










简介
cmake构建方式是开源三方库的主流构建方式。DevEco Studio目前以支持cmake的构建方式。本文将通过在IDE上适配cJSON三方库为例讲来解如何在IDE上集成cmake构建方式得三方库。
创建工程
在开发进行三方库适配以及napi接口开发前,我们需要创建一个三方库对应的工程,具体创建工程方法可以参照文档通过IDE开发一个Napi工程。
IDE上适配三方库
原生库准备
下载代码
通过cJSON github网址,通过Code>>Download ZIP选项下载最新版本的源码包,并将其解压后放在IDE工程中的CPP目录下。
- 下载cJSON v1.7.17版本的库:

- 将库放在IDE工程:

加入编译构建
原生库源码准备完后,我们需要将库加入到工程的编译构建中。在工程目录CPP下的CMakeLists.txt文件中,通过add_subdirectory将cJSON加入到编译中,并通过target_link_libraries添加对cjson的链接,如下图:

到此,我们的三方库适配已经完成,可以通过IDE上的Run entry按钮进行编译及运行了。
为了能让大家更好的学习鸿蒙(HarmonyOS NEXT)开发技术,这边特意整理了《鸿蒙开发学习手册》(共计890页),希望对大家有所帮助:https://qr21.cn/FV7h05
《鸿蒙开发学习手册》:
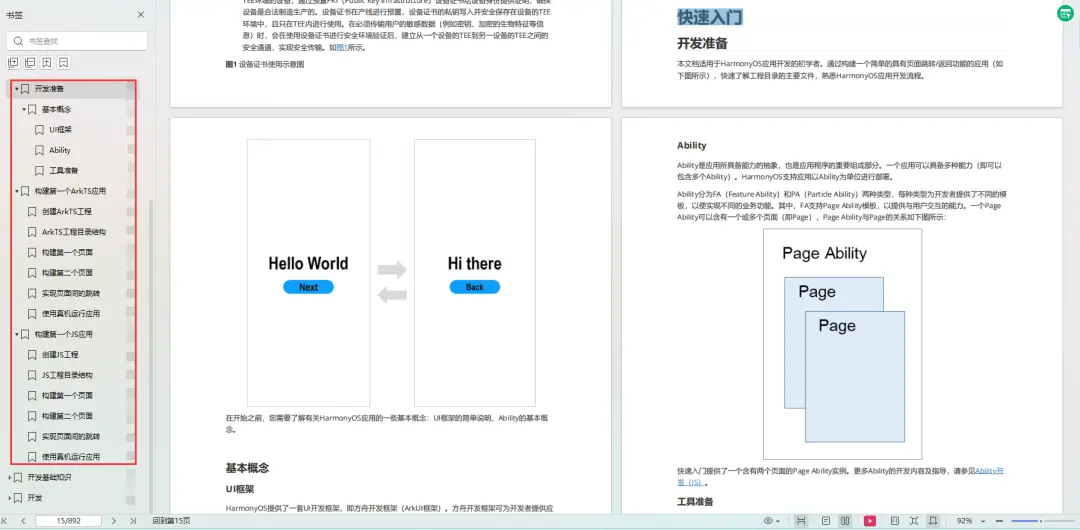
如何快速入门:https://qr21.cn/FV7h05
- 基本概念
- 构建第一个ArkTS应用
- ……
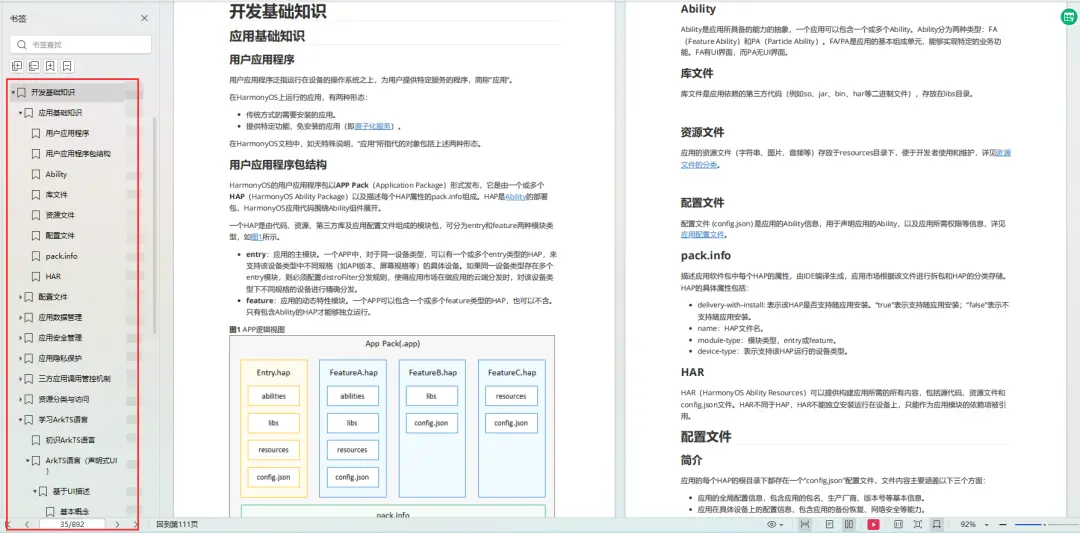
开发基础知识:https://qr21.cn/FV7h05
- 应用基础知识
- 配置文件
- 应用数据管理
- 应用安全管理
- 应用隐私保护
- 三方应用调用管控机制
- 资源分类与访问
- 学习ArkTS语言
- ……
基于ArkTS 开发:https://qr21.cn/FV7h05
- Ability开发
- UI开发
- 公共事件与通知
- 窗口管理
- 媒体
- 安全
- 网络与链接
- 电话服务
- 数据管理
- 后台任务(Background Task)管理
- 设备管理
- 设备使用信息统计
- DFX
- 国际化开发
- 折叠屏系列
- ……

