







C++基于多设计模式下的同步&异步日志系统day5
📟作者主页:慢热的陕西人
🌴专栏链接:C++基于多设计模式下的同步&异步日志系统
📣欢迎各位大佬👍点赞🔥关注🚓收藏,🍉留言
主要内容完成双缓冲区异步任务处理器,日志器模块异步工作器设计与实现。

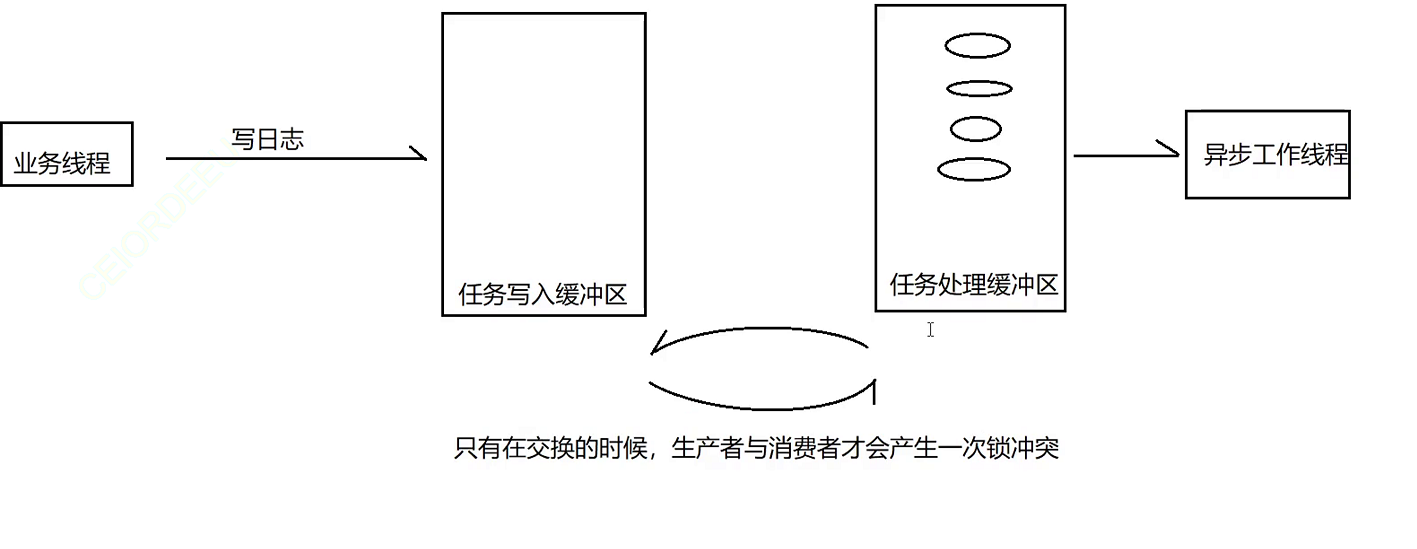
1.双缓冲区异步任务处理器(AsyncLooper)设计
设计思想:异步处理线程+数据池
使⽤者将需要完成的任务添加到任务池中,由异步线程来完成任务的实际执⾏操作
任务池的设计思想:双缓冲区阻塞数据池
优势:避免了空间的频繁申请释放,且尽可能的减少了⽣产者与消费者之间锁冲突的概率,提⾼了任务处理效率
在任务池的设计中,有很多备选⽅案,⽐如循环队列等等,但是不管是哪⼀种都会涉及到锁冲突的情况,因为在⽣产者与消费者模型中,任何两个⻆⾊之间都具有互斥关系,因此每⼀次的任务添加与取出都有可能涉及锁的冲突,⽽双缓冲区不同,双缓冲区是处理器将⼀个缓冲区中的任务全部处理完毕后,然后交换两个缓冲区,重新对新的缓冲区中的任务进⾏处理,虽然同时多线程写⼊也会冲突,但是冲突并不会像每次只处理⼀条的时候频繁(减少了⽣产者与消费者之间的锁冲突),且不涉及到空间的频繁申请释放所带来的消耗。
- 单个缓冲区的进一步设计
设计一个缓冲区:直接存放格式化后的日志消息字符串
好处:
1.减少了LogMsg对象频繁的构造的消耗
2.可以针对缓冲区中的日志消息,一次性进行IO,减少IO次数,提高效率
缓冲区类的设计
1.管理一个存放字符串数据的缓冲区(使用vector进行空间管理)
2.当前的写入数据位置的指针(指向可写区域的起始位置,避免数据的写入覆盖)
3.当前的读取数据位置的指针(指向可读数据区域的起始位置,当读取指针与写入指针指向相同位置的时候,代表没有数据了)
提供的操作
1.向缓冲区中写入数据
2.获取可读数据起始地址的接口
3.获取可读数据长度的接口
4.移动读写位置的接口
5.初始化缓冲区(将读写缓冲区的所有数据处理完毕之后)
6.提供交换缓冲区的操作(交换空间地址,并不交换空间数据)
/*实现异步日志器的缓冲区*/
#ifndef __M_BUF_H__
#define __M_BUF_H__
#include<iostream>
#include<vector>
#include<cassert>
namespace xupt
{
class Buffer
{
#define DEFAULT_BUFFER_SZIE (1 * 1024 * 1024) //100M
#define THREASHOLD_BUFFER_SIZE (8 * 1024 * 1024)
#define INCREAMENT_BUFFER_SIZE (1 * 1024 * 1024)
public:
Buffer() : _buffer(DEFAULT_BUFFER_SZIE), _reader_idx(0), _writer_idx(0) {}
//向缓冲区写入数据
void push(const char *data, size_t len)
{
//缓冲区空间不:1.扩容; 2.阻塞;
//if(len > writeAbleSize()) return;
//2.动态空间,测试性能极限
ensureEnough(len);
//1.将数据拷贝到缓冲区
std::copy(data, data + len, &_buffer[_writer_idx]);
//2.移动写指针
moveWriter(len);
}
//返回当前可写入的大小
size_t writeAbleSize()
{
//对于扩容的思路来说,我们不需要这个接口,因为总是可写的
//因此这个接口,仅仅针对固定大小的缓冲区大小所提供的
return(_buffer.size() - _writer_idx);
}
//返回可读数据的起始地址
const char* begin()
{
return &_buffer[_reader_idx];
}
//返回可读数据的长度
size_t readAbleSize()
{
//当前的缓冲区并不环形的
//当前实现的缓冲区,是双缓冲区的思路,处理完就交换,所以不存在空间循环使用的情况
return (_writer_idx - _reader_idx);
}
//移动读位置的接口
void moveReader(size_t len)
