






 本文详细介绍了使用MATLAB进行图像增强的实验,包括直方图均衡化和卷积滤波。通过对比原图像与处理后的图像,分析了直方图均衡化如何提升图像对比度和细节,以及不同滤波器对图像平滑度和细节保留的影响。此外,还探讨了低通和高通滤波模板的构造及它们的区别。
本文详细介绍了使用MATLAB进行图像增强的实验,包括直方图均衡化和卷积滤波。通过对比原图像与处理后的图像,分析了直方图均衡化如何提升图像对比度和细节,以及不同滤波器对图像平滑度和细节保留的影响。此外,还探讨了低通和高通滤波模板的构造及它们的区别。
实验四:图像增强技术
通过本实验加深对数字图像增强操作的理解,熟悉MATLAB中的有关函数;了解直方图均衡化和卷积滤波的原理;熟悉低通和高通滤波模板的构造方法。
| 班级 | 姓名 | 实验名 | 完成时间 |
|---|---|---|---|
| 计算2014 | lx | 图像增强技术 | 12.8 |
实验要求:
- 熟悉MATLAB的图像处理函数
- 熟练掌握java/C#/C/C++的图像处理方法
- 完成程序代码编写
1. 直方图均衡化
1.1 观察实验结果,写出和原图像有什么不同之处。
clear;
I = imread('Barbara.tif');
J = histeq(I);
figure; imshow(I)
figure; imshow(J)
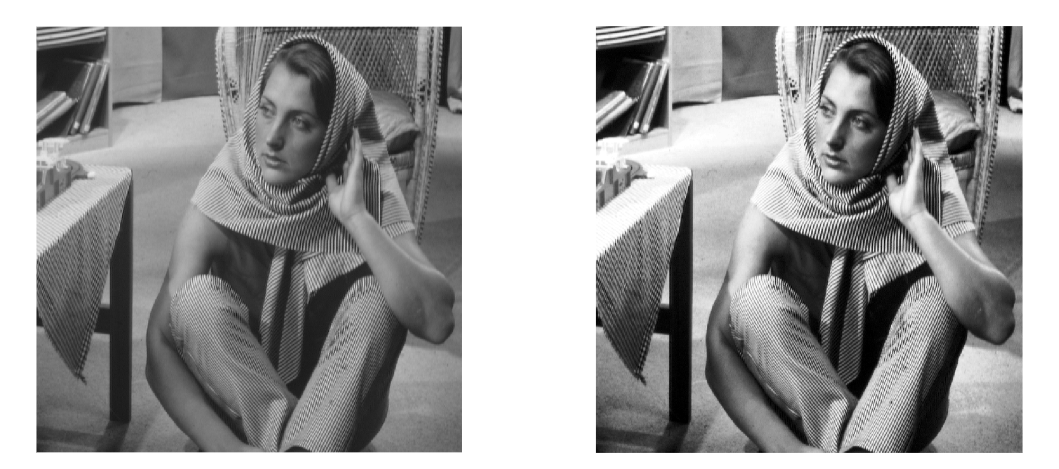
左边是原始图像,右边是直方图均衡化后的图像,可以发现左边的图像看起来有点灰蒙蒙的(好像本来就是黑白照片),右边的图像看起来更清晰、细节更丰富,人物更加分明。
1.2 输入代码,比较I、J两幅图像的差别,写出其原因。
clear;
I=imread('Barbara.tif');
J=histeq(I);
subplot(1,2,1);imhist(I,64)
subplot(1,2,2);imhist(J,64)
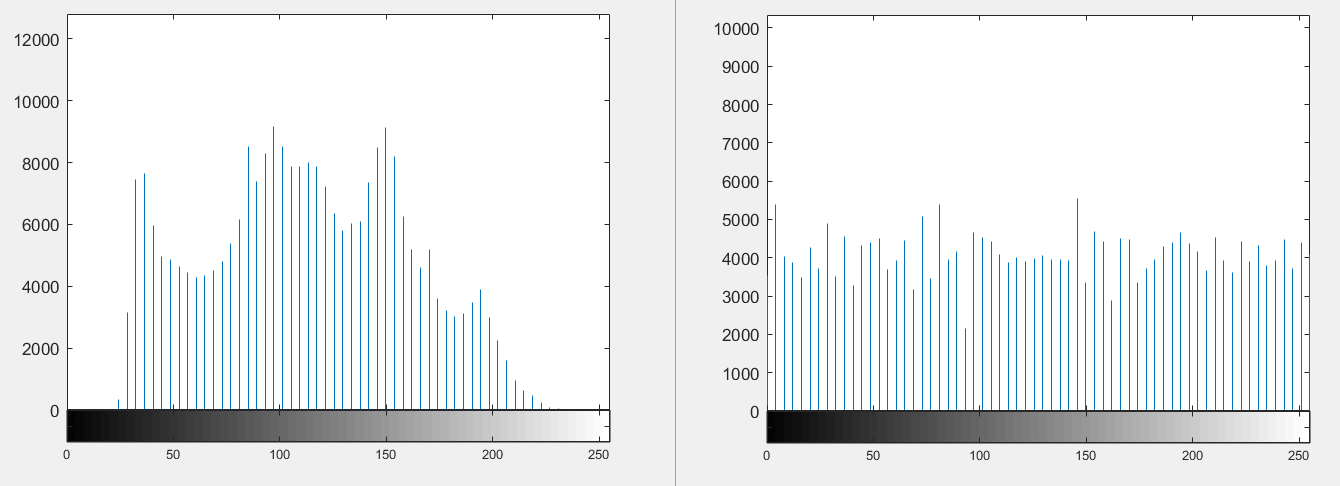
左边的直方图对应了原始图像的灰度等级,右边的直方图对应了经过直方图均衡化后的图像的灰度等级。可以看出左边的原始图像灰度高频和低频信号比较少,灰度主要都集中在中间,所以图像看起来会比较平,缺少层次。
右边的图像灰度直方图范围变大,主要是利用了histeq函数对图像做了均衡化处理,图像的对比度相应也变大。
1.3 将程序中的图像换成其他图像,验证你的说法是否正确。

