






蒜头君要回家,已知蒜头君在 左下角(1,1)位置,家在 右上角(n,n)坐标处。蒜头君走上一个格子就会花费相应体力,而且蒜头君只会往家的方向走,也就是只能往上,或者往右走。蒜头君想知道他回到家需要花费的最少体力是多少。
例如下图所示,格子中的数字代表走上该格子花费的体力:
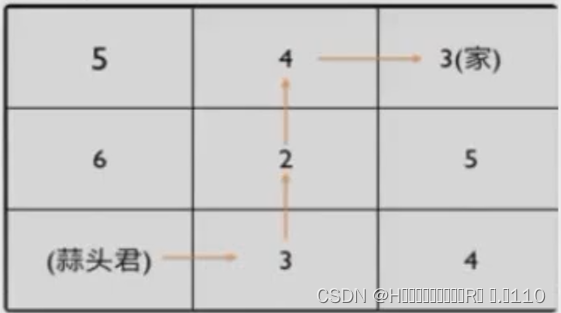
对于该图来说,最优策略已在图上标出,最少花费体力为:3+2+4+3=12。我们把走到一个点看做一个状态,对蒜头君来说,走到一个点只有两种方式,一个是从下面走到该点,一种是从左边走到该点。那么点(i,j)要么是从(i- 1,j)走到(i,j),要么是从点(i,j - 1)走到(i,j)。所以从哪个点走到(ù,j)就是一个 决策。接下来,我们用 dp(i,j)来代表走到点(i,j)一共花费的最少体力。我们需要花费最少力气走到家,所以可以得到状态转移方程:dp(i,j)= min(dp(i-1,j),dp(i,j-1))+ aij。根据转移方程,我们可以推出走到每个点花费的最少体力。
对于图中的边界点,要在转移前加上判断是否为边界,如:点(1,3)只能从点(1,2)走过来,点(3,1)只能从点(2,1)走过来等等。
动态规划的题目的核心是写出状态转移方程,对于一个动态规划的题目,如果我们能写出转移方程那么代码实现就变得简单多。大部分的动态规划题目,在计算出转移方程后,可以用类似于递推的循环结构,来写出代码。
注:输入样例将上图倒回来用数组存储,所以条件改为只能向下走和向左走
输入样例:
3
0 3 4
6 2 5
5 4 3
输出样例:
12
import java.util.*;
public class LANQIAO1 {
public static int[][] a = new int[110][110];
public static int[][] dp = new int[110][110];
public static void main(String[] args) {
Scanner sc = new Scanner(System.in);
int n = sc.nextInt();
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
a[i][j] = sc.nextInt();
}
}
// 从1 1开始,以1 1为起点
dp[1][1] = 0;
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
// 将起点情况排除
if(i == 1 && j == 1){
continue;
}
// 处理两种边界情况
else if(i == 1){
dp[i][j] = dp[i][j - 1] + a[i][j];
}
else if(j == 1){
dp[i][j] = dp[i - 1][j] + a[i][j];
}
// 取二者较小值
else {
dp[i][j] = Math.min(dp[i][j-1] , dp[i-1][j]) + a[i][j];
}
}
}
System.out.println(dp[n][n]);
return;
}
}















 956
956











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