{
assert(len <= readAbleSize());
_reader_idx += len;
}
//重置读写位置,初始化缓冲区
void reset()
{
_writer_idx = 0; //缓冲区所有的空间都是空闲的
_reader_idx = 0; //与_writer_idx相等代表没有可读的数据
}
//对Buffer实现交换操作
void swap(Buffer &buffer)
{
_buffer.swap(buffer._buffer);
std::swap(_reader_idx, buffer._reader_idx);
std::swap(_writer_idx, buffer._writer_idx);
}
//判断缓冲区是否为空,当任务写入缓冲区不为零的时候,我们才有交换的意义。
bool empty()
{
return (_reader_idx == _writer_idx);
}
private:
//对空间进行扩容
void ensureEnough(size_t len)
{
if(len <= writeAbleSize()) return ; //如果空间足够,那么直接返回不扩容
size_t newsize = 0;
if(_buffer.size() < THREASHOLD_BUFFER_SIZE)
{
//当buffer的空间大小小于阈值的时候,二倍增长
newsize = _buffer.size() * 2 + len; //+len,防止翻倍之后依旧不满足len的情况
}
else
{
//当buffer的空间大小大于阈值的时候,线性增长
newsize = _buffer.size() + INCREAMENT_BUFFER_SIZE + len;
}
_buffer.resize(newsize);
}
//移动写位置的接口
void moveWriter(size_t len)
{
assert((len + _writer_idx) <= _buffer.size());
_writer_idx += len;
}
private:
std::vector<char> _buffer; //存储缓冲区数据的vector
size_t _reader_idx; //读取数据的下标
size_t _writer_idx; //写入数据的下标
};
}
#endif
2.日志器模块异步工作器设计与实现
①异步使用双缓冲区的思想
外界将任务数据,添加到输出缓冲器中
异步线程对处理缓冲区中的数据进行处理,若处理缓冲区中没有数据了,则交换缓冲区
②实现
管理的成员:
a.双缓冲区(生产,消费)
b.互斥锁 ,保证线程安全
c.条件变量-生产&消费(生产缓冲区没有数据,处理完处理完消费缓冲区后就休眠)
d.回调函数(针对缓冲区中数据的处理接口,外界传入一个函数,告诉工作器如何处理数据)
提供的操作:
a.停止异步工作器
b.添加数据到缓冲区
私有操作:
创建线程,线程入口函数中 交换缓冲区,对消费缓区,使用回调函数进行处理
③异步日志器的设计
继承于
Logger日志器类对于写日志操作进行函数重写(不再将数据写入文件,而是通过异步消息处理器,放到缓冲区中)
通过异步消息处理器,进行日志消息的实际落地
管理的成员
a.异步工作器(异步消息处理器)
//logger.hpp
/*
完成日志器模块:
1.抽象日志器基类
2.派生出不同的子类(同步日志器类 & 异步日志器类)
*/
#ifndef __M_LOGER_H__
#define __M_LOGER_H__
#ifndef _GNU_SOURCE
#define _GNU_SOURCE
#endif
#include"format.hpp"
#include"level.hpp"
#include"message.hpp"
#include"sink.hpp"
#include"util.hpp"
#include"looper.hpp"
#include<atomic>
#include<stdio.h>
#include<mutex>
#include<stdarg.h>
#include<cassert>
namespace xupt
{
class Logger
{
public:
using ptr = std::shared_ptr<Logger>;