如图,符合上述的说法。
1.4 画出I、J的直方图,写出两者的差别。
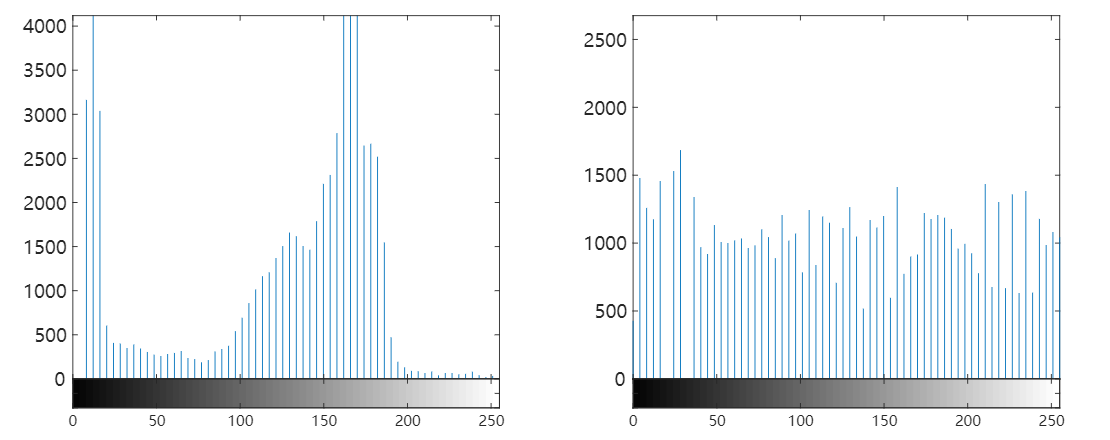
原始图像的直方图主要集中在低频(0~20)和中高频(130~180)之间,右边的图像灰度直方图范围变大,灰度等级均匀分布在0~255之间。
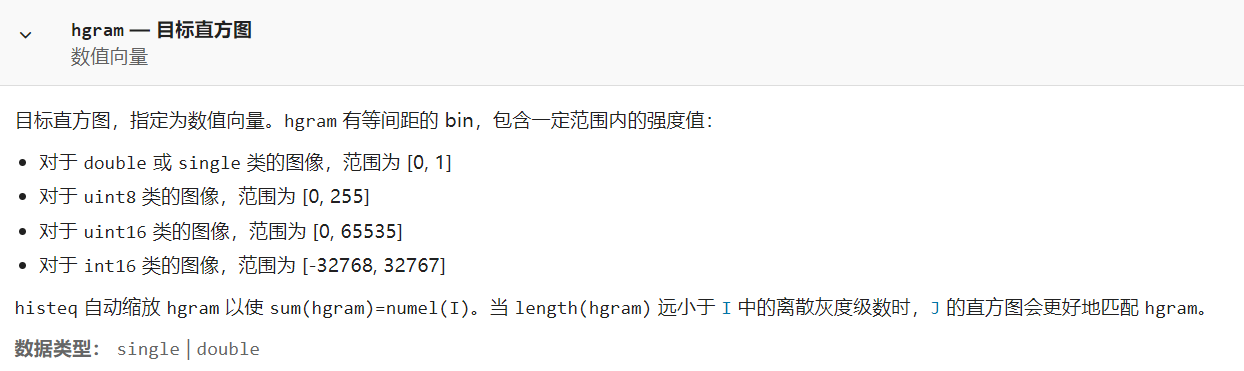
由于本次实验所用图片为uint8格式,所以histeq默认使输出直方图J具有 255 个 bin 的直方图大致平坦。
2. 图像滤波
clear;
I=imread('Lena.tif');
h=ones(5,5)/25;
J=imfilter(I,h);
subplot(1,2,1); imshow(I);
subplot(1,2,2); imshow(J);
2.1 观察实验结果,写出和原图像有什么不同之处。

可以发现,右边的图像比左边的图像变得“模糊”。或者换一种说法,图像整体上变得更加平滑,边缘细节度变低。
2.2 将h分别修改下列的值,观察实验结果,写出产生此现象的原因。
h=ones(3,3)/9;

可以看出,图像同样变得“模糊”了,但是感觉没有2.1中图像模糊。
a=[1 1 1
1 2 1
1 1 1]
h=a/10;

同上,图像与原图几乎看不出差别。
要解释上面的现象,我们先来了解一下imfilter函数。
imfilter有两种用法:
B = imfilter(A,h)使用多维滤波器h对多维数组A进行滤波,并在B中返回结果。B = imfilter(A,h,options,...)根据一个或多个指定的选项执行多维滤波。
我们在本题中采用的是第一种方法,即没有添加控制滤波运算的选项。可以发现,这里多次提到了**“滤波”**,下面我以2.1为例演示一下imfilter的具体流程:
首先,我们人为构造一个滤波器:
h=ones(5,5)/25;
这个滤波器长这样:
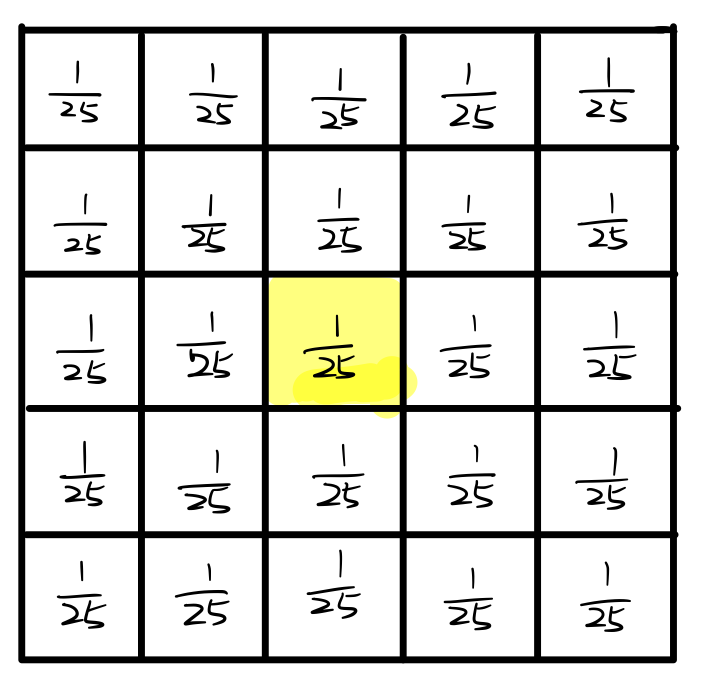
黄色的地方是这个滤波器的中心,然后我们将这个滤波器在原图像矩阵上进行滤波操作,以原图最左上角的值为例,打开matlab中的图像矩阵观察到的值如下:
对于指定偶数大小的核,核的中心为
floor((size(h) + 1)/2),即一个4*4的卷积核,其中心为[1,1]。
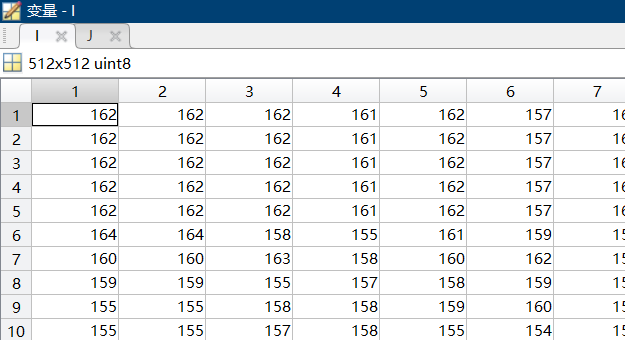