鸿蒙开发面试真题(含参考答案):https://qr18.cn/F781PH
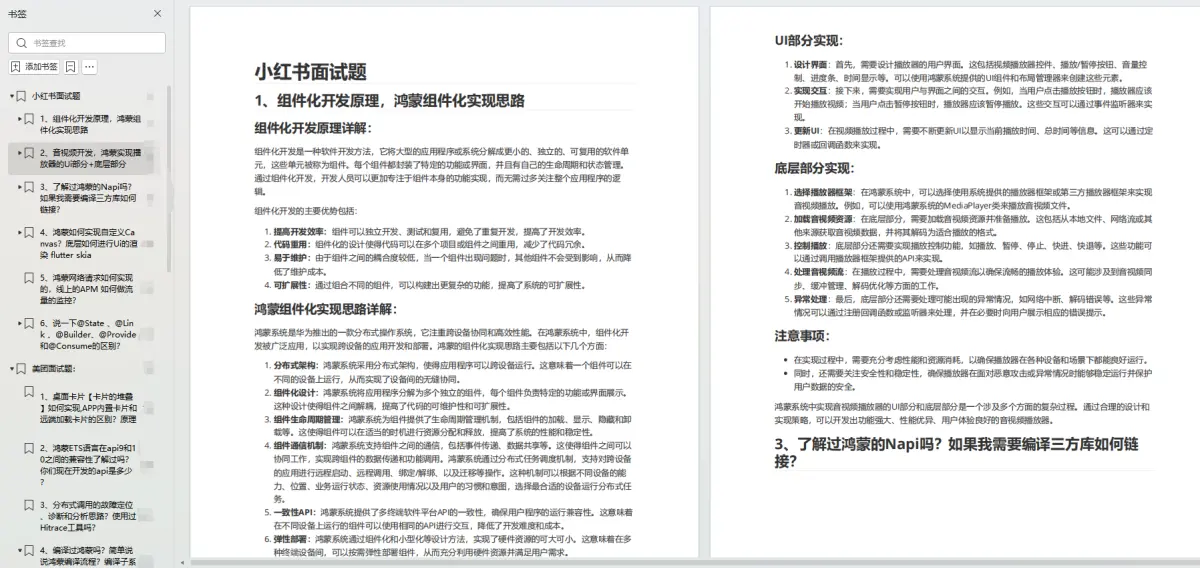
鸿蒙开发面试大盘集篇(共计319页):https://qr18.cn/F781PH
1.项目开发必备面试题
2.性能优化方向
3.架构方向
4.鸿蒙开发系统底层方向
5.鸿蒙音视频开发方向
6.鸿蒙车载开发方向
7.鸿蒙南向开发方向















 936
936











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