Logger(const std::string& logger_name,
LogLevel::value level,
Formatter::ptr &formatter,
std::vector<LogSink::ptr> sinks):
_logger_name(logger_name),
_limit_level(level),
_formatter(formatter),
_sinks(sinks.begin(), sinks.end()){}
/*完成日志构造消息,并进行格式化,得到格式化后的日志消息字符串---然后进行落地输出*/
void debug(const std::string &file, size_t line, const std::string &fmt, ...)
{
//1.判断当前的日志是否到达了输出等级
if(LogLevel::value::DEBUG < _limit_level) { return ; }
va_list ap;
va_start(ap, fmt);
char* res;
int ret = vasprintf(&res, fmt.c_str(), ap);
if(ret == -1)
{
std::cout << "vasprintf failed!\n";
return ;
}
va_end(ap); //将ap置空
serialize(LogLevel::value::DEBUG, file, line, res);
free(res);
}
void info(const std::string &file, size_t line, const std::string &fmt, ...)
{
//1.判断当前的日志是否到达了输出等级
if(LogLevel::value::INFO < _limit_level) { return ; }
va_list ap;
va_start(ap, fmt);
char* res;
int ret = vasprintf(&res, fmt.c_str(), ap);
if(ret == -1)
{
std::cout << "vasprintf failed!\n";
return ;
}
va_end(ap); //将ap置空
serialize(LogLevel::value::INFO, file, line, res);
free(res);
}
void warn(const std::string &file, size_t line, const std::string &fmt, ...)
{
//1.判断当前的日志是否到达了输出等级
if(LogLevel::value::WARN < _limit_level) { return ; }
va_list ap;
va_start(ap, fmt);
char* res;
int ret = vasprintf(&res, fmt.c_str(), ap);
if(ret == -1)
{
std::cout << "vasprintf failed!\n";
return ;
}
va_end(ap); //将ap置空
serialize(LogLevel::value::WARN, file, line, res);
free(res);
}
void error(const std::string &file, size_t line, const std::string &fmt, ...)
{
//1.判断当前的日志是否到达了输出等级
if(LogLevel::value::ERROR < _limit_level) { return ; }
va_list ap;
va_start(ap, fmt);
char* res;
int ret = vasprintf(&res, fmt.c_str(), ap);
if(ret == -1)
{
std::cout << "vasprintf failed!\n";
return ;
}
va_end(ap); //将ap置空
serialize(LogLevel::value::ERROR, file, line, res);
free(res);
}
void fatal(const std::string &file, size_t line, const std::string &fmt, ...)