可以发现图像左上角的值均为162,滤波操作如下:
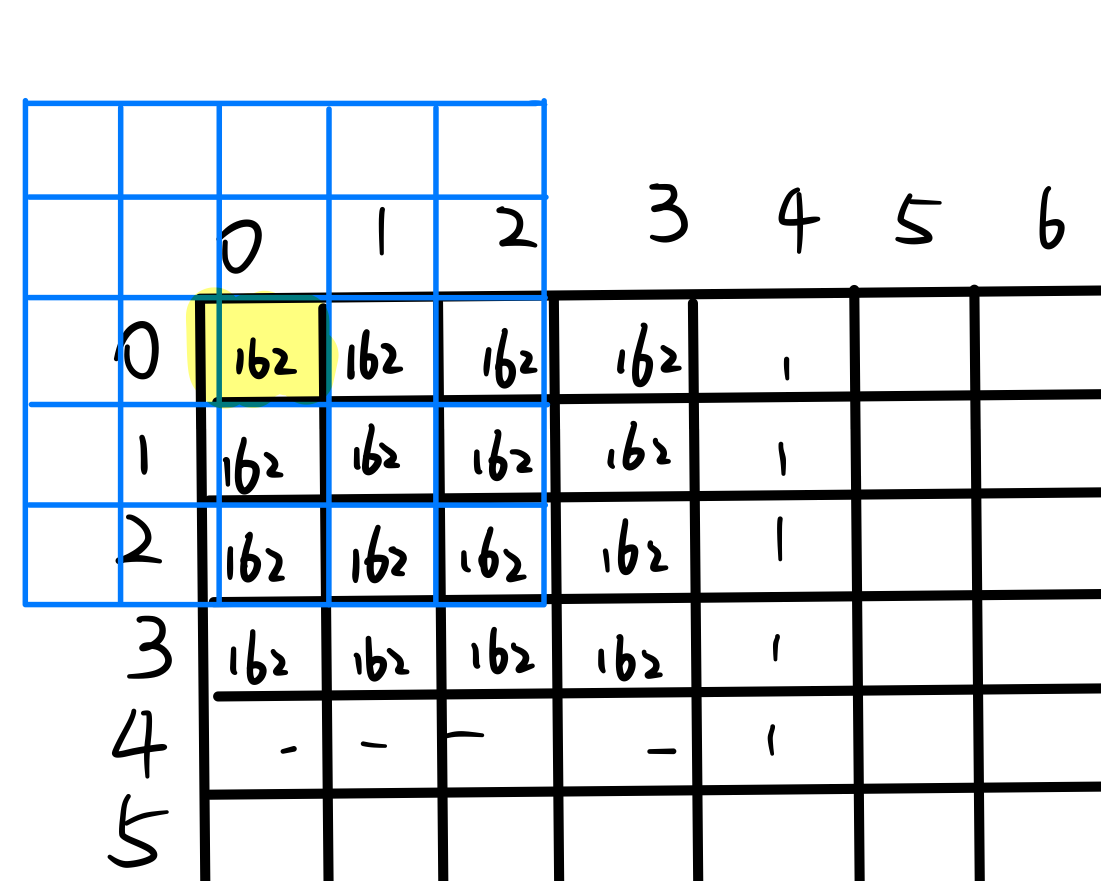
滤波器的中心与图像最左上角重合,然后各值与原图像上的值做积并求和,但是此时滤波器外围并没有图像填充,所以图像要向外填充,如下:
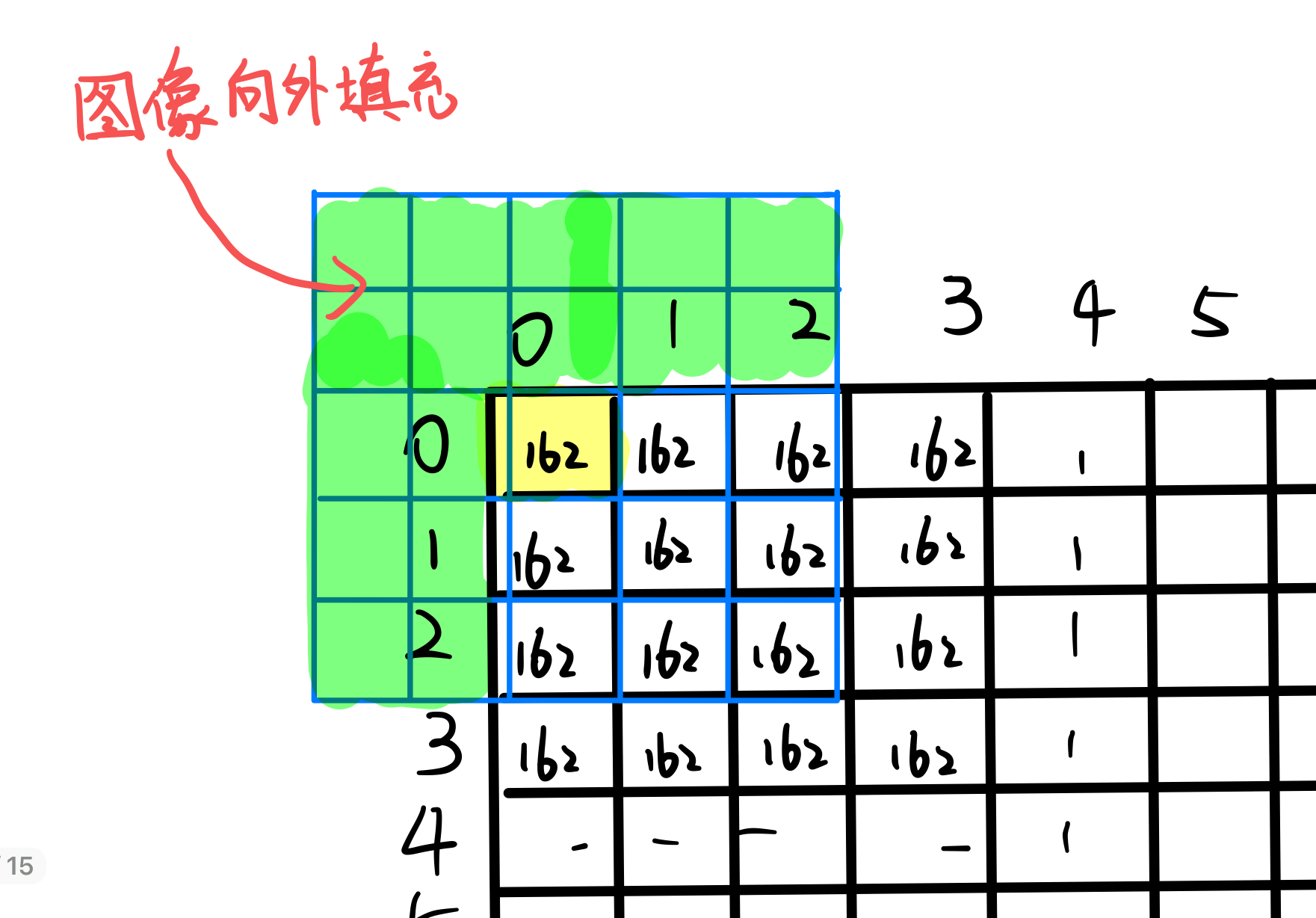
填充值默认为0,滤波器上每个值都为1/25,所以这里第一个值经过滤波后为162/25*9+0/25*16=58.32,由于图像类型为uint8,所以取整为‘58’。然后,滤波器向右移动,继续与图像上第二个值做滤波操作,如下:
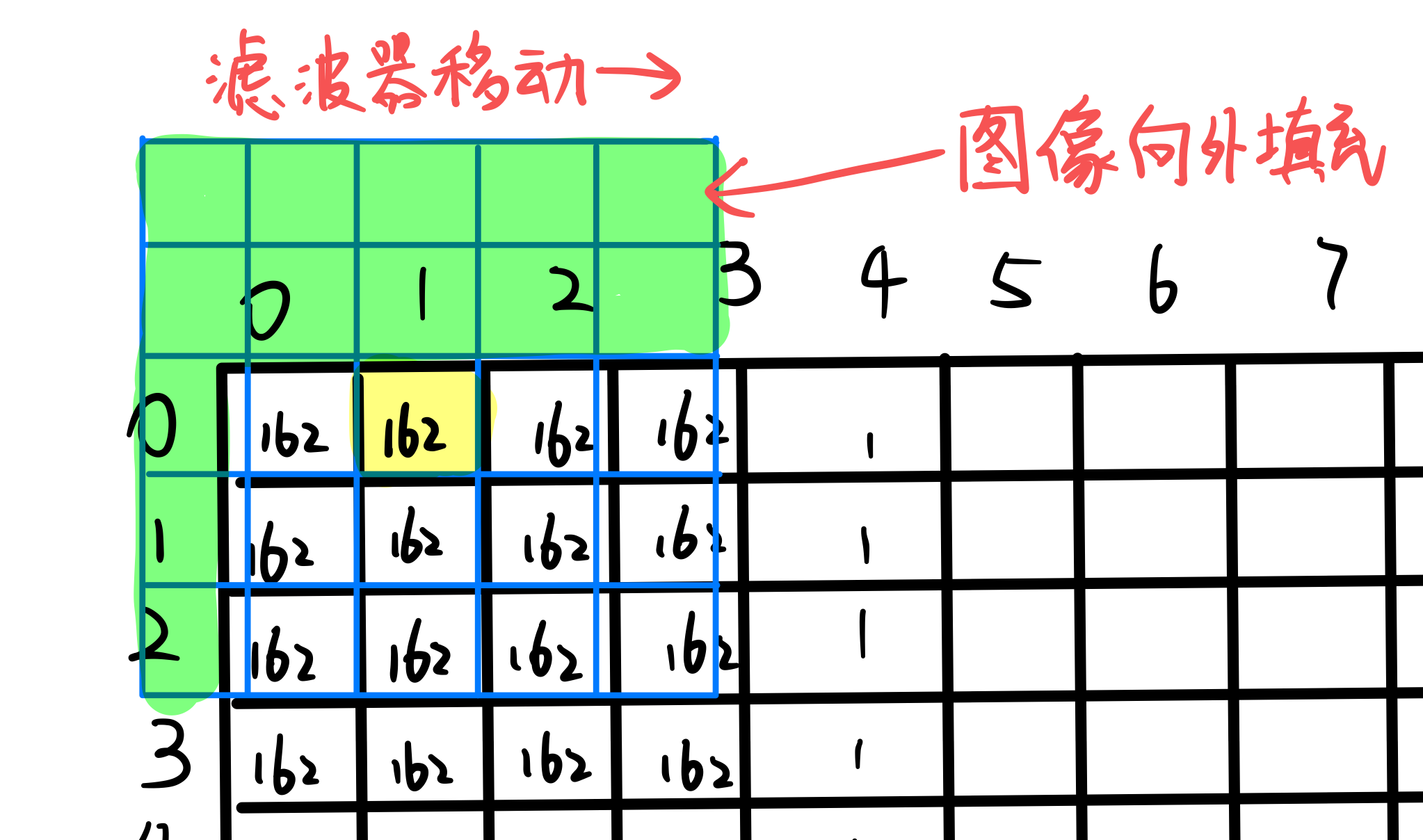
用同样的方法计算得到162/25*12+0/25*13=77.76,向上取整为‘78’,然后,滤波器继续向右移动,当滤波器中心经过图片矩阵第一行所有元素后,跳转到第二行第一个元素继续上述操作。
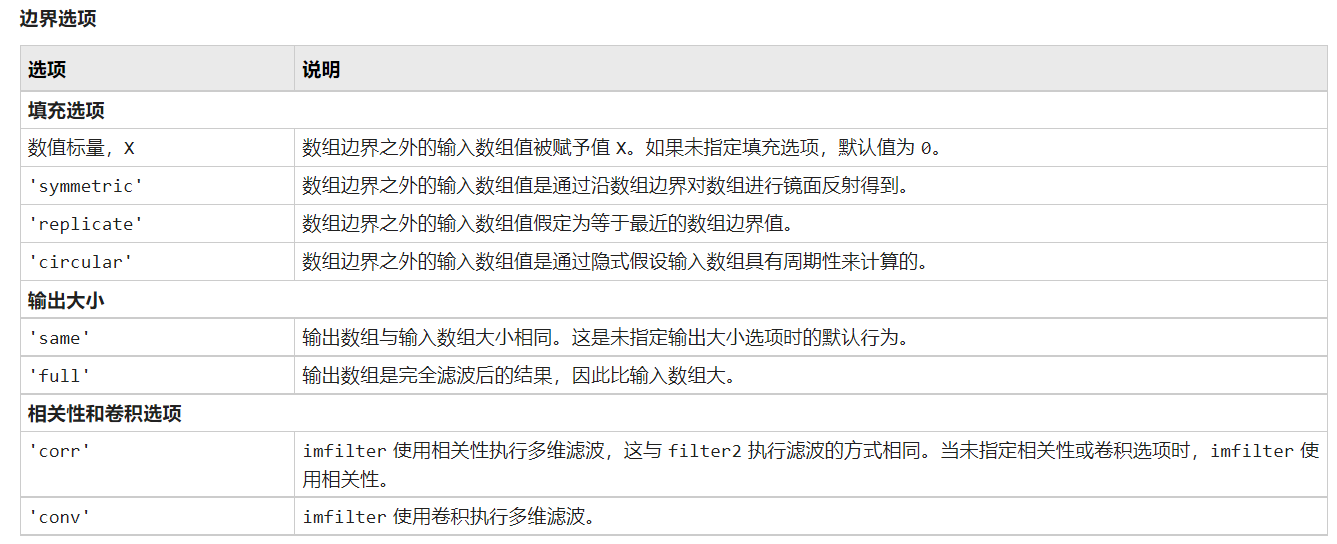
对于第三个操作数options,官方文档给出的所有取值如下:
上述的是滤波器的基本操作,但是对于我们理解这道题有什么帮助呢?
首先,观察构造的5*5的滤波器,可以发现其和为1,且平均分布在滤波器中,作用就是把图像中每个像素的值转换为这个值附近5*5范围内的领域的平均值,也叫做均值滤波。所以,图像相比之前会变得更加平滑,但是细节度降低了很多。
第二个滤波器和第一个滤波器原理一致,但是范围变小了,作用就是把图像中每个像素的值转换为这个值附近3*3范围内的领域的平均值,也是均值滤波,但是由于滤波器减小了将近‘1/3’,所以图像的细节损失并不明显。
第三个滤波器和第二个滤波器基本一致,不同的地方在于中心的值变为了原来的两倍,这也就意味着图像中每个像素领域对该像素值的影响变小了,打个比方,如果图像中原来有这样一个区域:
[100,100,100,
100,200,100,
100,100,100]
其中心值在分别经过第二和第三个滤波器后的结果为100/9*8+200/9=111.1=111,100/10*8+200/5=120,可以发现后者在滤波操作后的变化更小,也就是相比之前的滤波操作保留了更多的细节。
虽然这里两者的差别并不大,但是图像上反映出来的差别却肉眼可见,可联系实验3中DCT变换的内容,图像的信息主要集中在靠近频谱中心的低频信号,所以对低频信号的细微改动都会很大程度上影响到图像。
