






51单片机驱动器控制步进电机

文章简介
本文是前段时间玩步进电机精准控制的总结,关于51单片机驱动步进电机的程序(用脉冲频率控制)及接线方法。
1.驱动器简介
如图所示,以下为两相电机驱动器实物图,ENA+为驱动器使能信号+,ENA-为驱动器使能信号-。PUL+是脉冲信号+,PUL-是脉冲信号-。DIP是方向信号。 DC接供电电源,电压为24V~42V。

2.驱动器和单片机接线方法
驱动器上A+、A-、B+、B-端通过电机上说明,按照颜色接即可。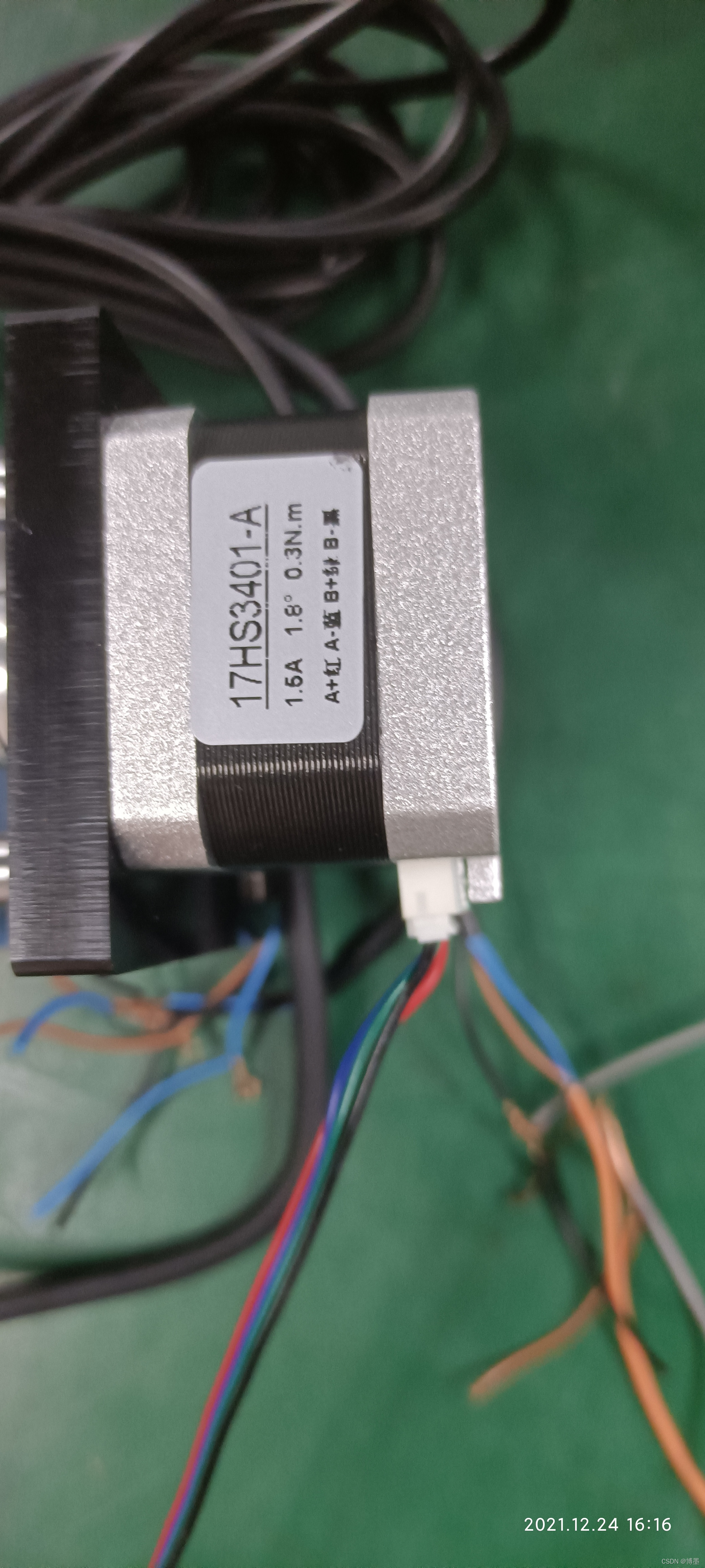