{
//1.判断当前的日志是否到达了输出等级
if(LogLevel::value::FATAL < _limit_level) { return ; }
va_list ap;
va_start(ap, fmt);
char* res;
int ret = vasprintf(&res, fmt.c_str(), ap);
if(ret == -1)
{
std::cout << "vasprintf failed!\n";
return ;
}
va_end(ap); //将ap置空
serialize(LogLevel::value::FATAL, file, line, res);
free(res);
}
protected:
void serialize(LogLevel::value level, const std::string &file, size_t line, char* str)
{
//2.构造LogMsg对象
LogMsg msg(level, line, file, _logger_name, str);
//3.通过格式化工具对LogMsg进行格式化,得到格式化后的日志字符串
std::stringstream ss;
_formatter->format(ss, msg);
//5.进行日志落地
log(ss.str().c_str(), ss.str().size());
}
/*抽象接口完成实际的落地输出--不同的日志器会有不同的实际落地方式*/
virtual void log(const char *data, size_t len) = 0;
protected:
std::mutex _mutex; // 保证过程的线程安全
std::string _logger_name; // 日志器名称
std::atomic<LogLevel::value> _limit_level; // 日志等级
Formatter::ptr _formatter; // 格式化
std::vector<LogSink::ptr> _sinks; // 用一个数组来存放日志落地位置
};
//同步日志器
class SyncLogger : public Logger
{
public:
SyncLogger(const std::string& logger_name,
LogLevel::value level,
Formatter::ptr &formatter,
std::vector<LogSink::ptr> sinks):
Logger(logger_name, level, formatter, sinks){}
protected:
virtual void log(const char *data, size_t len)
{
std::unique_lock<std::mutex> lock(_mutex);
if(_sinks.empty()) return;
for(auto &sink : _sinks)
{
sink->log(data,len);
}
}
};
class AsyncLogger : public Logger
{
public:
AsyncLogger(const std::string& logger_name,
LogLevel::value level,
Formatter::ptr &formatter,
std::vector<LogSink::ptr> sinks,
AsyncType looper_type = AsyncType::ASYNC_SAFE
):
Logger(logger_name, level, formatter, sinks),
_looper(std::make_shared<AsyncLooper>(std::bind(&AsyncLogger::realLog, this, std::placeholders::_1), looper_type))
{}
//将数据写入缓冲区
virtual void log(const char* data, size_t len)
{
_looper->push(data, len);
}
//设计一个实际落地的函数(将缓冲区中的数据落地)
void realLog(Buffer& buf)
{
//这里不需要加锁,因为这里不是多线程,是串行进行的
if(_sinks.empty()) return;
for(auto &sink : _sinks)
{
sink->log(buf.begin(), buf.readAbleSize());
}
}
private:
AsyncLooper::ptr _looper; //
};
enum class LoggerType
{
LOGGER_SYNC,
LOGGER_ASYNC
};
/*使用建造者模式来建造日志器,而不用用户直接去构造日志器,减少用户的使用复杂度*/
//1.抽象一个日志器建造者类(完成日志器对象所需零部件的构造 & 日志器的构建)
// 1.设置日志器类型
// 2.将不同类型日志器的创建放到同一个日志器建造类中完成
class LoggerBuilder
{
public:
LoggerBuilder():
_logger_type(LoggerType::LOGGER_SYNC),
_limit_level(LogLevel::value::DEBUG),
_looper_type(AsyncType::ASYNC_SAFE)
{}
void buildLoggerType(LoggerType type) { _logger_type = type; }
void buildEnableUnsafeAsync() { _looper_type = AsyncType::ASYNC_UNSAFE; }
void buildLoggerName(const std::string & name) { _logger_name = name; }
void buildLoggerLevel(LogLevel::value level) { _limit_level = level; }
void buildFomatter(const std::string &pattern)
{
_formatter = std::make_shared<Formatter>(pattern);
}
template<typename SinkType, typename ...Args>
void buildSink(Args &&... args)
{
LogSink::ptr psink = SinkFactory::create<SinkType>(std::forward<Args>(args)...);
