







 本文介绍了自动驾驶决策规划中涉及的优化算法,包括梯度下降法及其在凸优化问题中的应用,并探讨了静态与动态避障的基本原理。通过在满足避障条件的空间内采样寻找最优解,实现路径规划。
本文介绍了自动驾驶决策规划中涉及的优化算法,包括梯度下降法及其在凸优化问题中的应用,并探讨了静态与动态避障的基本原理。通过在满足避障条件的空间内采样寻找最优解,实现路径规划。
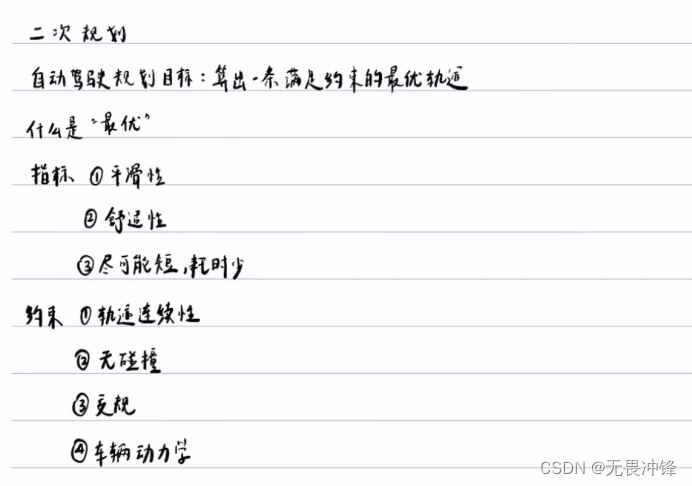
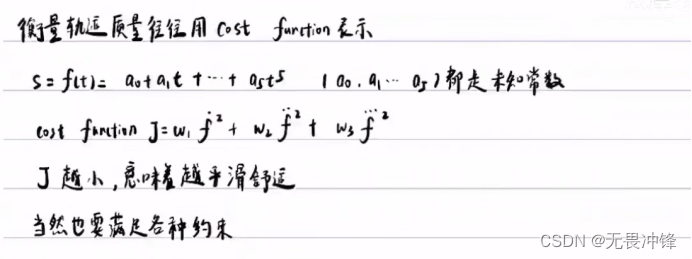
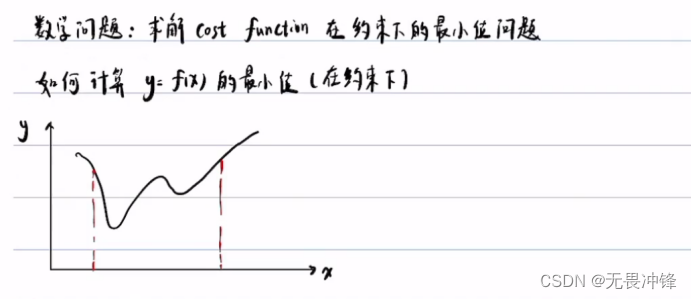
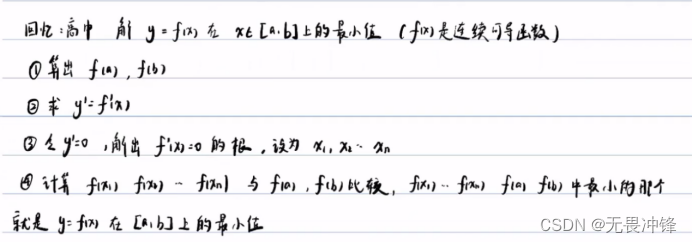