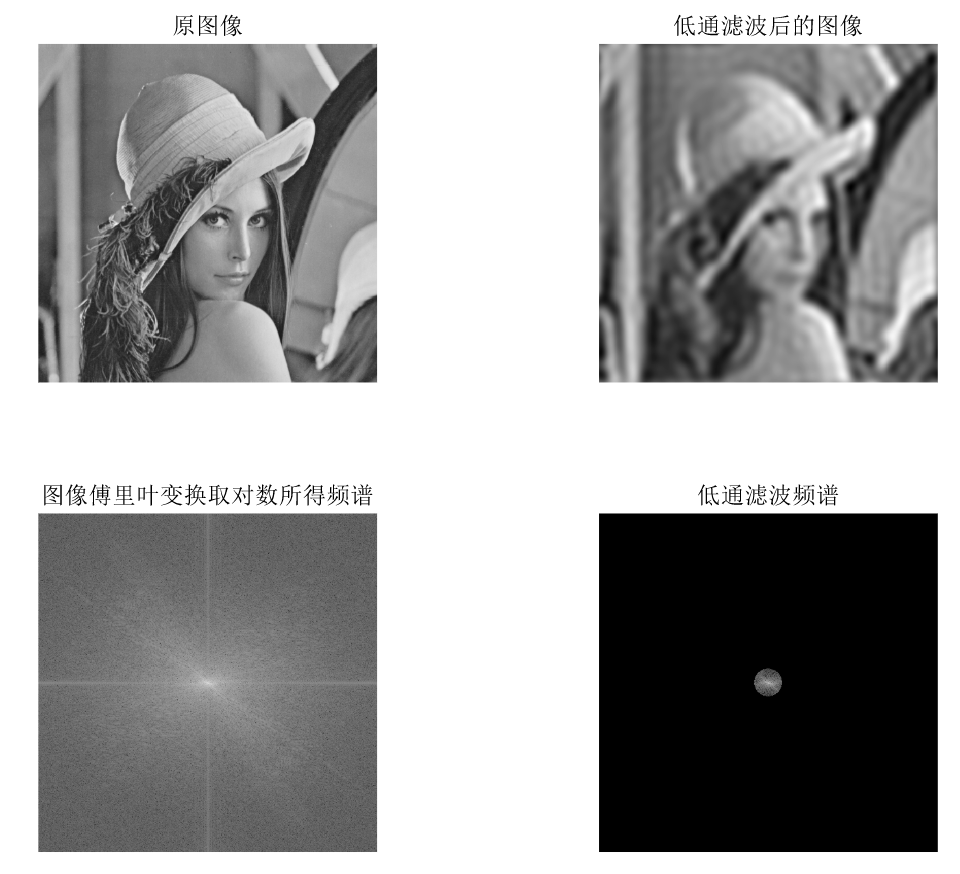
2.3 构造一个低通滤波模板,并加以实现。
clc; clear;
img=imread('Lena.tif');
subplot(2,2,1),imshow(img); title('原图像');
% 将低频移动到图像的中心
s=fftshift(fft2(img));
subplot(2,2,3),imshow(log(abs(s)),[]); title('图像傅里叶变换取对数所得频谱');
[a,b] = size(img); low_filter = LowFil(a,b,s); % low_filter就是低通滤波器
subplot(2,2,4),imshow(log(abs(low_filter)),[]); title('低通滤波频谱');
new_img = uint8(real(ifft2(ifftshift(low_filter))));
subplot(2,2,2),imshow(new_img,[]); title('低通滤波后的图像');
% Parameters:
% H: 低通滤波器
% u_max: 图像第一维的长度
% v_max: 图像第二维的长度
% s:
function [H] = LowFil(u_max, v_max, s)
% 计算图像中心点坐标以及截止频率D0
center_u = floor(u_max/2);
center_v = floor(v_max/2);
D0 = min(center_u,center_v)/12;
D0 = D0^2;
% 初始化
H=zeros(u_max, v_max);
for u=1:u_max
for v=1:v_max
% (u, v)和中心点间的距离
dist = (u - center_u)^2 + (v - center_v)^2;
% 判断是否要截止
if(dist<=D0)
h = 1;
else
h = 0;
end
H(u, v) = h * s(u, v);
end
end
使用函数fft2将空间图像进行二维傅里叶变换后,转化到频域上,我们可以得到这个图像每个像素的相位和幅度值,对于相位而言,代表着图像中的位置形状信息,一般情况下我们不对其做处理,否则可能就无法恢复出原始图像的形状。
而幅度值则主要代表着能量的大小,也就是每一个频率上的能量大小。由于本题中我们要构造低通滤波器,即去除图像的高频部分,公式如下:
H
(
u
,
v
)
=
{
1
D