_sinks.push_back(psink);
}
virtual Logger::ptr build() = 0;
protected:
AsyncType _looper_type;
LoggerType _logger_type;
std::string _logger_name; // 日志器名称
std::atomic<LogLevel::value> _limit_level; // 日志等级
Formatter::ptr _formatter; // 格式化
std::vector<LogSink::ptr> _sinks; // 用一个数组来存放日志落地位置
};
//2.派生出具体的建造者类---局部的日志器建造者&全局的日志器建造者(后边添加了全局单例管理器之后,将日志器添加全局管理)
class LocalLoggerBuilder : public LoggerBuilder
{
public:
Logger::ptr build() override
{
assert(_logger_name.empty() == false); //必须有日志器名称
if(_formatter.get() == nullptr)
{
_formatter = std::make_shared<Formatter>();
}
if(_sinks.empty())
{
buildSink<StdoutSink>();
}
if(_logger_type == LoggerType::LOGGER_ASYNC)
{
return std::make_shared<AsyncLogger>(_logger_name, _limit_level, _formatter, _sinks);
}
//返回同步日志器
return std::make_shared<SyncLogger>(_logger_name, _limit_level, _formatter, _sinks);
}
};
}
#endif
//looper.hpp
/*实现异步工作器*/
#ifndef __M_LOP_H__
#define __M_LOP_H__
#include"buffer.hpp"
#include<mutex>
#include<condition_variable>
#include<thread>
#include<functional>
#include<atomic>
namespace xupt
{
using Functor = std::function<void(Buffer&)>;
enum class AsyncType
{
ASYNC_SAFE, // 安全模式,表示缓冲区满了则退出
ASYNC_UNSAFE // 无限扩容
};
class AsyncLooper
{
public:
using ptr = std::shared_ptr<AsyncLooper>;
AsyncLooper(const Functor & cb, AsyncType looper_type = AsyncType::ASYNC_SAFE):
_looper_type(looper_type),
_stop(false),
_thread(std::thread(&AsyncLooper::threadEntry, this)),
_callback(cb){}
~AsyncLooper() { stop(); }
void stop()
{
_stop = true;
_cond_con.notify_all(); //唤醒所有的消费线程
_thread.join();//等待工作线程的退出
}
void push(const char *data, size_t len) //
{
//1.无限扩容 -- 不安全 2.固定大小 -- 缓冲区满的时候阻塞
std::unique_lock<std::mutex> lock(_mutex);
if(_looper_type == AsyncType::ASYNC_SAFE)
//条件变量控制,如果当前缓冲区的大小,足够放入数据,则可以添加数据
_cond_pro.wait(lock, [&](){ return _pro_buf.writeAbleSize() >= len; });
//将数据写入到缓冲区
_pro_buf.push(data, len);
//唤醒消费者对缓冲区中的数据进行处理
_cond_con.notify_one();
}
private:
// 线程入口函数
void threadEntry()
{
while(true)
{
// 为互斥锁设置一个声明周期,当缓冲区交换完,就解锁(并不对数据的处理过程加锁)
{
//退出标志已设置,并且缓冲区中没有数据,则退出
if(_stop && _pro_buf.empty()) break;
// 1.判断缓冲区是否有数据,有数据则交换,无则阻塞
std::unique_lock<std::mutex> lock(_mutex);
_cond_con.wait(lock, [&]() { return _stop || !_pro_buf.empty(); });
_con_buf.swap(_pro_buf);
if(_looper_type == AsyncType::ASYNC_SAFE)
// 唤醒生产者
_cond_pro.notify_all();
}
// 2.被唤醒后,对消费缓冲区进行处理
_callback(_con_buf);
// 3.初始化消费者缓冲区
_con_buf.reset();
}
}
private:
Functor _callback; //具体对缓冲区数据处理的函数,由异步工作器的使用这传入
private:
AsyncType _looper_type;
std::atomic<bool> _stop; // 是否停止
Buffer _pro_buf; // 生产缓冲区
Buffer _con_buf; // 消费缓冲区
std::mutex _mutex; // 互斥锁
std::condition_variable _cond_pro; // 生产条件变量
std::condition_variable _cond_con; // 消费条件变量
std::thread _thread; // 异步工作器对应的工作线程
};
}
到这本篇博客的内容就到此结束了。
如果觉得本篇博客内容对你有所帮助的话,可以点赞,收藏,顺便关注一下!
如果文章内容有错误,欢迎在评论区指正

















 504
504











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











