.h>
#include <rtdevice.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include <board.h>
#include <stdio.h>
#include <string.h>
#include "dhtxx.h"
#define SAMPLE_UART_NAME "uart2" /* 串口设备名称 */
static rt_device_t serial; /* 串口设备句柄 */
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT; /* 初始化配置参数 */
char str[]={0xAA,0xFB,0xFF,0xFF,0x48,0x45,0x4C,0x4C,0x4F,0x0D};
char str1[]={0xAA,0xFB,0xFF,0xFF,0x0D};
char buffer[50];
rt_int32_t temp;
rt_int32_t humi;
int main(void)
{
// dht_device_t sensor = dht_create(23);
//
// if(dht_read(sensor)) {
// temp = dht_get_temperature(sensor);
// humi = dht_get_humidity(sensor);
//
// rt_kprintf("Temp: %d, Humi: %d\n", temp/10, humi/10);
// }
// else {
// rt_kprintf("Read dht sensor failed.\n");
// }
// rt_thread_mdelay(3000);
// dht_delete(sensor);
/* step1:查找串口设备 */
serial = rt_device_find(SAMPLE_UART_NAME);
/* step2:修改串口配置参数 */
config.baud_rate = BAUD_RATE_115200; //修改波特率为 115200
config.data_bits = DATA_BITS_8; //数据位 8
config.stop_bits = STOP_BITS_1; //停止位 1
config.bufsz = 128; //修改缓冲区 buff size 为 128
config.parity = PARITY_NONE; //无奇偶校验位
/* step3:控制串口设备。通过控制接口传入命令控制字,与控制参数 */
rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config);
/* step4:打开串口设备。以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 发送字符串 */
while(1)
{
dht_device_t sensor = dht_create(23);
if(dht_read(sensor)) {
temp = dht_get_temperature(sensor);
humi = dht_get_humidity(sensor);
//rt_kprintf("Temp: %d, Humi: %d\n", temp/10, humi/10);
}
else {
rt_kprintf("Read dht sensor failed.\n");
}
//rt_thread_mdelay(3000);
dht_delete(sensor);
//snprintf(buffer, sizeof(buffer),"0x%02X",(unsigned int)temp/10);
char buff[10];
snprintf(buff,sizeof(buff),"%d%d",temp/10,humi/10);
char buf[]={0xAA,0xFB,0xFF,0xFF,'\0'};
char buf1[]={0x0D,'\0'};
char result[sizeof(buf) + strlen(buff) + sizeof(buf1)+1];
//strcpy(result, buf); // 复制 buf 到结果缓冲区
//strcat(result, buff); // 连接 buff 到结果缓冲区
//strcat(result, buf1); // 连接 buf1 到结果缓冲区
snprintf(result, sizeof(result), "%s%s%s", buf, buff, buf1);
rt_kprintf("%s",result);
//rt_device_write(serial, 0, str, strlen(str));
rt_device_write(serial, 0, result, sizeof(result));
rt_thread_mdelay(2000);
}
return RT_EOK;
}
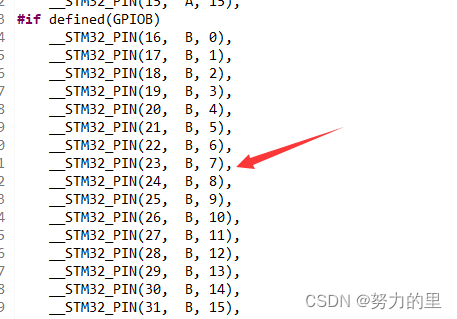
4.连线
这里是23,对应的口是PB7
5.修改上云程序,增加蓝牙接受数据,解包,读取温湿度
蓝牙接受函数:
#include <stdio.h> // 引入标准输入输出库
#include <stdlib.h> // 引入标准库(如:malloc和free等函数)
#include <string.h> // 引入字符串操作函数库
#include <unistd.h> // 引入UNIX标准函数库
#include <fcntl.h> // 文件控制库
#include <termios.h> // 终端I/O函数库
int main() {
int fd; // 文件描述符用于串行通信
struct termios options; // 用于存储和配置串行端口设置的结构
unsigned char buffer[256]; // 用于读取串口数据的缓冲区
int bytes_read; // 从串口读取的字节数
fd = open("/dev/ttyUSB0", O_RDWR | O_NOCTTY | O_NDELAY); // 尝试打开串行端口ttyUSB0
if (fd == -1) { // 如果打开失败
perror("Unable to open port"); // 打印错误信息
return 1; // 退出程序
} else {
fcntl(fd, F_SETFL, 0); // 设置文件描述符属性
printf("Port is open.\n"); // 端口打开成功,打印消息
}
tcgetattr(fd, &options); // 获取当前设备的配置
cfsetispeed(&options, B115200); // 设置输入波特率为115200
cfsetospeed(&options, B115200); // 设置输出波特率为115200
options.c_cflag &= ~CSIZE; // 清除数据位
options.c_cflag |= CS8; // 设置数据位为8
options.c_cflag &= ~PARENB; // 无奇偶校验
options.c_cflag &= ~CSTOPB; // 停止位为1
options.c_iflag &= ~(IXON | IXOFF | IXANY); // 不使用软件流控制
options.c_cflag &= ~CRTSCTS; // 不使用硬件流控制
options.c_cflag |= (CLOCAL | CREAD); // 忽略调制解调器的状态线,使能接收
tcsetattr(fd, TCSANOW, &options); // 将修改后的配置应用到设备
printf("Port is configured.\n"); // 打印端口配置完成的消息
while (1) { // 无限循环
tcflush(fd, TCIFLUSH); // 清空输入缓冲区
bytes_read = read(fd, buffer, sizeof(buffer) - 1); // 从串行端口读取数据
if (bytes_read > 0) { // 如果读取到了数据
printf("Received: ");
//定义变量存储数据部分的十六进制字符串
char data_hex[50];
int data_hex_len=0;
for (int i = 0; i < bytes_read; i++) {
printf("%02X ",buffer[i]); // 以16进制打印数据
}
printf("\n");
char code[5];
char code1[5];
sprintf(code, "%c%c", buffer[3], buffer[4]);
sprintf(code1, "%c%c", buffer[5], buffer[6]);
printf("转换后的ASCII码: %s\n", code);
printf("转换后的ASCII码: %s\n", code1);
} else if (bytes_read < 0) {
perror("Error reading from serial port"); // 如果读取时发生错误,则打印错误信息
break; // 跳出无限循环
}
}
close(fd); // 关闭串行端口
return 0; // 退出程序
}6.将接受函数和上云函数结合,上云发布函数修改
/* MQTT 发布消息功能示例, 请根据自己的业务需求进行使用 */
{
char pub_payload[100];
char pub_payload1[100];
char *pub_topic = "/sys/xxxx/xxx/thing/event/property/post";
sprintf(pub_payload , "{\"id\":\"1\",\"version\":\"1.0\",\"params\":{\"wendu\":%s}}",code);
sprintf(pub_payload1 , "{\"id\":\"1\",\"version\":\"1.0\",\"params\":{\"shidu\":%s}}",code1);
res = aiot_mqtt_pub(mqtt_handle, pub_topic, (uint8_t *)pub_payload, (uint32_t)strlen(pub_payload), 0);
res1 = aiot_mqtt_pub(mqtt_handle, pub_topic, (uint8_t *)pub_payload1, (uint32_t)strlen(pub_payload1), 0);
if (res < 0||res1<0) {
printf("aiot_mqtt_sub failed, res: -0x%04X\n", -res);
return -1;
}
}7.修改好后,make编译一下,运行,可以看到温湿度变化

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