(
u
,
v
)
≤
D
0
,
0
D
(
u
,
v
)
>
D
0
H(u,v)= \begin{cases} 1 ~~~~D(u,v)\leq D0, \\ 0 ~~~~D(u,v)>D0 \end{cases}
H(u,v)={1 D(u,v)≤D0,0 D(u,v)>D0
D0为截止频率,H(u,v)即为滤波器
G ( u , v ) = H ( u , v ) F ( u , v ) G(u,v)=H(u,v)F(u,v) G(u,v)=H(u,v)F(u,v)
F(u,v)为经过傅里叶变换后的频域图,G(u,v)为低通滤波频谱图。
需要注意的是,在进行傅里叶变换(fft2)后,低频部分集中分布在四个角落,通过移位(fftshift)之后,将其集中到图像的中心,这只是为了便于处理。当我们对幅值进行处理后,再进行反移位(ifftshift)恢复到原始的分布情况,
Y = fftshift(X)通过将零频分量移动到数组中心,重新排列傅里叶变换X。如果
X是矩阵,则fftshift会将X的第一象限与第三象限交换,将第二象限与第四象限交换。
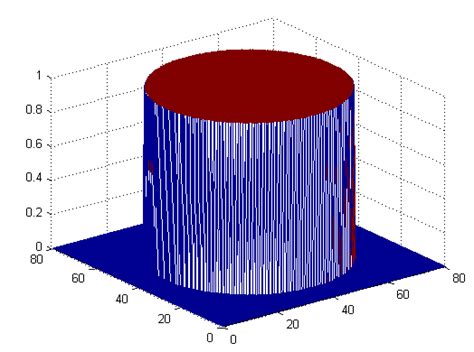
之后结合相位计算出每个像素对应的值。对其进行傅里叶反变换(ifft)后,就可以恢复出时域图像,此时的图像就是经过低通滤波器处理后的图像了,如下:
需要注意,在经过傅里叶变换后,频域部分为复数,即使在傅里叶逆变换后,也没有变为实数,只是将复数部分变为0,所以最好要加一个real()函数,将频域图转为实数,不转的话会有如下警告。
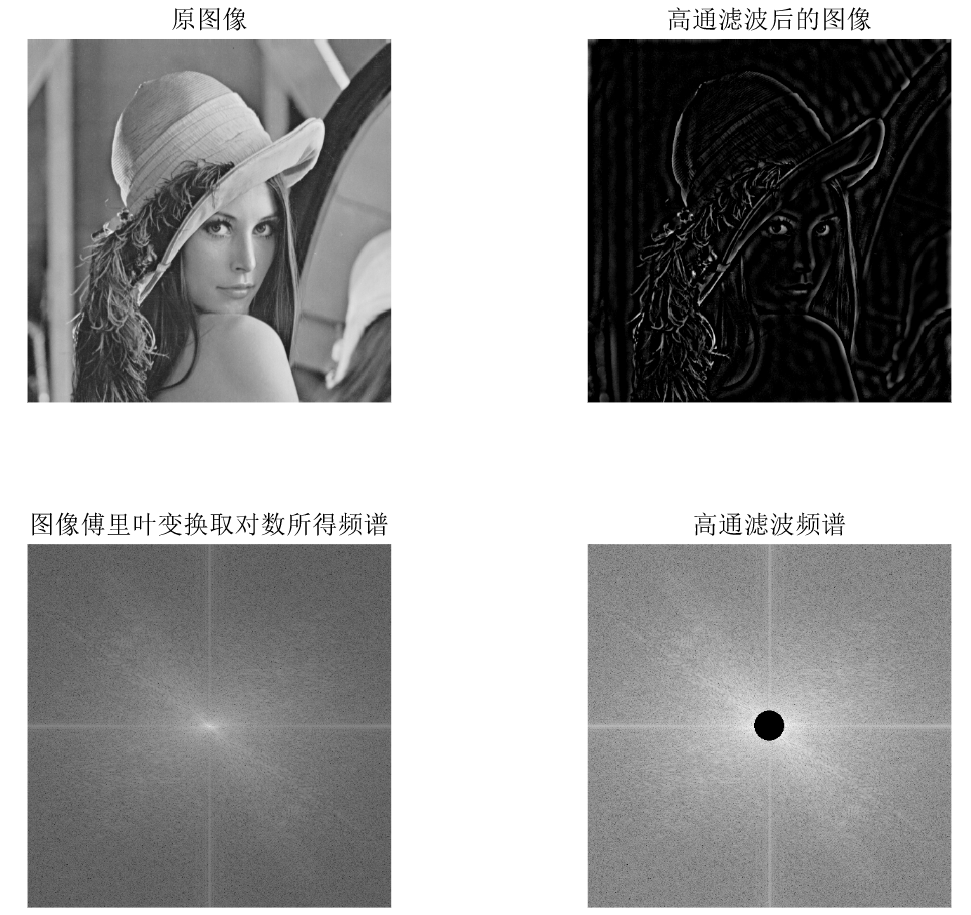
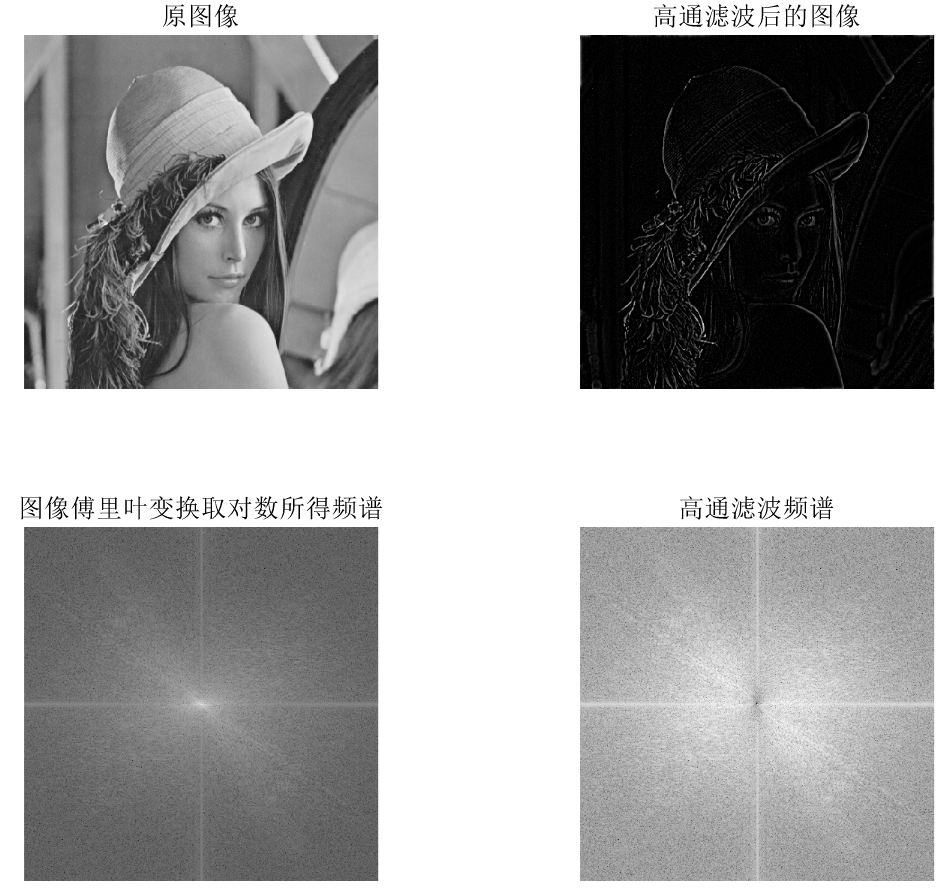
2.4 构造2—3个高通滤波模板,并加以实现,和低通滤波的效果加以对比,写出高通滤波和低通滤波的差别,并写出低通滤波模板、高通滤波模板构造的规律。
首先是最简单的高通滤波,直接在上一道题的基础上改动一下:
for u=1:u_max
for v=1:v_max
% (u, v)和中心点间的距离
dist = (u - center_u)^2 + (v - center_v)^2;
% 判断是否要截止
if(dist<=D0)
h = 0;
else
h = 1;
end
H(u, v) = h * s(u, v);
end
end
只要将原来的截止频率的判断改变一下,就成为了一个理想高通滤波器:
