







前言:在前面我有文章介绍了关于单片机的SPI外设CUBEMX配置,但是要想使用好SPI这个外设我们还必须对其原理性的时序有一个详细的了解,所以这篇文章就补充一下SPI比较偏向底层的时序性的逻辑。
1,SPI简介
SPI是MCU最常见的对外通信口之一,由摩托罗拉在上世纪80年代中开发,用于嵌入式系统中器件之间的短距离数据通信,标准模式使用四条信号线。目前常见的应用器件有:LCD模组、以太网模块、SPI串行Flash和很多传感器等,大部分SD卡都具有SPI操作模式
其采用主从模式(Master Slave)架构:支持多 slave 模式应用,般仅支持单 Master。时钟由 Master 控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB frst):SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几 Mbps 的水平。
总结一下关键特点:
-
同步通信:通信双方共享一个时钟信号
-
全双工传输:支持同时发送与接收
-
速度快:常见支持几MHz甚至几十MHz
-
多从机支持:主机通过CS片选控制多个从设备
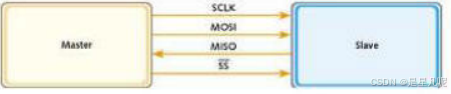
2,SPI的物理接口
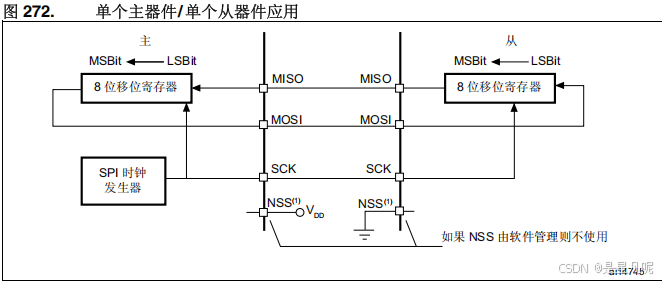
文章上面第一个章节我们有提到SPI的标准模式使用四条信号线,比如下面这个图,其中的CSS片选线如果只有一个从机就可以忽略不计(单从机也就是说可以使用三根线),如果有多个从机那么CSS片选线的数量等于从机的数量

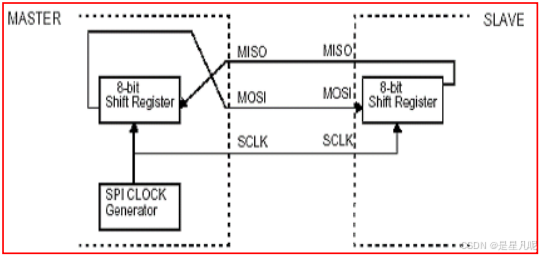
主从机内部结构简化图:
3,SPI通信原理详解
按照时钟极性和相位(CPOL & CPHA)可以将SPI协议分成4种模式:

值得注意的是:发送和接收必须使用相同的时钟配置,否则会出现数据偏移或失真。
详细的4种模式的时序示意图: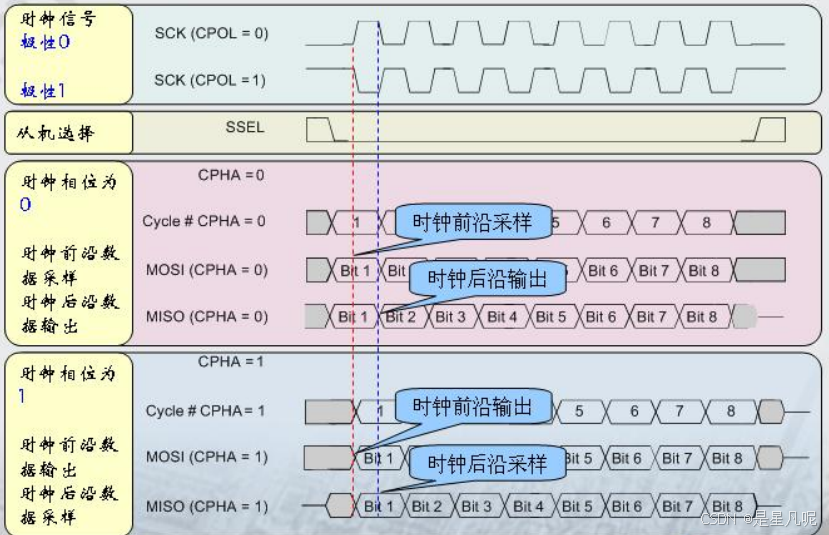
4,MCU中的SPI外设结构
以 STM32 MCU 为例,SPI模块一般包括以下部分:
-
寄存器控制:用于配置波特率、主从模式、CPOL/CPHA等参数
-
TX/RX 缓冲器:发送与接收使用各自的 FIFO
-
状态寄存器:可判断是否发送完成、是否接收到数据等
-
中断控制:可设置中断方式发送/接收
-
DMA支持:支持高速数据传输而不占用CPU
常用寄存器:
-
SPI_CR1:控制寄存器(如主从、CPOL、CPHA) -
SPI_SR:状态寄存器(如TXE/RXNE位) -
SPI_DR:数据寄存器(发送/接收)
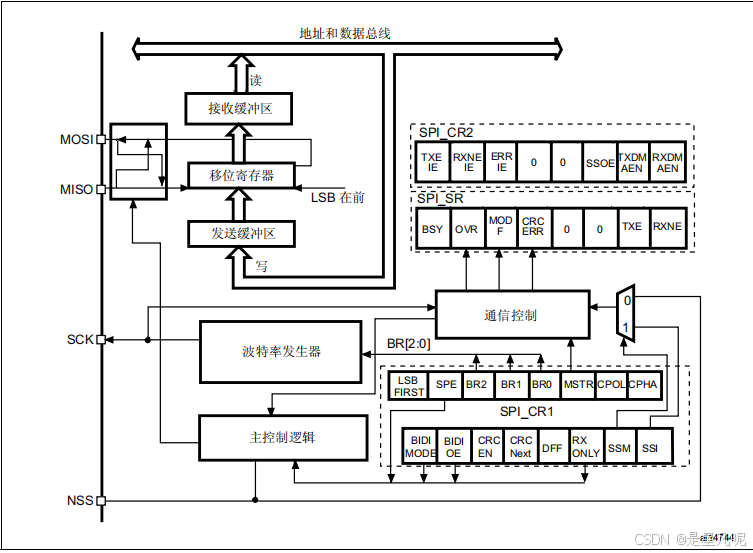
当然,想了解MCU的SPI外设的特性,主要还是得看对应某一款芯片的参考手册。下面就以STM32F4的参考手册为例。
SPI框图:
5,基于STM32G474的SPI配置示例
都是CUBEMX生成的,大家看看参考一下就可以了。。。
spi.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file spi.c
* @brief This file provides code for the configuration
* of the SPI instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "spi.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
SPI_HandleTypeDef hspi1;
DMA_HandleTypeDef hdma_spi1_tx;
DMA_HandleTypeDef hdma_spi1_rx;
// #define SPI_DMA_BUFFER_SIZE 16
// uint8_t spi_tx_buffer[SPI_DMA_BUFFER_SIZE];
// uint8_t spi_rx_buffer[SPI_DMA_BUFFER_SIZE];
/* spi1 init function */
void MX_SPI1_Init(void)
{
/* USER CODE BEGIN spi1_Init 0 */
/* USER CODE END spi1_Init 0 */
/* USER CODE BEGIN spi1_Init 1 */
/* USER CODE END spi1_Init 1 */
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_16BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi1.Init.CLKPhase = SPI_PHASE_2EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_8;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 7;
hspi1.Init.CRCLength = SPI_CRC_LENGTH_DATASIZE;
hspi1.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(spiHandle->Instance==SPI1)
{
/* USER CODE BEGIN SPI1_MspInit 0 */
/* USER CODE END SPI1_MspInit 0 */
/* SPI1 clock enable */
__HAL_RCC_SPI1_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_DMA1_CLK_ENABLE();
/**SPI1 GPIO Configuration
PB5 ------> SPI1_SCK
PB6 ------> SPI1_MISO
PB7 ------> SPI1_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN SPI1_MspInit 1 */
/* SPI1 interrupt Init */
HAL_NVIC_SetPriority(SPI1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(SPI1_IRQn);
/* USER CODE END SPI1_MspInit 1 */
}
}
void HAL_SPI_MspDeInit(SPI_HandleTypeDef* spiHandle)
{
if(spiHandle->Instance==SPI1)
{
/* USER CODE BEGIN SPI1_MspDeInit 0 */
/* USER CODE END SPI1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_SPI1_CLK_DISABLE();
/**SPI1 GPIO Configuration
PB5 ------> SPI1_SCK
PB6 ------> SPI1_MISO
PB7 ------> SPI1_MOSI
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7);
/* SPI1 interrupt Deinit */
HAL_NVIC_DisableIRQ(SPI1_IRQn);
/* USER CODE BEGIN SPI1_MspDeInit 1 */
/* USER CODE END SPI1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1)
{
// printf("SPI1 DMA Transfer Completed!\r\n");
}
}
/* USER CODE END 1 */
spi.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file spi.h
* @brief This file contains all the function prototypes for
* the spi.c file
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __SPI_H__
#define __SPI_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern SPI_HandleTypeDef hspi1;
extern DMA_HandleTypeDef hdma_spi1_tx;
extern DMA_HandleTypeDef hdma_spi1_rx;
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
void MX_SPI1_Init(void);
/* USER CODE BEGIN Prototypes */
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __SPI_H__ */
完结。。。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