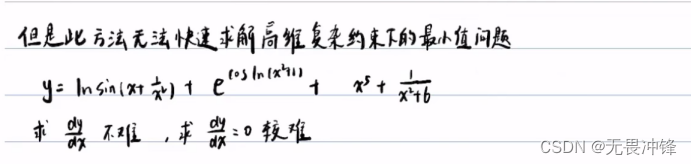
自动驾驶决策规划算法第一章第二节 凸优化与非凸优化
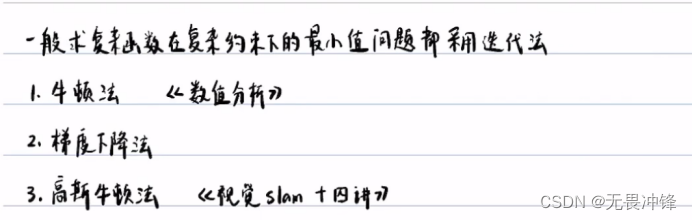
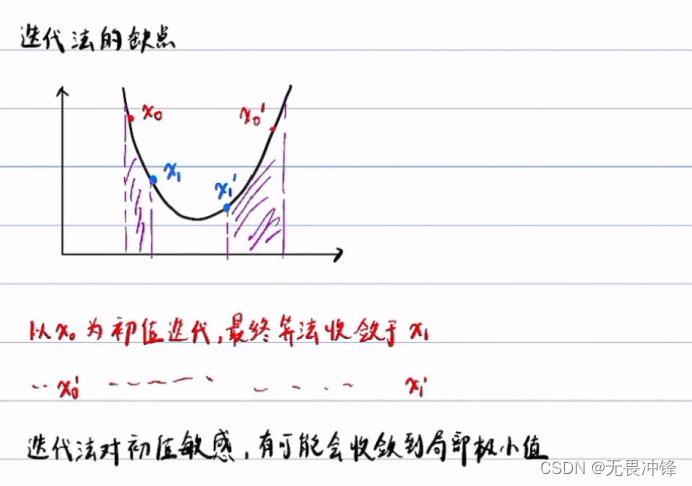
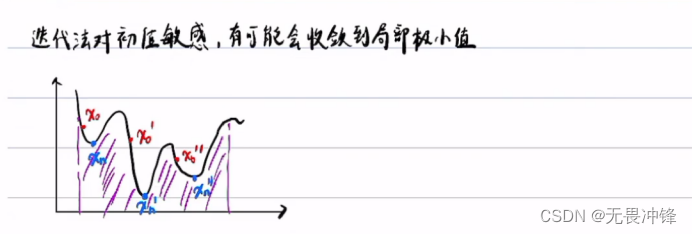
梯度下降法(按每个点一阶导的正负的反方向迭代,如果某个点的一阶导是负的,则下个点取正方向的一个点,反之则取负方向的一个点,迭代的步长取决于导数绝对值的大小)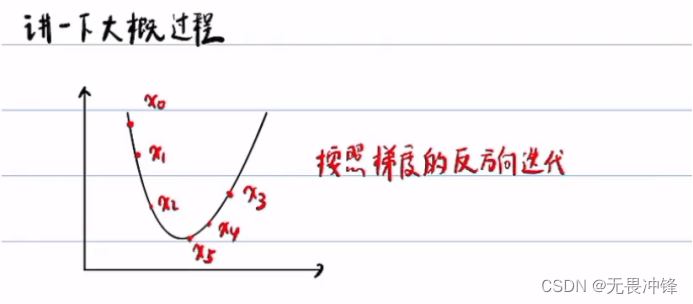
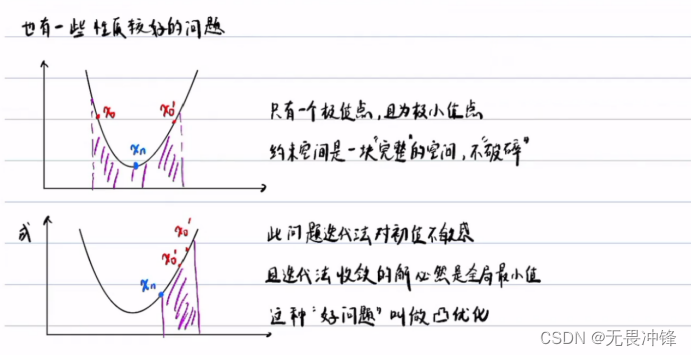
凸优化
凸函数和凸空间:

凸优化:

凸多边形和凹多边形:
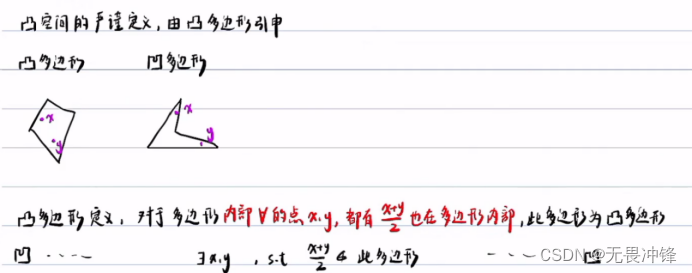
凸空间和非凸空间:


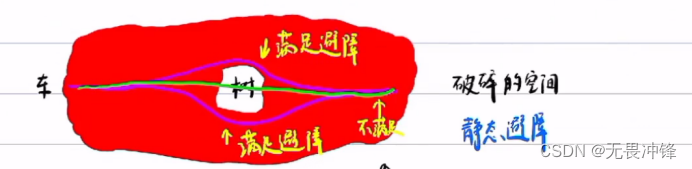
静态避障
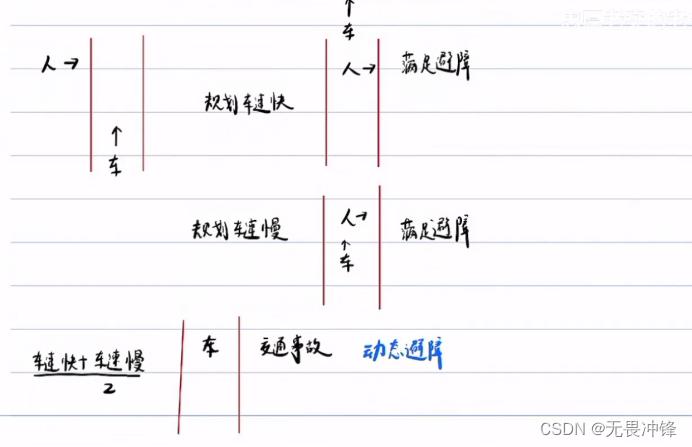
动态避障

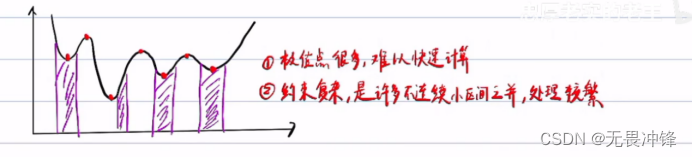
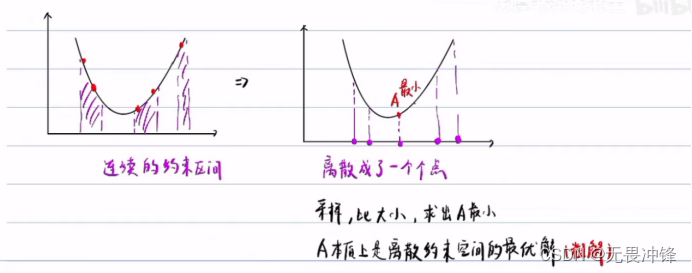
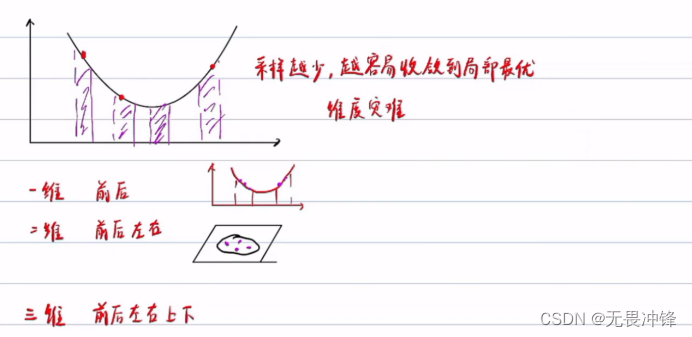
在满足避障的空间进行撒点采样,找到约束条件下的最小值。本质上是连续空间离散化后,离散约束空间的最优解。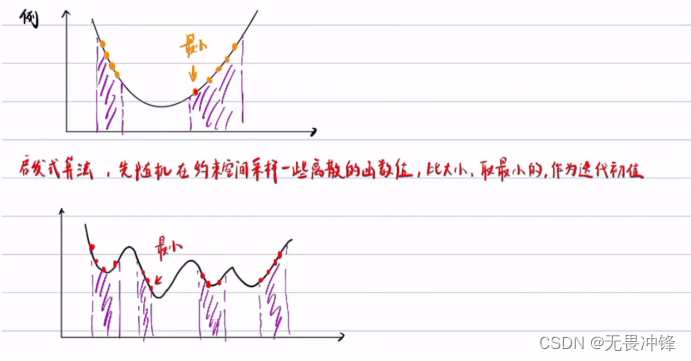


梯度下降法(按每个点一阶导的正负的反方向迭代,如果某个点的一阶导是负的,则下个点取正方向的一个点,反之则取负方向的一个点,迭代的步长取决于导数绝对值的大小)
凸优化
凸函数和凸空间:
凸优化:
凸多边形和凹多边形:
凸空间和非凸空间:
静态避障
动态避障
在满足避障的空间进行撒点采样,找到约束条件下的最小值。本质上是连续空间离散化后,离散约束空间的最优解。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