H
(
u
,
v
)
=
{
0
D
(
u
,
v
)
≤
D
0
,
1
D
(
u
,
v
)
>
D
0
H(u,v)= \begin{cases} 0 ~~~~D(u,v)\leq D0, \\ 1 ~~~~D(u,v)>D0 \end{cases}
H(u,v)={0 D(u,v)≤D0,1 D(u,v)>D0
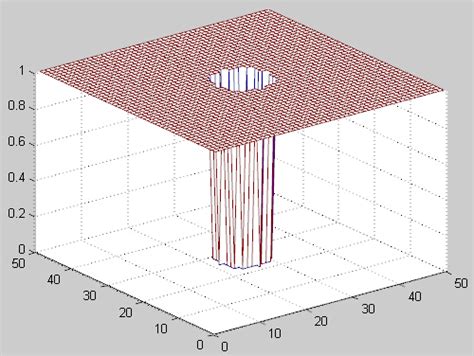
其余部分不用改变,生成的图片如下:
接着实现比较复杂的高通滤波器,这里以高斯高通滤波器为例,公式如下:
H
(
u
,
v
)
=
1
−
e
−
D
2
(
u
,
v
)
/
2
D
0
2
H(u,v)=1-e^{-D^{2}(u,v)/2D^2_0}
H(u,v)=1−e−D2(u,v)/2D02
for u=1:u_max
for v=1:v_max
d = ((u-center_u)^2+(v-center_v)^2);
H(u,v) = 1 - exp(-(d)/(2*(D0^2)));
end
end
H = H .* s;
其余部分基本没有变动。
总的来说,模板构造显然是有规律的,主要步骤如下:
- 将空间图像进行傅里叶变换转换为频域图,然后移位处理,将低频部分集中到图像中心。
- 对频域图做滤波处理(自己编写滤波器)
- 将滤波后的频域图进行反移位,傅里叶逆变换,恢复成原始图像。
3. 编程实现直方图均衡化函数(histeq)和卷积滤波函数(imfilter)
直方图均衡化:
#include<opencv2\opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
Mat hist(Mat &image) {
double gray[256] = { 0 };
Mat temp = Mat(image.rows, image.cols, CV_8UC1);
for (int i = 0; i < image.rows; i++) {
for (int j = 0; j < image.cols; j++) {
int k = image.at<uchar>(i, j);
gray[k]++;
}
}
for (int x = 0; x < 256; x++) {
gray[x] = (double)gray[x] / (image.rows*image.cols);
}
for (int m = 0; m < 256; m++) {