这里是驱动器拨码开关的图

3.单片机程序
| 程序通过用按键控制发送的脉冲频率,通过发送脉冲,给驱动器口PUL驱动电机, 通过按键来控制发送 500 个脉冲,精准控制步进电机在直尺上转动 1cm 。 |
按键一功能是发送500个脉冲,从而精准控制一厘米,为什么是发送500个脉冲,是因为驱动器可以通过拨动开关调电流,调细分,我用的是200个脉冲转一圈的状态,经过调试200个脉冲刚好转动0.4厘米,经过换算,500个脉冲为1厘米,所以实现精准控制1厘米,同理可得,其他距离的脉冲数。
按键二的功能为使电机反转,通过转换引脚电平,给驱动器DIR口状态取反,DIR控制电机正方转,故按键二控制电机方向。
两个外部中断是响应接近开关,使电机转换方向,防止电机超过限位。
#include <stc15f2k60s2.h>
#include <intrins.h>
#define u8 unsigned char
#define u16 unsigned int
unsigned int h; //无符号整形变量
sbit maichong=P1^1; //定义脉冲输出脚(PUL)
sbit zhuang=P0^3; //定义方向引脚(DIR)
sbit K1=P2^0; //脉冲发送
sbit K2=P2^1; //转向
sbit K3=P2^2; //调试按键,调试中断是否能进入,可注释掉
sbit right=P3^2 //右限位
sbit left=P3^3; //左限位
sbit yuan=P0^2; //坐标原点
/**CSDN博墨**************************************/
/********CSDN博墨********************************/
/****************CSDN博墨************************/
/*************************CSDN博墨***************/
/**********************************CSDN博墨******/
void Delay400us() //400微秒延时函数
{
unsigned char i, j;
i = 5;
j = 74;
do
{
while (--j);
} while (--i);
}
void Delay10ms() //10毫秒延时函数
{
unsigned char i, j;
i = 108;
j = 145;
do
{
while (--j);
} while (--i);
}
void right_EXINT0() interrupt 0 //外部中断函数0
{
if(right==1)
{
Delay10ms();
if(right==1)
{
zhuang=~zhuang;
}
}
}
void left_EXINT1() interrupt 2 //外部中断函数1
{
if(left==1)
{
Delay10ms();
if(left==1)
{
zhuang=~zhuang;
}
}
}
void EXINT_init() //外部中断初始化
{
IT0=0;
IT1=0;
IE0=0;
IE1=1;
EA =1;
EX0=1;
EX1=1;
}
void main () //主函数
{
EXINT_init();
P0M0=0XFF;
P0M1=0X00;
while(1)
{
if (K1==0) //按键1判断
{
Delay10ms(); //延时
if (K1==0)
{
for(h=0;h<500;h++)//for 循环500次,发送500个脉冲
{
maichong=0;
Delay400us();
maichong=1;
Delay400us();
}
}
}
if (K2==0) //判断按键2
{
Delay10ms(); //延时
if (K2==0)
{
zhuang=~zhuang; //引脚状态取反
while(K2==0); //判断是否松开按键
}
}
if(K3==0)
{
if(K3==0)
{
P1=0X00;
}
}
else{
P1=0Xff;
}
}
}
/**CSDN博墨**************************************/
/********CSDN博墨********************************/
/****************CSDN博墨************************/
/*************************CSDN博墨***************/
/**********************************CSDN博墨******/
4.实物演示视频
51单片机驱动器控制步进电机
以上是之前程序调试完的视频,文章中如果有错误的地方,欢迎各位大佬指正。

















 4982
4982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