gray[m + 1] = gray[m + 1] + gray[m];
}
for (int a = 0; a < image.rows; a++) {
for (int b = 0; b < image.cols; b++) {
int k = image.at<uchar>(a, b);
temp.at<uchar>(a, b) = (uchar)(255 * gray[k] + 0.5);
}
}
imshow("hist", temp);
return temp;
}
void main() {
Mat image1 = imread("H:/大三上/数字信号/实验4/input/Cameraman.tif", 0);
imshow("Origin",image1);
hist(image1);
waitKey(0);
getchar();
}
效果如下:

卷积滤波函数:
#include <iostream>
#include <math.h>
#include<opencv2\opencv.hpp>
using namespace std;
using namespace cv;
void Sharpen(const Mat& myImage, Mat& Result)
{
CV_Assert(myImage.depth() == CV_8U); //判断函数CV_Assert
const int nChannels = myImage.channels();
for (int j = 1; j < myImage.rows - 1; ++j)
{
const uchar* precious = myImage.ptr<uchar>(j - 1); //当前像素上一行指针
const uchar* current = myImage.ptr<uchar>(j); //当前像素行指针
const uchar* next = myImage.ptr<uchar>(j + 1); //当前像素下一行指针
uchar* output = Result.ptr<uchar>(j);
//利用公式和该中心点邻域的8个像素对当前像素值进行处理
for (int i = nChannels; i < nChannels * (myImage.cols - 1); ++i)
{
// 3*3的均值滤波器
*output++ = saturate_cast<uchar>
(floor((current[i] + current[i - nChannels] + current[i + nChannels]
+ precious[i] + precious[i - nChannels] + precious[i + nChannels]
+ next[i] + next[i - nChannels] + next[i + nChannels])/9.0));
}
}
Result.row(0).setTo(Scalar(0)); //设置第一行所有元素值为0
Result.row(Result.rows - 1).setTo(Scalar(0)); //设置最后一行所有元素值为0
Result.col(0).setTo(Scalar(0)); //设置第一列所有元素值为0
Result.col(Result.cols - 1).setTo(Scalar(0)); //设置最后一列所有元素值为0
}
void main()
{
Mat srcImg = imread("H:/大三上/数字信号/实验4/input/Cameraman.tif", 0);
imshow("Src", srcImg);
Mat dstImg;
dstImg.create(srcImg.size(), srcImg.type());
Sharpen(srcImg, dstImg);
imshow("Dst",dstImg);
waitKey(0);
}
上述代码使用了3*3的均值滤波器对图像进行滤波处理,算法和2.3题讲解的一致,效果如下图:
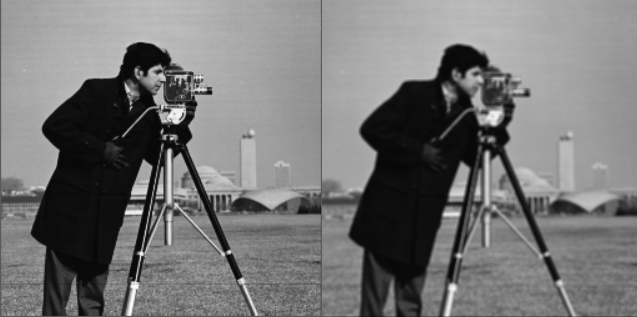
可以看出右边的图像相比左边的图像变得更加模糊。
总结
本次实验对于我理解图像增强起到了很大的帮助,尤其是图像滤波哪个部分,在查阅了很多的文献后,发现滤波器的构造方法有规律可循的时候,内心还是比较激动的。当然,实验中也出现了很多的问题,在实现最后一问卷积滤波函数的时候,其实还是有不足的地方,没办法自定义滤波器,其实可以再花一些时间写个自定义滤波器的函数,但是由于期末时间比较紧张,留给我自由发挥的时间比较有限,所以便不了了之了。
总的来说,本次实验很好地激发了我对图像增强的兴趣,希望我以后有时间可以静下心来做一些这方面的研究。



















 5101
5101

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











